เคล็ดลับการสแกน: ปรับปรุงการกำหนดเป้าหมายของสแกนเนอร์
หลังจากเริ่มต้นการสแกน สแกนเนอร์จะถ่ายภาพเป็นชุด ปรับลักษณะเฉพาะต่าง ๆ ในรูป 2 มิติ และต่อภาพเหล่านั้นเข้าด้วยกันเป็นรูปทรงเรขาคณิตที่สแกนแล้วทันที
เพื่อให้ได้การสแกนที่สมบูรณ์ การกำหนดเป้าหมายของสแกนเนอร์มีความสำคัญ สแกนเนอร์ 3 มิติจะกำหนดเป้าหมายของตัวเองโดยการจำแนกลักษณะเฉพาะต่าง ๆ บนพื้นผิว
ลักษณะเฉพาะที่โดดเด่นจะใช้เป็นจุดอ้างอิงสำหรับการเชื่อมโยงภาพเชิงลึกเข้าด้วยกัน
อย่างไรก็ตาม สแกนเนอร์อาจกำหนดเป้าหมายไม่ถูกต้องเมื่อทำการสแกนเป้าหมายบนพื้นผิวที่ราบเรียบ ดังนั้นจึงทำให้เกิดปัญหา “การติดตามขาดหาย“, และอาจนำไปสู่การสแกนที่ไม่สมบูรณ์
ถึงกระนั้นก็ตาม ยังคงมีความเป็นไปได้ที่จะทำให้ได้ผลลัพธ์การสแกนที่ดีแม้เมื่อทำการสแกนบนพื้นผิวที่ราบเรียบ อ่านเคล็ดลับต่อไปนี้เกี่ยวกับวิธีการจัดการกับเป้าหมายที่ไม่มีลักษณะเฉพาะสำหรับการกำหนดเป้าหมาย
เคล็ดลับที่ 1: เพิ่มลักษณะเฉพาะต่าง ๆ ในพื้นผิวที่ราบเรียบ
วิดีโอสาธิต: โหมดหัว
สำหรับสแกนเนอร์ 3 มิติ เส้นผลที่ตรงและเรียบถือเป็นความท้าทายในการกำหนดเป้าหมายของสแกนเนอร์ ในกรณีนี้ ขอแนะนำให้คุณสวมอุปกรณ์เสริมบนศีรษะสำหรับการตรวจจับเพื่อกำหนดเป้าหมายที่ดีกว่า
สามารถที่จะสแกนเส้นผมที่ตรงและเรียบได้อย่างเป็นสำเร็จด้วยอุปกรณ์เสริม
รูปแบบเส้นผมเรียบที่มีอุปกรณ์เสริมทำให้การสแกนง่ายขึ้น
ข้อแนะนำ: การรวบเส้นผมอาจช่วยปรับปรุงการกำหนดเป้าหมายด้วยเช่นกัน
วิดีโอสาธิต: โหมดวัตถุ
วัตถุเครื่องหมายเตือนมีพื้นผิวที่ไม่มีลักษณะเฉพาะเมื่อทำการสแกนจากมุมขนาน เพื่อการกำหนดเป้าหมายที่ดีกว่าของสแกนเนอร์ ขอแนะนำให้ใส่วัตถุอย่างอื่นเหนือเป้าหมายเป็นจุดอ้างอิง
ข้อแนะนำ: ปรับการวางตำแหน่งเป้าหมายการสแกนเช่น วางวัตถุรูปทรงกระบอกนอนลง อาจช่วยในการปรับปรุงความแม่นยำในการระบุตำแหน่งของสแกนเนอร์
เคล็ดลับที่ 2: วางวัตถุอย่างอื่นรอบ ๆ เป้าหมายการสแกน
วิดีโอสาธิต: โหมดหัว
เส้นผมที่ค่อนข้างเรียบถือเป็นความท้าทายสำหรับการสแกน ในกรณีนี้ คุณอาจสแกนวัตถุรอบ ๆ ศีรษะ เช่น ปกเสื้อและไหล่ เพื่อปรับปรุงการกำหนดเป้าหมายในการสแกน
วิดีโอสาธิต: โหมดวัตถุ
เมื่อทำการสแกนวัตถุที่มีพื้นผิวราบเรียบหรือไม่มีลักษณะที่นูนขึ้นมาอย่างมีนัยยะสำคัญ สามารถที่จะใช้วัตถุเพิ่มเติมเป็นจุดอ้างอิงเพื่อปรับปรุงความแม่นยำในการระบุตำแหน่งของสแกนเนอร์
ข้อแนะนำ: วัตถุเพิ่มเติมที่ใช้เป็นจุดอ้างอิงสำหรับสแกนเนอร์สามารถที่จะลบออกโดยใช้ซอฟต์แวร์แก้ไขตาข่าย 3 มิติ
เคล็ดลับที่ 3: ใช้พื้นที่ที่สแกนแล้วเป็นจุดอ้างอิงสำหรับพื้นผิวลูกคลื่นลอนลาด
วิดีโอสาธิต: โหมดหัว
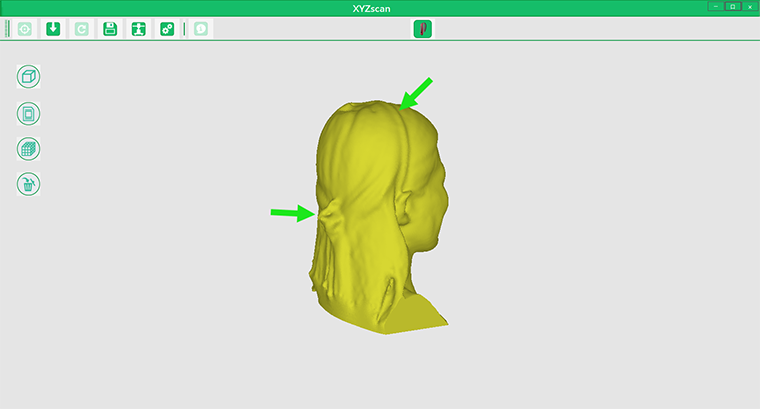
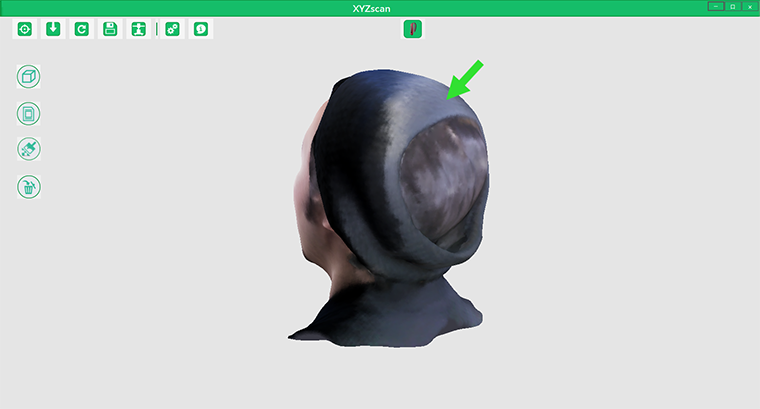
ในการสแกนวัตถุที่มีสีเข้มกว่าหรือเป้าหมายที่พื้นผิวไม่มีลักษณะเฉพาะในบางพื้นที่ สแกนเนอร์อาจสูญเสียการติดตามเนื่องจากการกำหนดเป้าหมายที่พลาด
ในกรณีนี้ ขอแนะนำให้สแกนพื้นที่ที่มีลักษณะเฉพาะมากกว่า ซึ่งง่ายสำหรับการสแกน และใช้พื้นที่ที่สแกนแล้วเป็นจุดอ้างอิงสำหรับการสแกนพื้นที่ที่ไม่มีลักษณะเฉพาะ
หมายเหตุ: สีหรือองค์ประกอบบนพื้นผิวจะไม่สามารถใช้เป็นจุดอ้างอิงสำหรับการสแกนได้ สำหรับวัตถุสีสันสดใสที่พื้นผิวไม่มีลักษณะเฉพาะ ยังคงเป็นเรื่องยากสำหรับการกำหนดเป้าหมายของสแกนเนอร์ สแกนเนอร์ 3 มิติจะทำงานได้ดีกว่าบนเป้าหมายที่มีลักษณะเฉพาะมากขึ้น
เคล็ดลับที่ 4: ปรับเปลี่ยนมุมการมองของสแกนเนอร์สำหรับมุมแหลมบนขอบของพื้นผิวที่ราบเรียบ
วิดีโอสาธิต: โหมดวัตถุ
ภาพตามเวลาจริงจะแสดงขึ้นมาเฉพาะเมื่อถือสแกนเนอร์ในแนวนอนเท่านั้น ดังนั้นสำหรับขั้นตอนการสแกนที่เป็นได้โดยสัญชาตญาณมากขึ้น ขอแนะนำให้ถือสแกนเนอร์ในแนวนอน
อย่างไรก็ตาม การปรับเปลี่ยนมุมมองของสแกนเนอร์เพื่อสแกนจากมุมมองขนานเป็นสิ่งจำเป็นสำหรับการสแกนลักษณะเฉพาะบางอย่่าง ซึ่งเป็นประโยชน์อย่างยิ่งสำหรับการสแกนมุมแหลมบนขอบของพื้นผิวที่ราบเรียบ ซึ่งขัดขวางการกำหนดเป้าหมายของสแกนเนอร์
หมายเหตุ: ในโหมดหัว ควรถือสแกนเนอร์แนวนอนเพื่อโฟกัสและเริ่มต้นการสแกน ทิศทางของสแกนเนอร์สามารถที่จะเปลี่ยนได้ตามต้องการหลังจากเริ่มต้นการสแกน
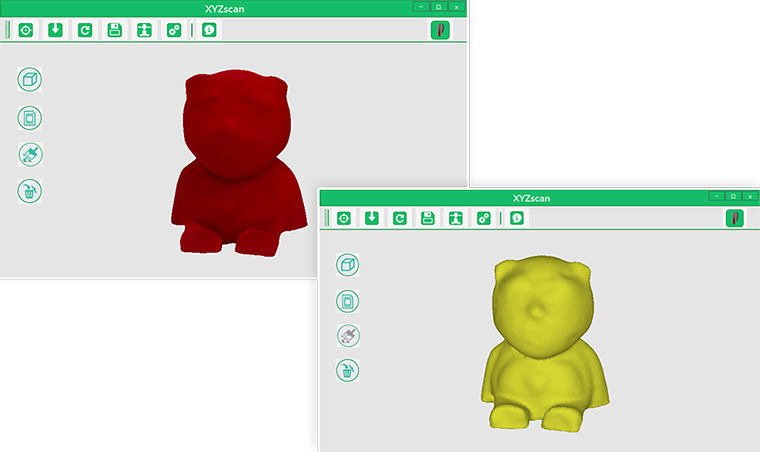
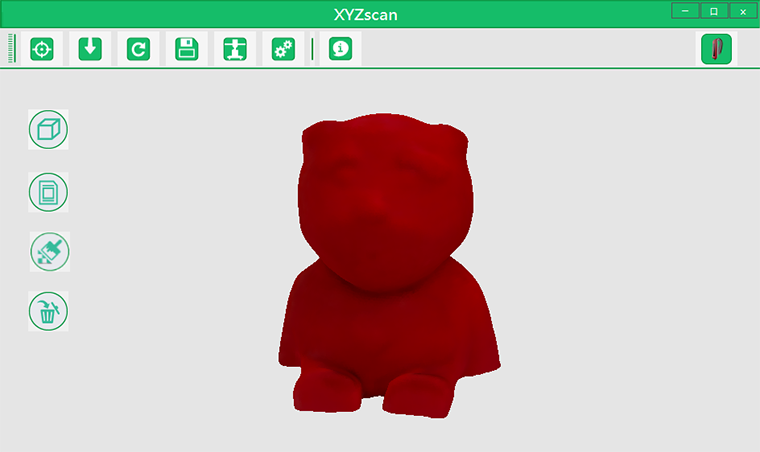
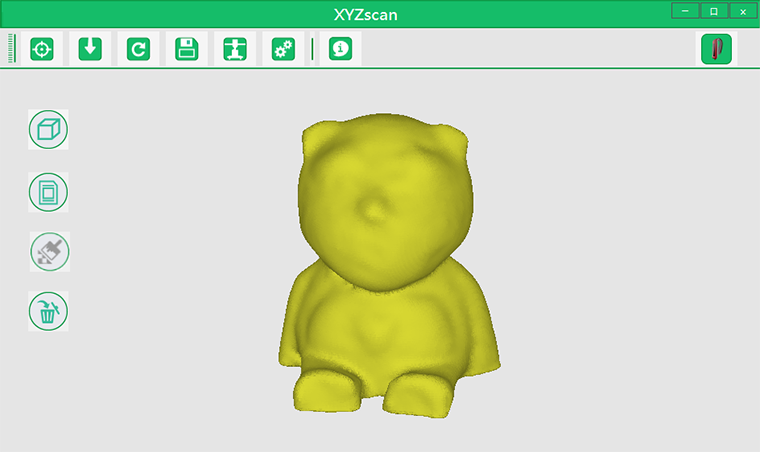
 คุณอาจจะกดไอคอนนี้ที่อยู่ทางด้านซ้ายของแบบจำลอง 3 มิติเพื่อที่จะปิดใช้งานพื้นผิวสีสำหรับดูรายละเอียดของแบบจำลอง
คุณอาจจะกดไอคอนนี้ที่อยู่ทางด้านซ้ายของแบบจำลอง 3 มิติเพื่อที่จะปิดใช้งานพื้นผิวสีสำหรับดูรายละเอียดของแบบจำลอง