XYZmaker tutorial – Robot Hand part 1
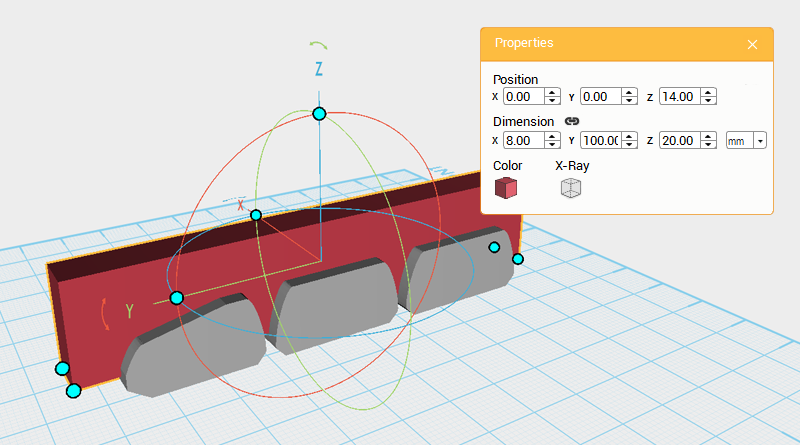
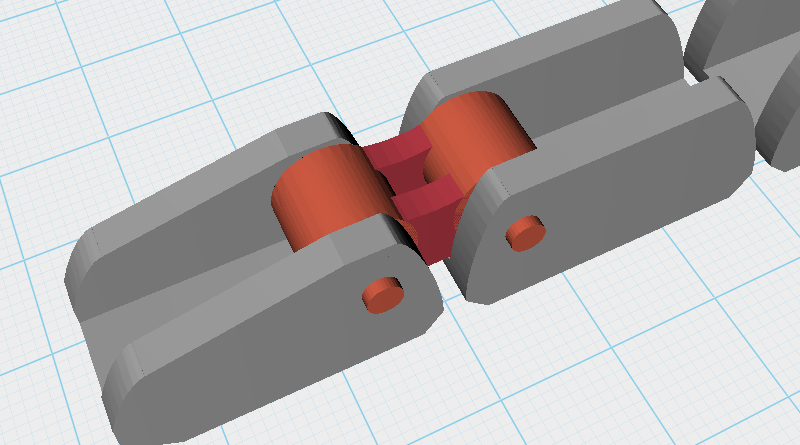
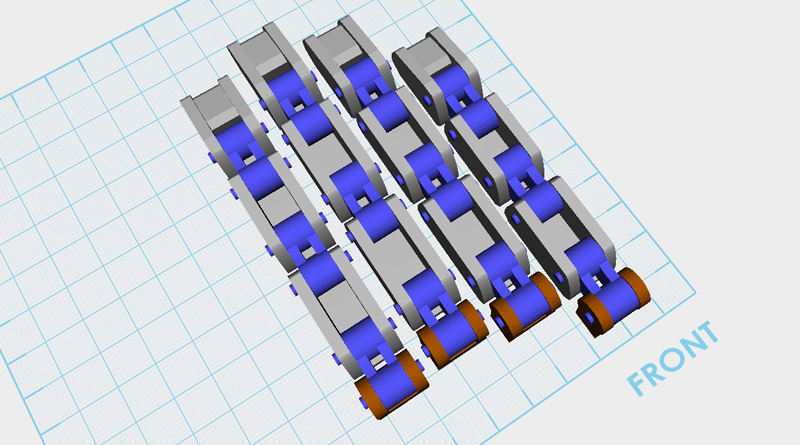
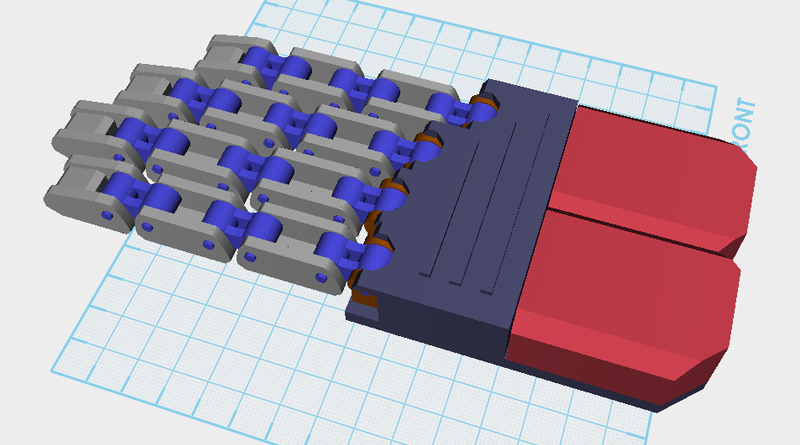
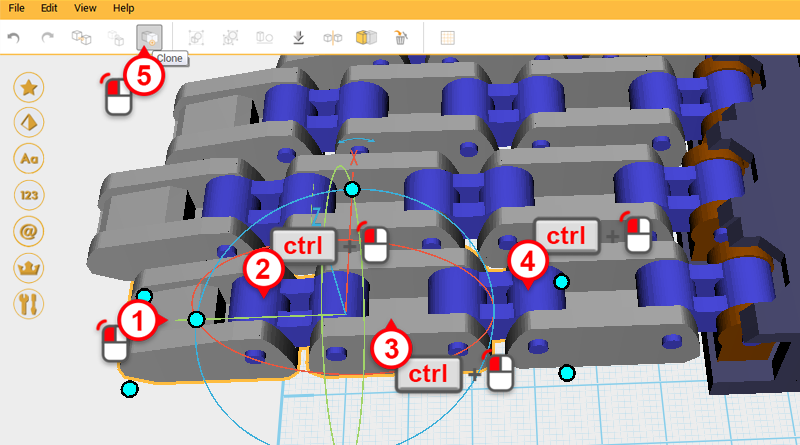
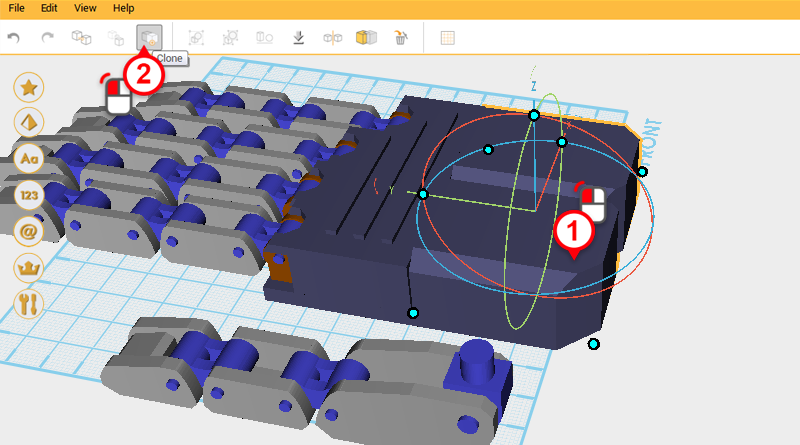
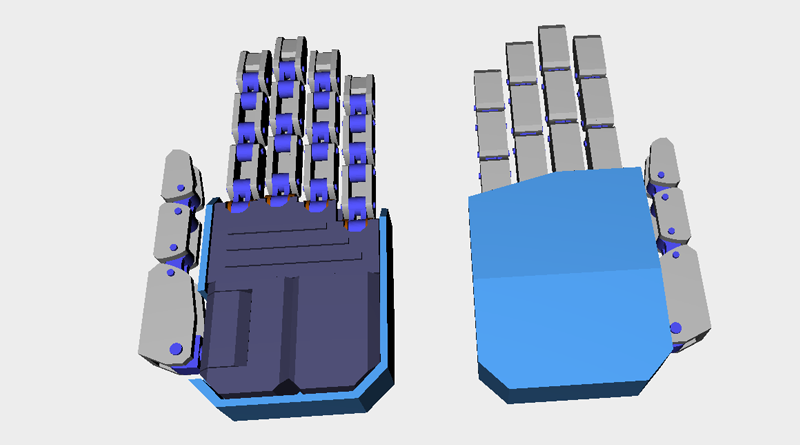
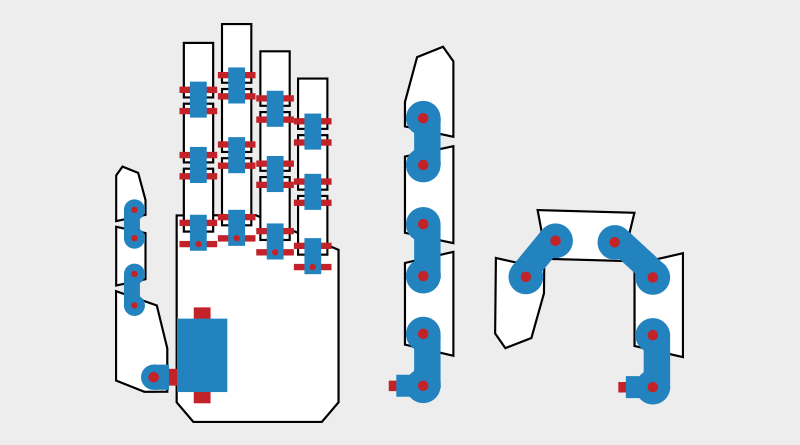
This tutorial uses XYZmaker to model basic 3D shapes, combine, and edit them – teaching you to create a functioning model of a robotic hand that is able to close and open. First collect some reference material and compare all the different types of robotic hands. Next, using paper or sketching software, plan all the parts that you need to make and their individual rotation joints. After creating this reference drawing, use a chain-like structure for the joints, and give the finger links a bigger range of mobility. The blue parts in the image above are the joints, and the red parts will act as shafts that hold the pieces together. Create a cube and change its dimensions to X: 14,Y: 28,Z: 14 mm and position to X: 0,Y: 0,Z: 7. Call this part the Finger joint A. Select Finger joint A and click Clone. Next, change the dimensions to X: 20,Y: 10,Z: 30 mm, and position to X: 0,Y: -18,Z:
Read more