XYZmaker建模教学 – 机械手PART2
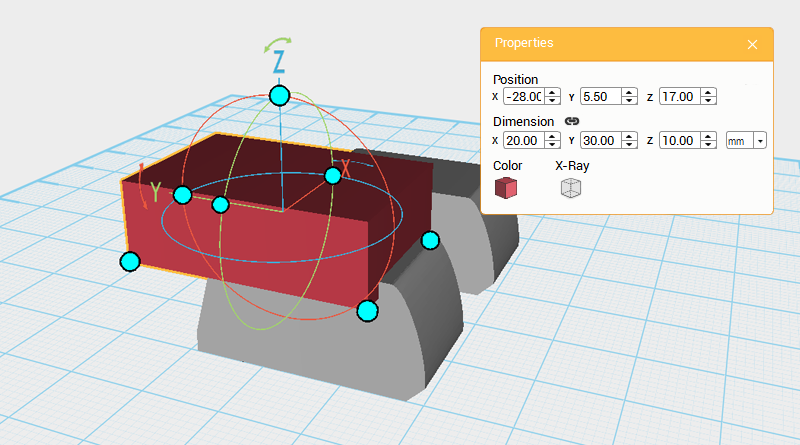 接着要替指尖的前端切削出形状,建立一个﹝Cube﹞对象,尺寸设定为X: 20,Y: 30,Z: 10 mm,位置设定为X: -28,Y: 5.5,Z: 17,作为「切削」对象。
接着要替指尖的前端切削出形状,建立一个﹝Cube﹞对象,尺寸设定为X: 20,Y: 30,Z: 10 mm,位置设定为X: -28,Y: 5.5,Z: 17,作为「切削」对象。 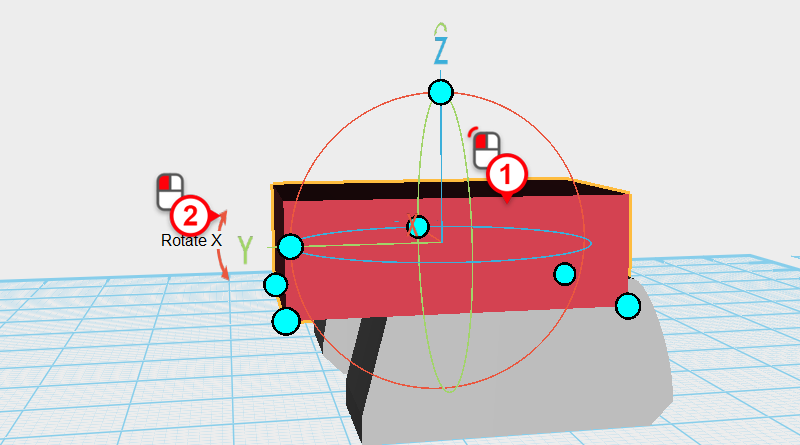
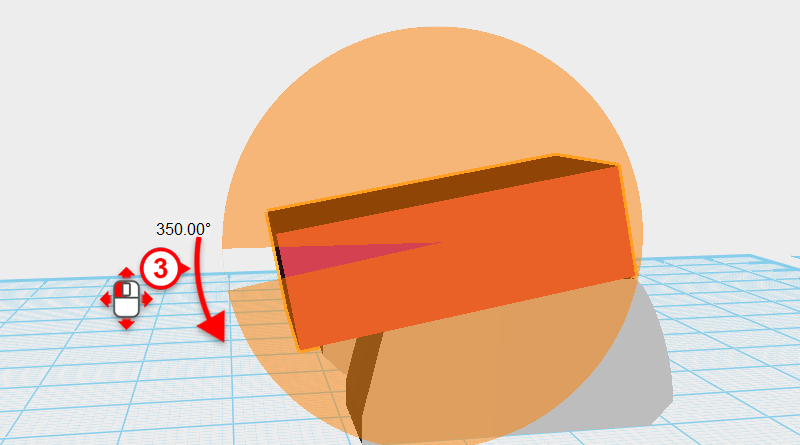 选取「切削」对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为350度。
选取「切削」对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为350度。 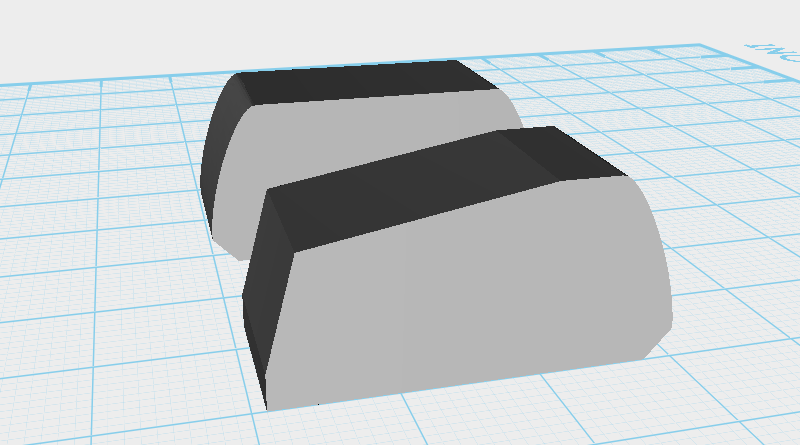 接着利用切削对象与﹝Hole﹞功能,将「指尖」对象上方切削出如图的斜面。
接着利用切削对象与﹝Hole﹞功能,将「指尖」对象上方切削出如图的斜面。 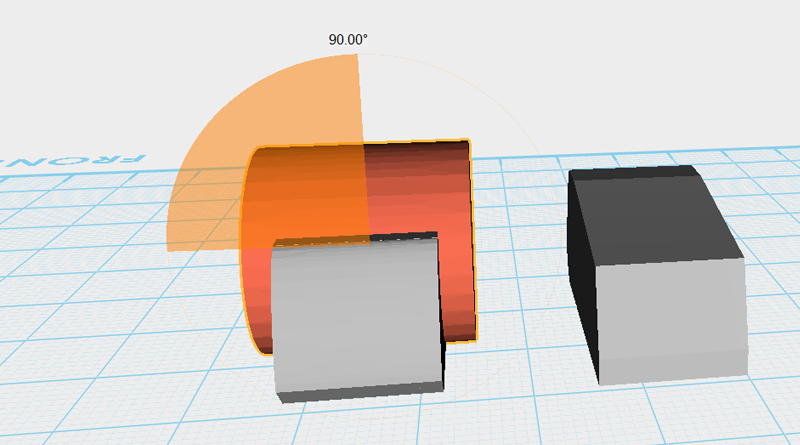
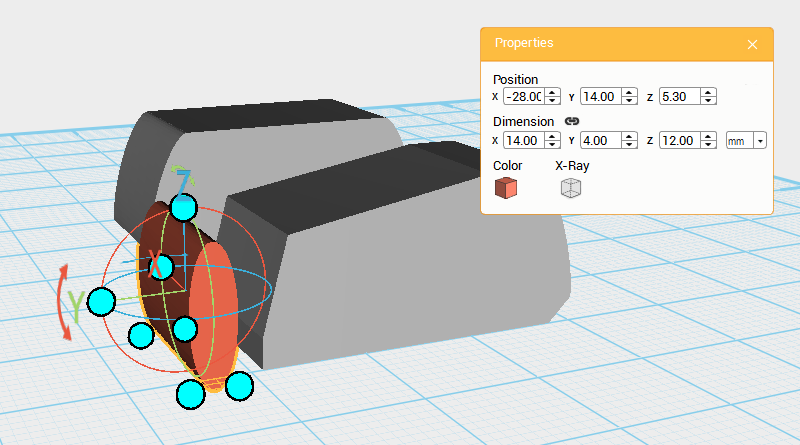 建立一个﹝Cylinder﹞对象,对Y轴旋转90度后,将尺寸设定为X: 14,Y: 4,Z: 12 mm,位置设定为X: -28,Y: 18,Z: 5.3。
建立一个﹝Cylinder﹞对象,对Y轴旋转90度后,将尺寸设定为X: 14,Y: 4,Z: 12 mm,位置设定为X: -28,Y: 18,Z: 5.3。 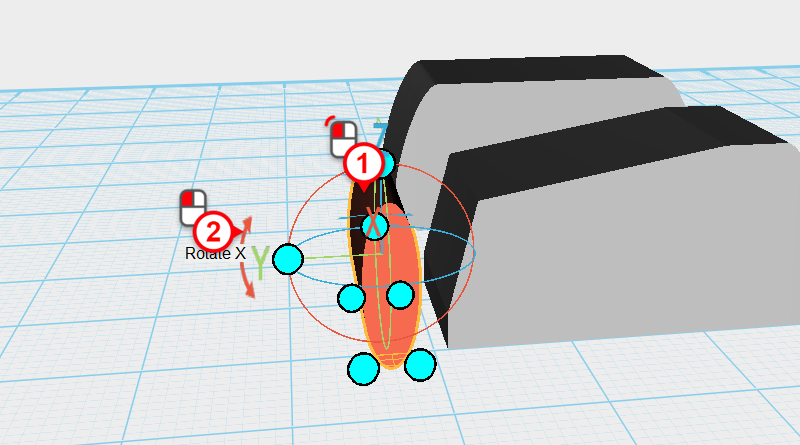
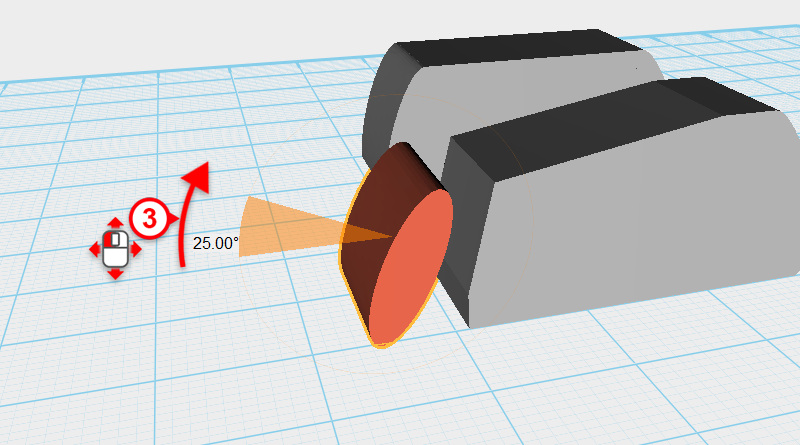 选取﹝Cylinder﹞对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为25度。
选取﹝Cylinder﹞对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为25度。 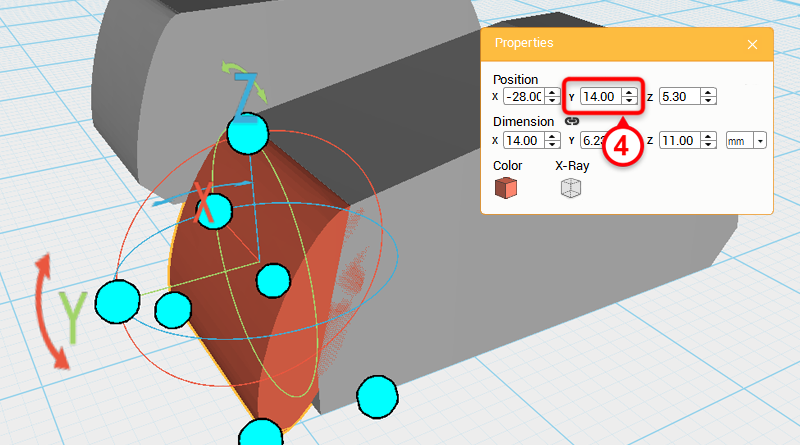 接着将位置的Y值设定为14。
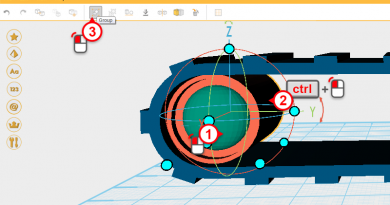
接着将位置的Y值设定为14。 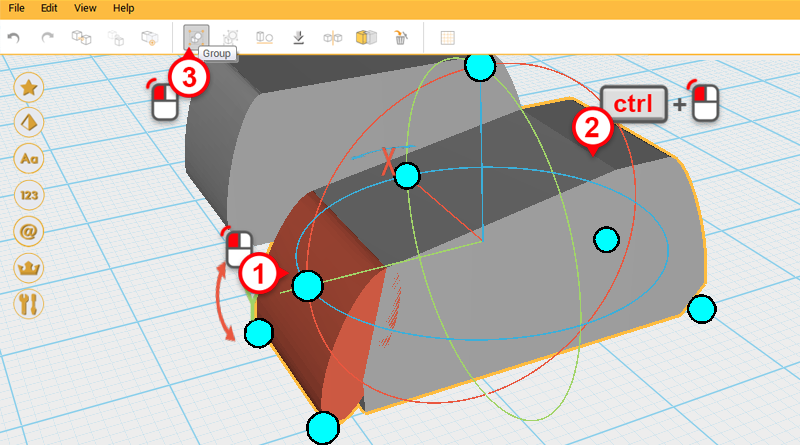 选取﹝Cylinder﹞对象,按键盘的﹝ctrl﹞键再点击「指尖」对象完成加选,接着按下﹝Group﹞按钮。
选取﹝Cylinder﹞对象,按键盘的﹝ctrl﹞键再点击「指尖」对象完成加选,接着按下﹝Group﹞按钮。 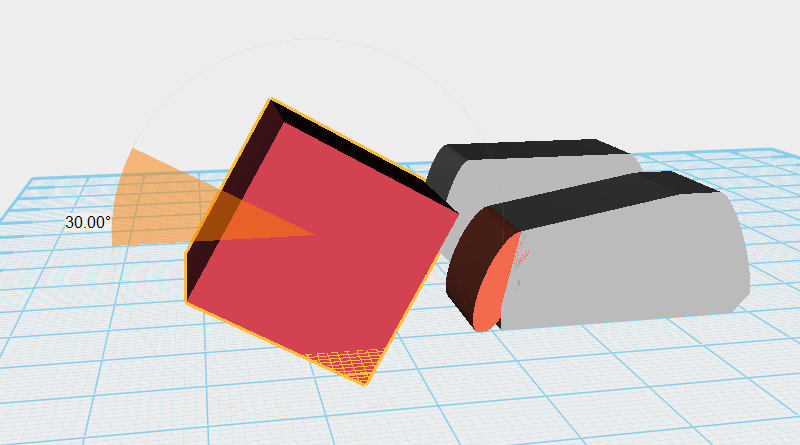
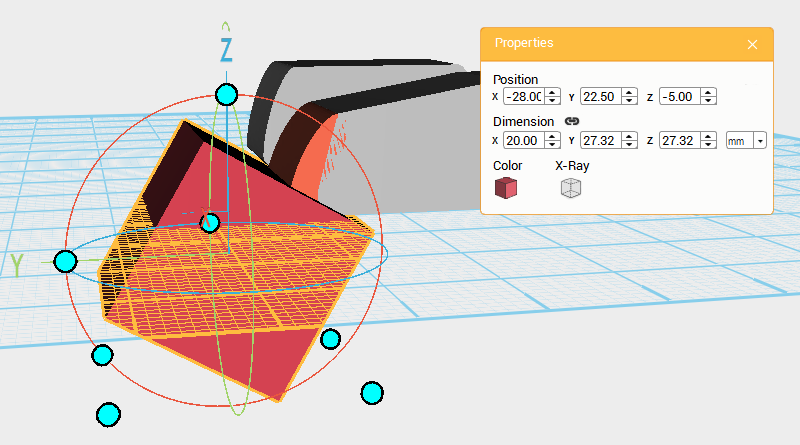 建立一个﹝Cube﹞对象,对X轴旋转30度后,位置设定为X: -28,Y: 22.5,Z: -5。
建立一个﹝Cube﹞对象,对X轴旋转30度后,位置设定为X: -28,Y: 22.5,Z: -5。 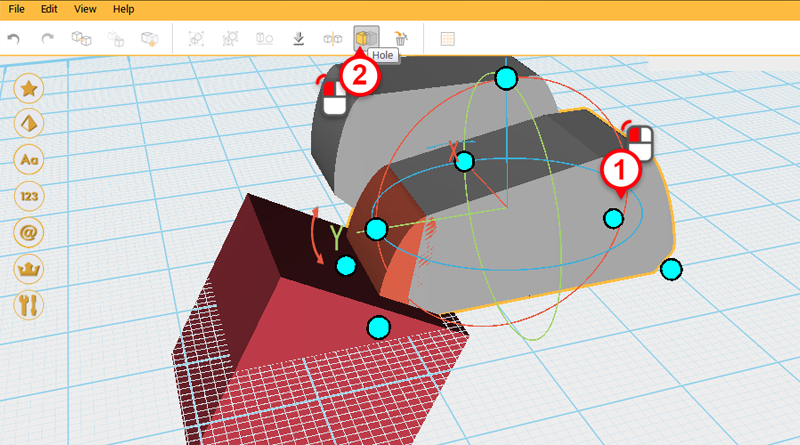
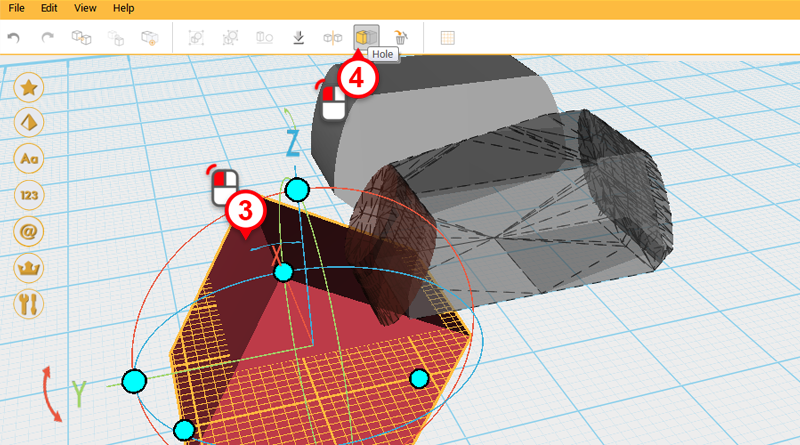
 利用刚刚建立的﹝Cube﹞对象与﹝Hole﹞功能,对「指尖」对象切削出如图的斜边。
利用刚刚建立的﹝Cube﹞对象与﹝Hole﹞功能,对「指尖」对象切削出如图的斜边。 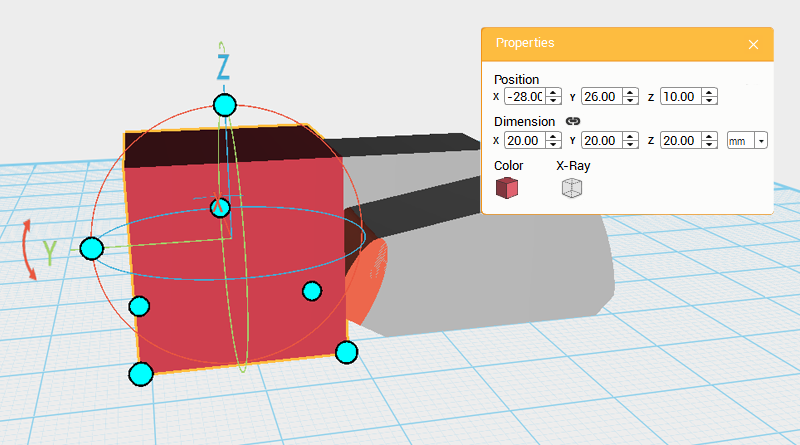 建立一个﹝Cube﹞对象,将位置设定为X: -28,Y: 26,Z: 10。
建立一个﹝Cube﹞对象,将位置设定为X: -28,Y: 26,Z: 10。  利用刚刚建立的﹝Cube﹞对象与﹝Hole﹞功能,对「指尖」对象的尖端进行切削。
利用刚刚建立的﹝Cube﹞对象与﹝Hole﹞功能,对「指尖」对象的尖端进行切削。 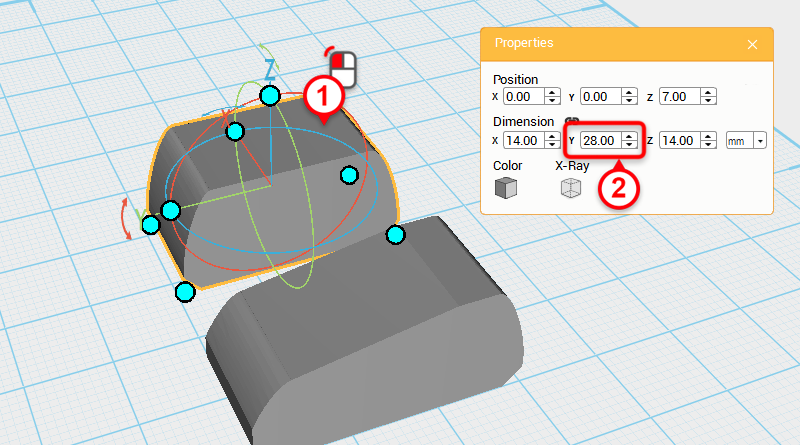
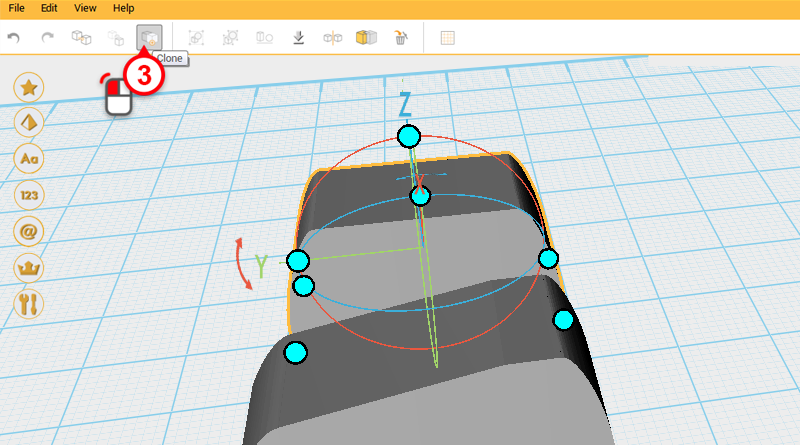 选取「指节A」对象,将尺寸的Y值改为28mm,接着按下﹝Clone﹞按钮,复制出「指节B」对象。
选取「指节A」对象,将尺寸的Y值改为28mm,接着按下﹝Clone﹞按钮,复制出「指节B」对象。 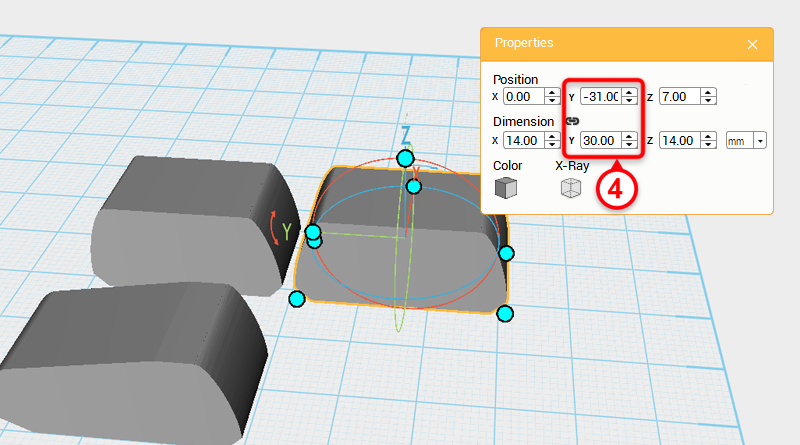 接着将「指节B」对象尺寸的Y值改为30mm,位置的Y值改为-31。
接着将「指节B」对象尺寸的Y值改为30mm,位置的Y值改为-31。 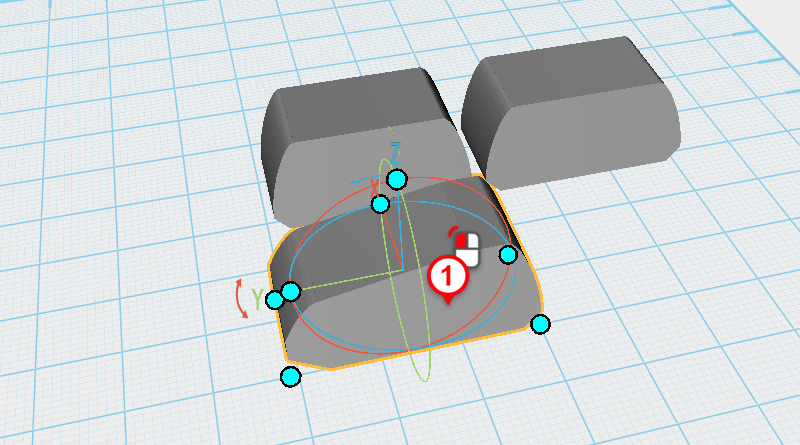
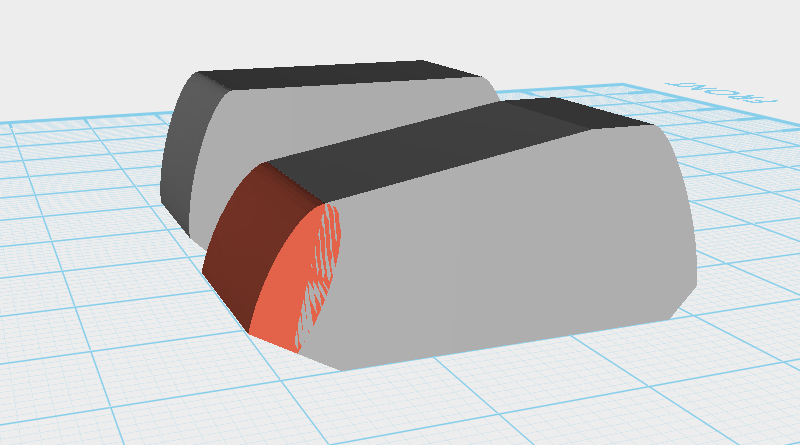
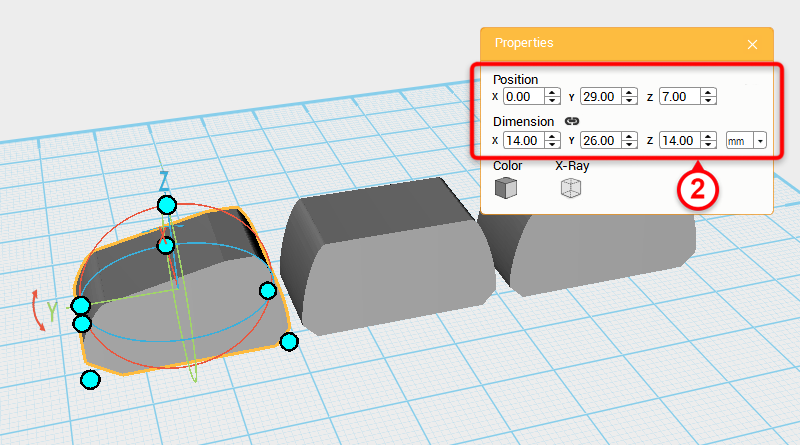 选取「指尖」对象,将尺寸设定为X: 14,Y: 26,Z: 14 mm,位置设定为X: 0,Y: 29,Z: 7。
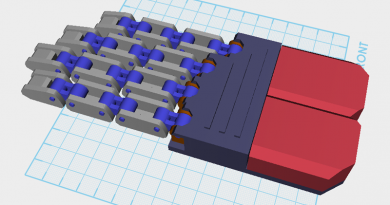
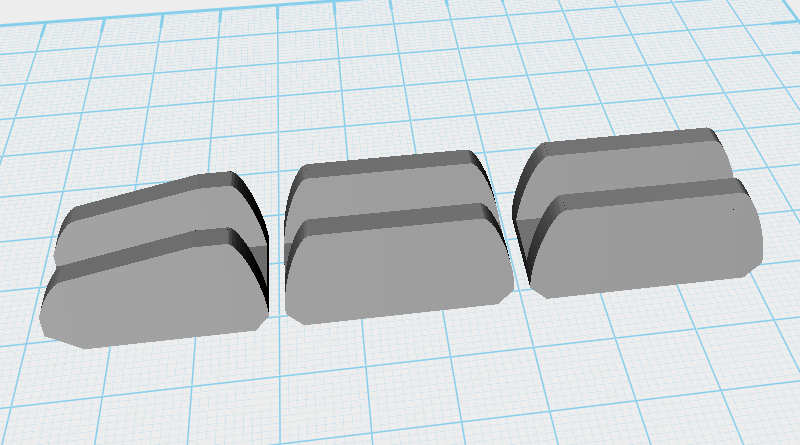
选取「指尖」对象,将尺寸设定为X: 14,Y: 26,Z: 14 mm,位置设定为X: 0,Y: 29,Z: 7。 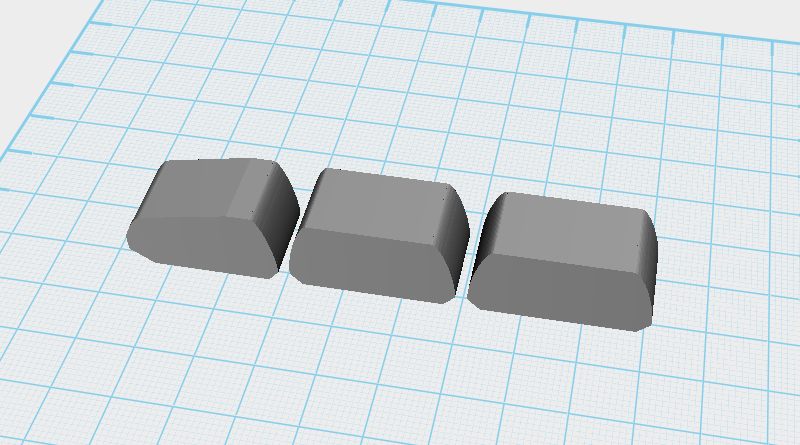 目前阶段完成的手指模型应如图所示。
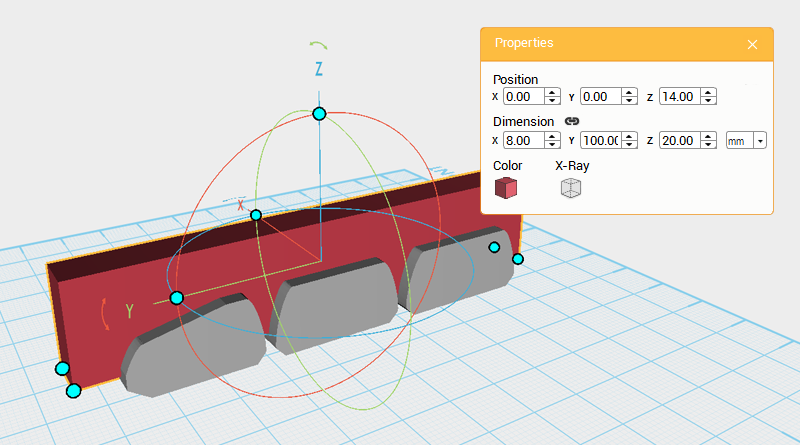
目前阶段完成的手指模型应如图所示。 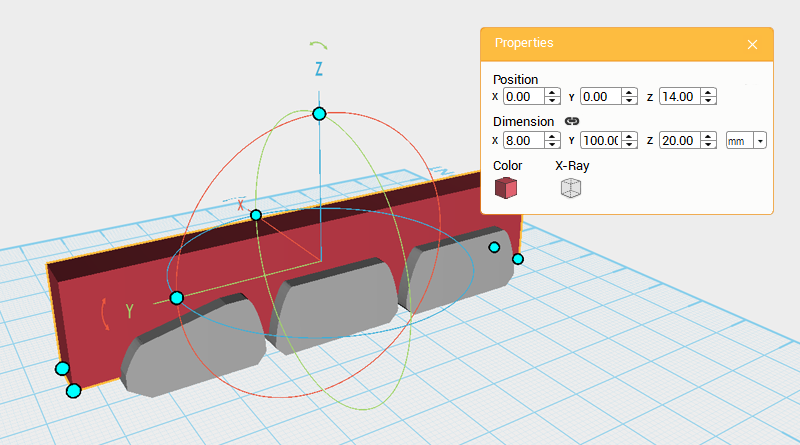 接着要将手指模型切削出放置关节的空间,建立一个﹝Cube﹞对象,将尺寸设定为X: 8,Y: 100,Z: 20 mm,并将位置的Z值设定为14,作为「切削」对象。
接着要将手指模型切削出放置关节的空间,建立一个﹝Cube﹞对象,将尺寸设定为X: 8,Y: 100,Z: 20 mm,并将位置的Z值设定为14,作为「切削」对象。 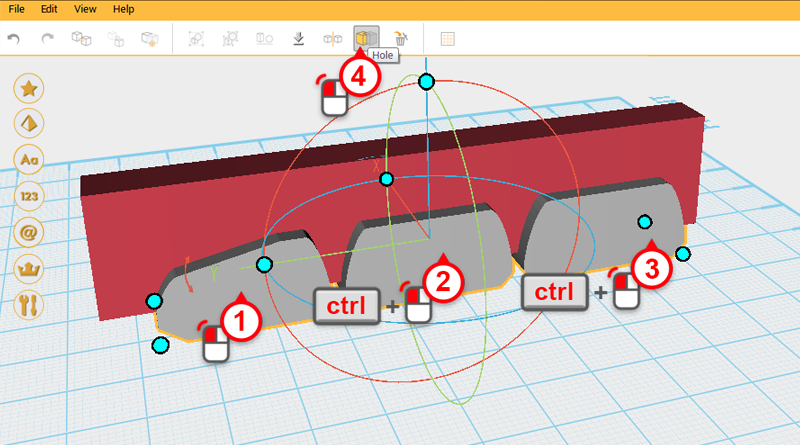 选取「指尖」对象、「指节A」对象、「指节B」对象,按下﹝Hole﹞按钮。
选取「指尖」对象、「指节A」对象、「指节B」对象,按下﹝Hole﹞按钮。 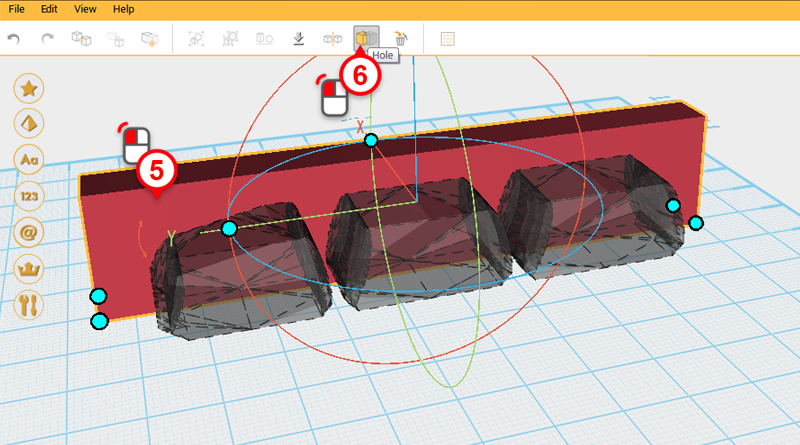
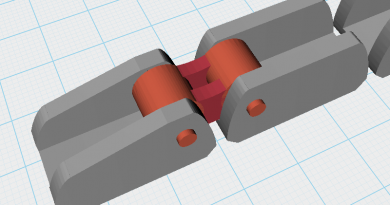
 选取「切削」对象,再按下﹝Home﹞按钮,对这三个对象切削出凹槽。
选取「切削」对象,再按下﹝Home﹞按钮,对这三个对象切削出凹槽。