XYZmaker建模教学 – 机械手PART4
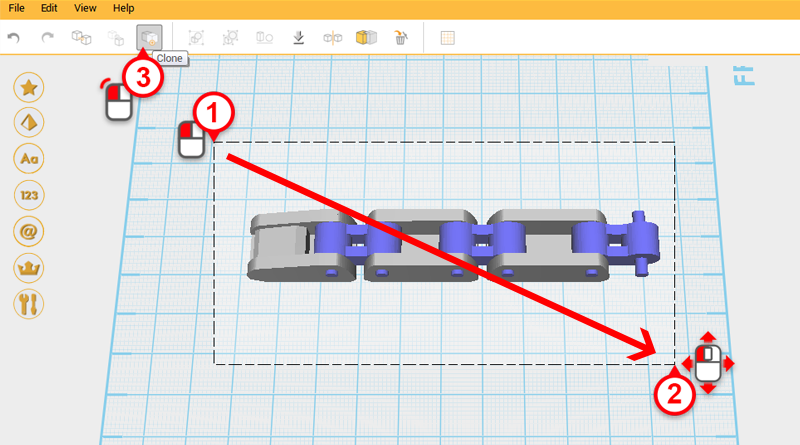
 框选所有对象,按下﹝Clone﹞按钮,接着将位置的X值设定为18,复制出中指。
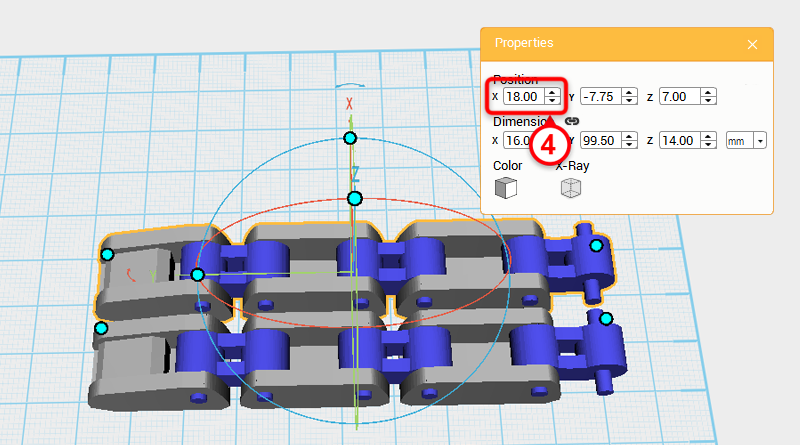
框选所有对象,按下﹝Clone﹞按钮,接着将位置的X值设定为18,复制出中指。 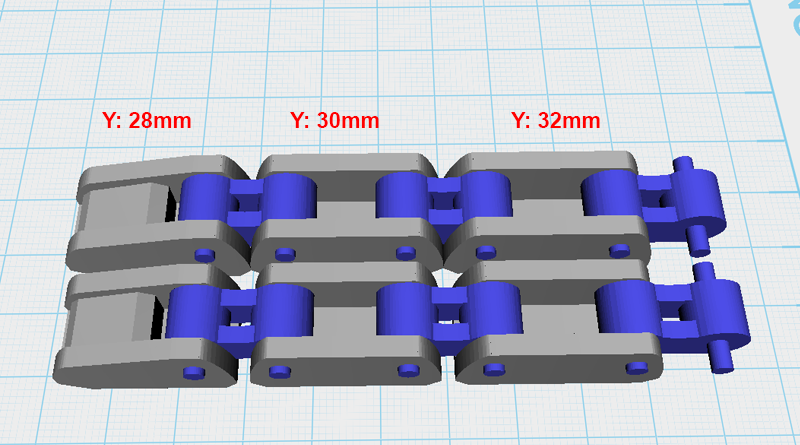 由于中指长度较长,因此如图所示设定指尖与指节对象的尺寸Y值。
由于中指长度较长,因此如图所示设定指尖与指节对象的尺寸Y值。 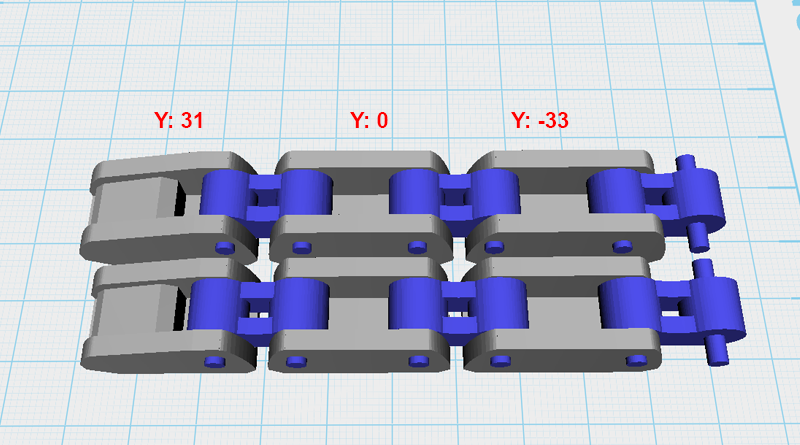 调整完尺寸后,如图所示调整指尖与指节对象位置的Y值,让对象的间距保持一致。
调整完尺寸后,如图所示调整指尖与指节对象位置的Y值,让对象的间距保持一致。 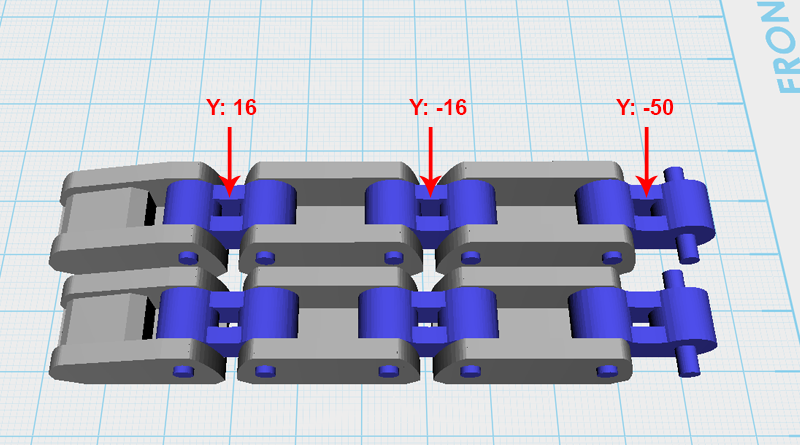 最后如图调整「手指关节」对象的位置Y值。
最后如图调整「手指关节」对象的位置Y值。 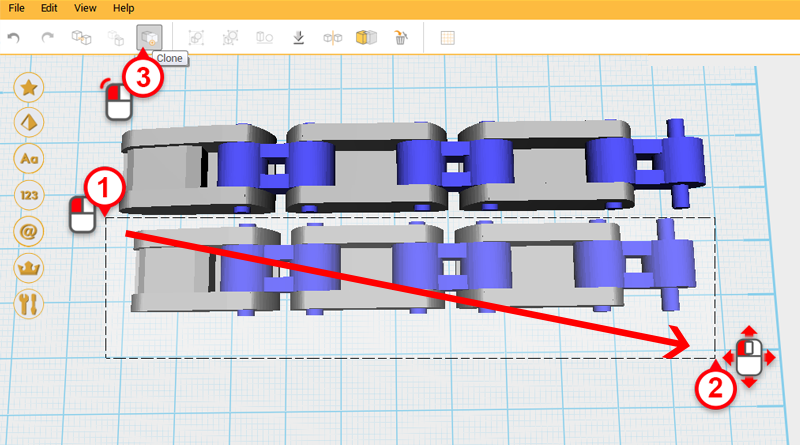
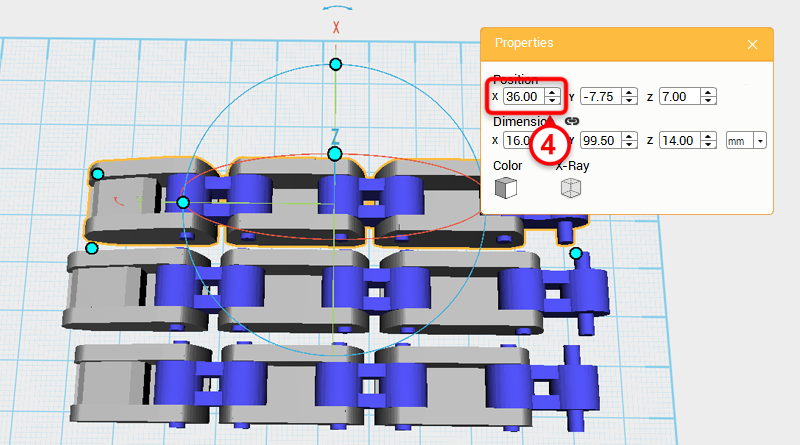 如图框选组成食指的对象,按下﹝Clone﹞按钮,接着将位置的X值设定为36,复制出无名指;由于无名指与食指尺寸相同,因此不需调整尺寸。
如图框选组成食指的对象,按下﹝Clone﹞按钮,接着将位置的X值设定为36,复制出无名指;由于无名指与食指尺寸相同,因此不需调整尺寸。
Tip: 如不小心框选到其他对象,按住键盘的﹝ctrl﹞键再点击一次对象即可减选。
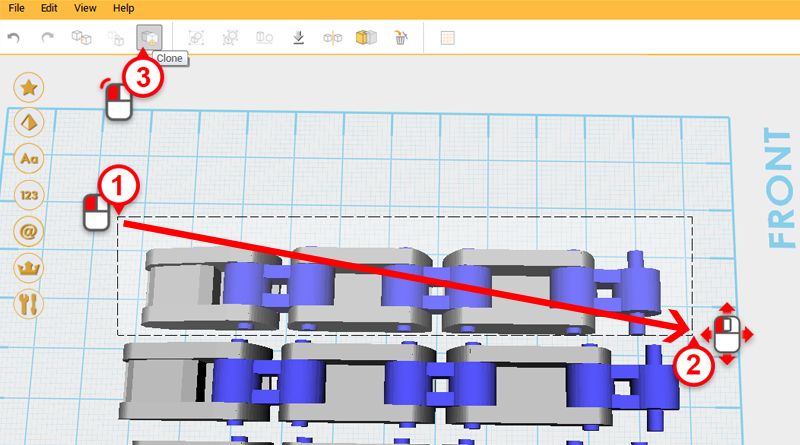
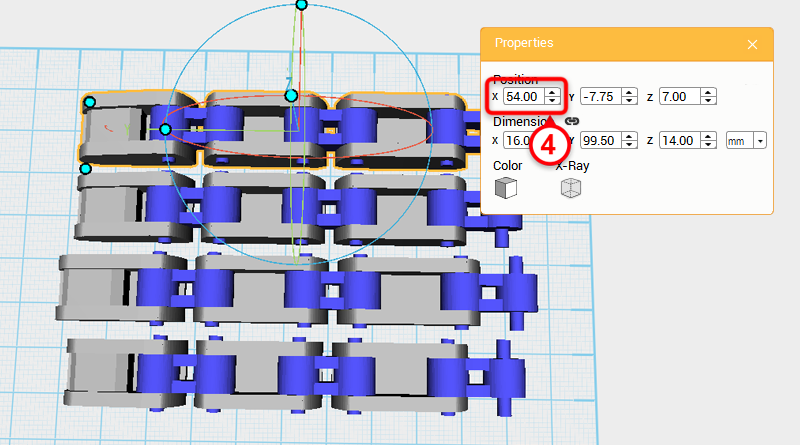 框选组成无名指的对象,按下﹝Clone﹞按钮,接着将位置的X值设定为54,复制出小指。
框选组成无名指的对象,按下﹝Clone﹞按钮,接着将位置的X值设定为54,复制出小指。 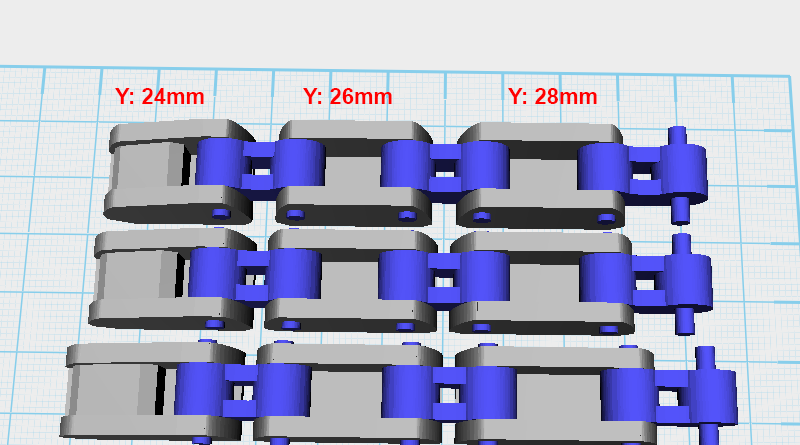 小指的长度较短,因此如图设定指尖与指节对象的尺寸Y值。
小指的长度较短,因此如图设定指尖与指节对象的尺寸Y值。 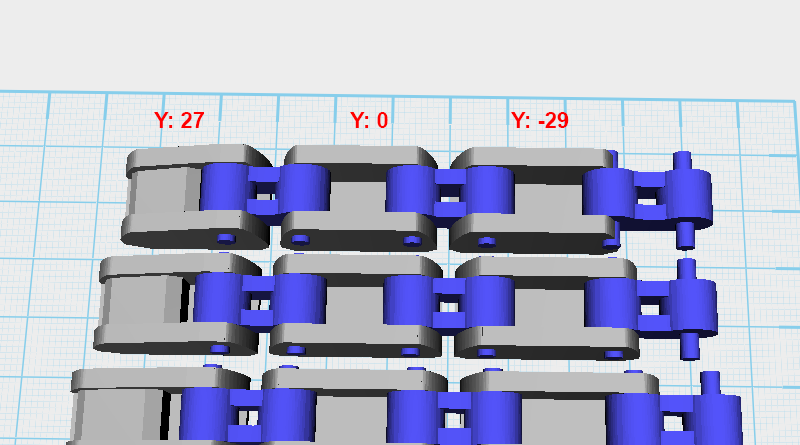 接着调整位置的Y值,让对象的间距保持一致。
接着调整位置的Y值,让对象的间距保持一致。 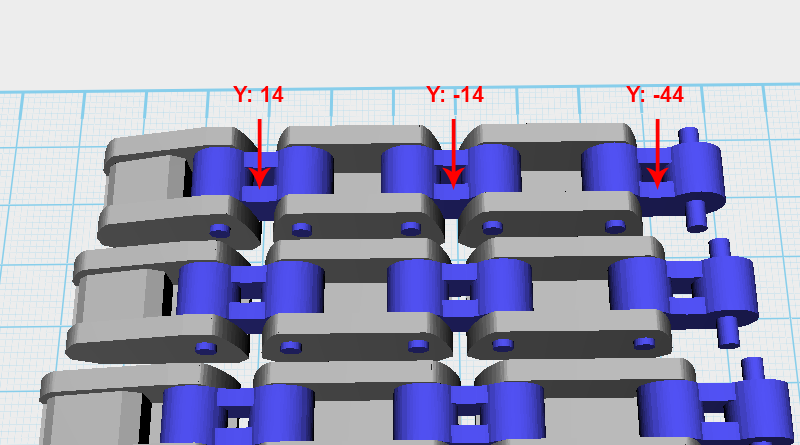 最后如图调整「手指关节」对象的位置Y值。
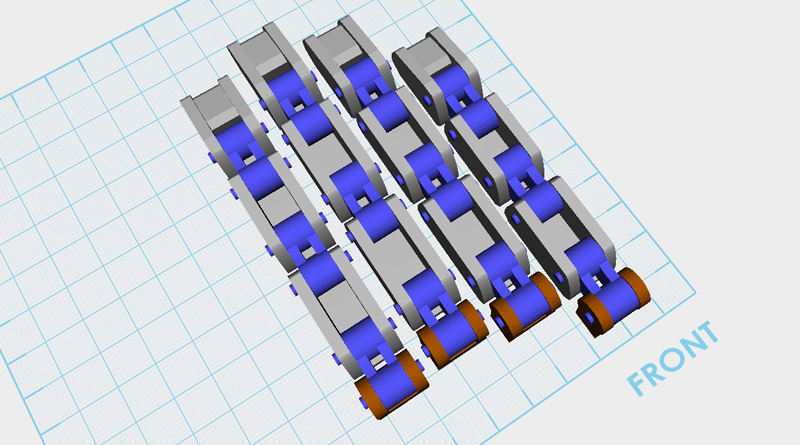
最后如图调整「手指关节」对象的位置Y值。 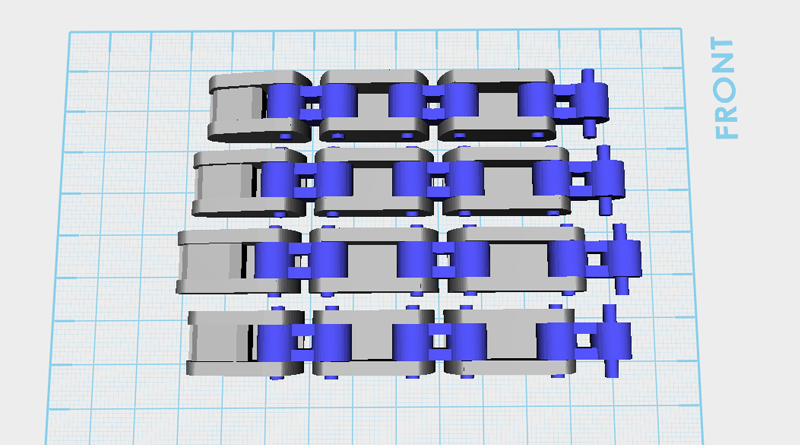 目前阶段完成的模型应如图所示,图中由上到下分别是:小指、无名指、中指、食指。
目前阶段完成的模型应如图所示,图中由上到下分别是:小指、无名指、中指、食指。 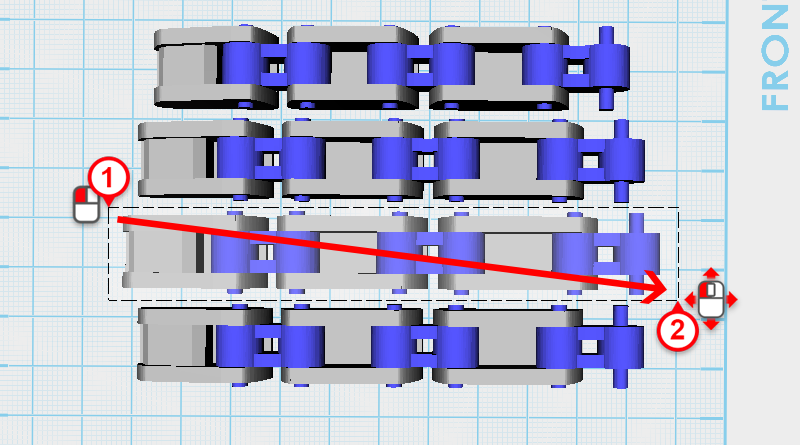
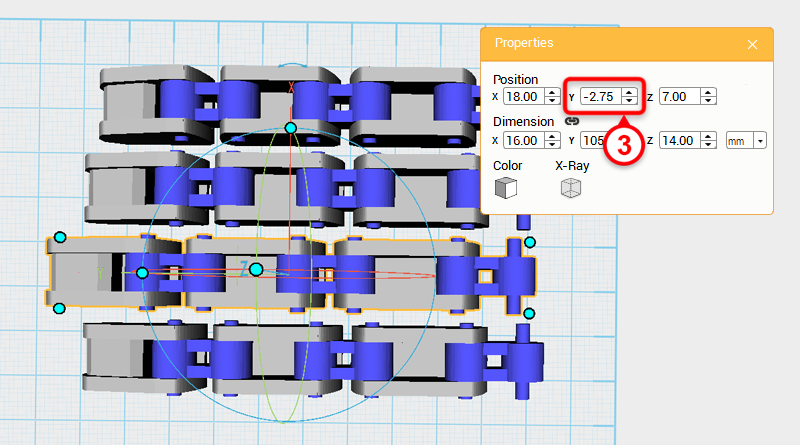 接着要调整每根手指的位置,框选中指,将位置的Y值设定为-2.75。
接着要调整每根手指的位置,框选中指,将位置的Y值设定为-2.75。 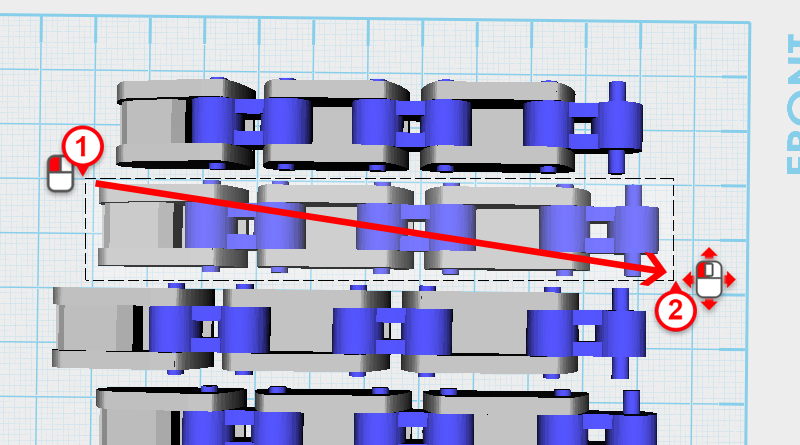
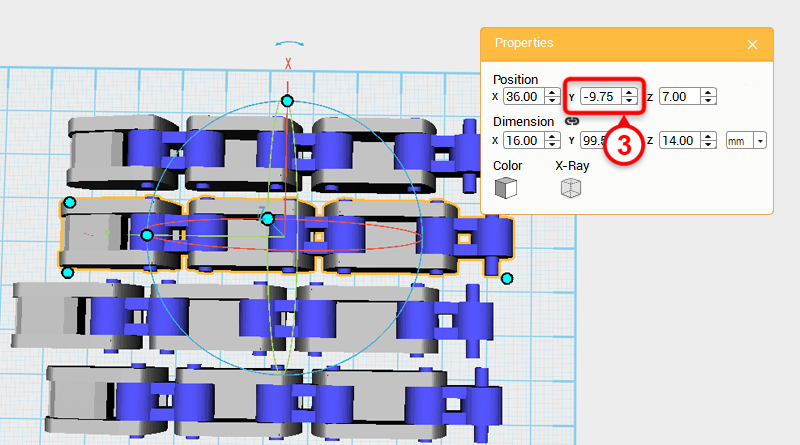 框选无名指,将位置的Y值设定为-9.75。
框选无名指,将位置的Y值设定为-9.75。 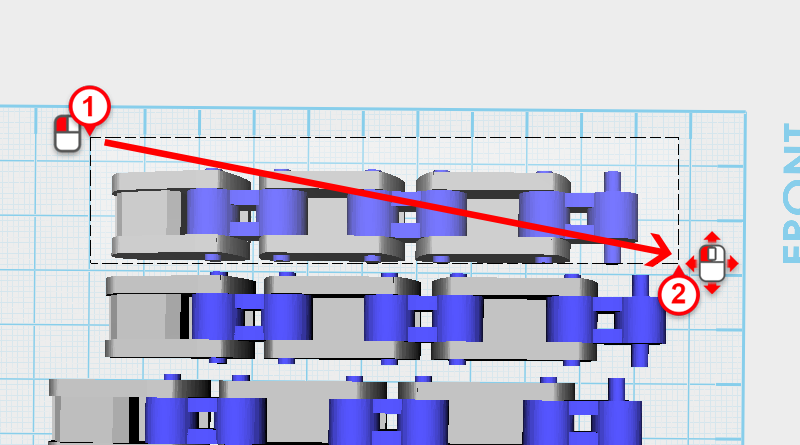
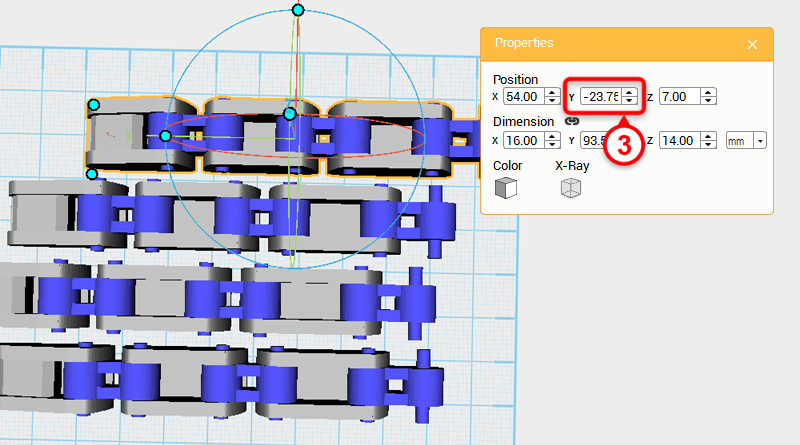 框选小指,将位置的Y值设定为-23.75。
框选小指,将位置的Y值设定为-23.75。 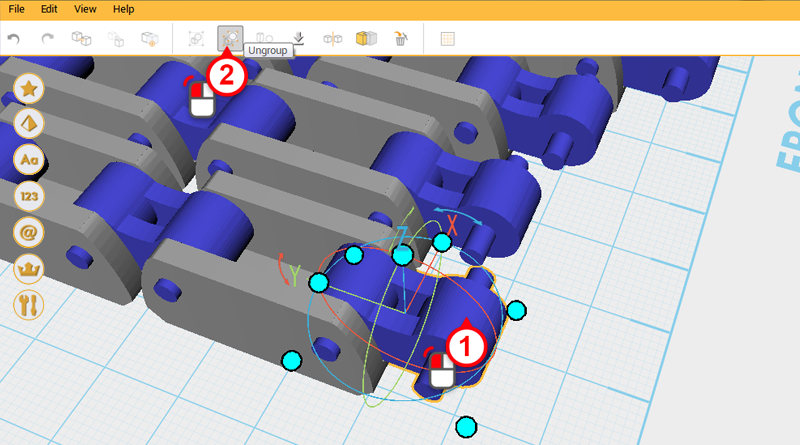 接着要制作手指与手掌连接的关节,首先选取图中的「手指关节」对象,接着按下﹝Ungroup﹞按钮。
接着要制作手指与手掌连接的关节,首先选取图中的「手指关节」对象,接着按下﹝Ungroup﹞按钮。 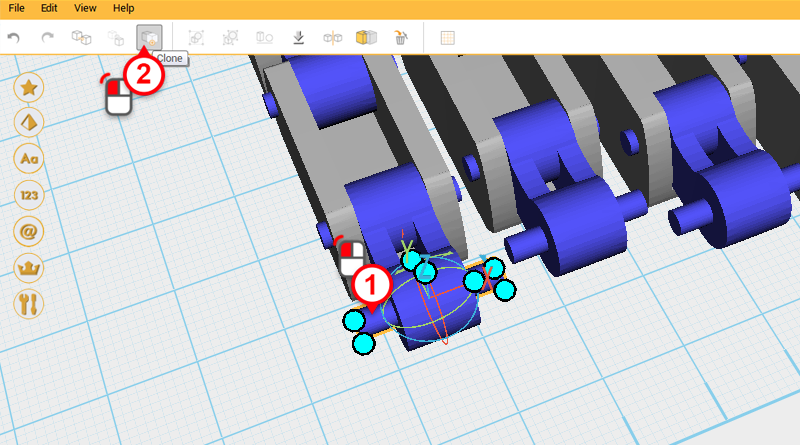
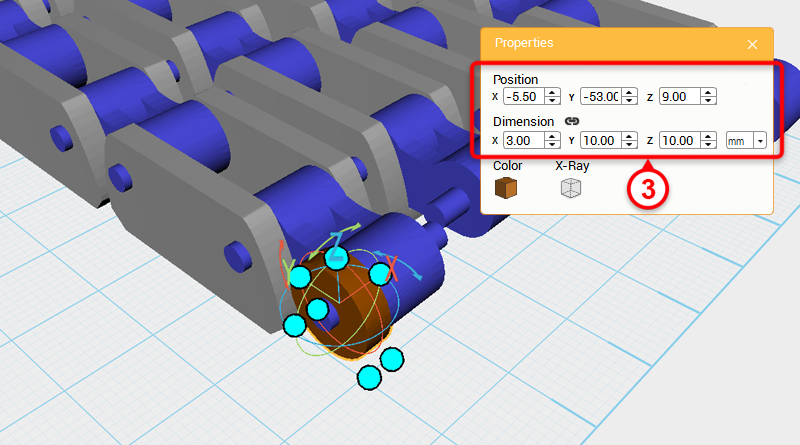 选取图中的﹝Cylinder﹞对象,按下﹝Clone﹞按钮,接着将尺寸设定为X: 3,Y: 10,Z: 10 mm,位置设定为X: -5.5,Y: -53,Z: 9 ,并可更换颜色以方便观察。
选取图中的﹝Cylinder﹞对象,按下﹝Clone﹞按钮,接着将尺寸设定为X: 3,Y: 10,Z: 10 mm,位置设定为X: -5.5,Y: -53,Z: 9 ,并可更换颜色以方便观察。 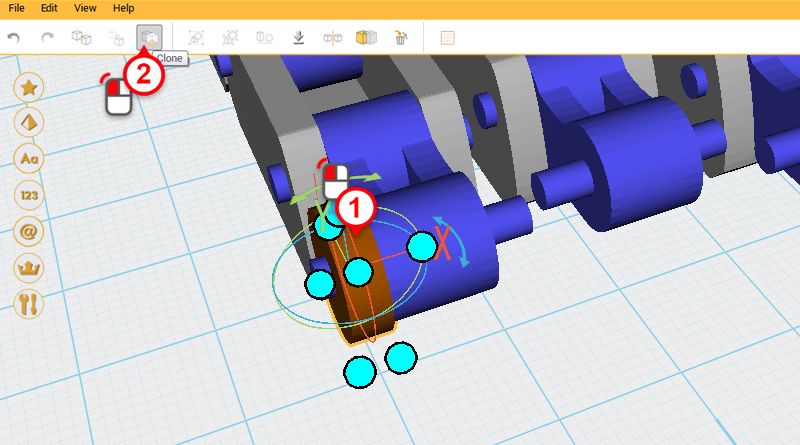
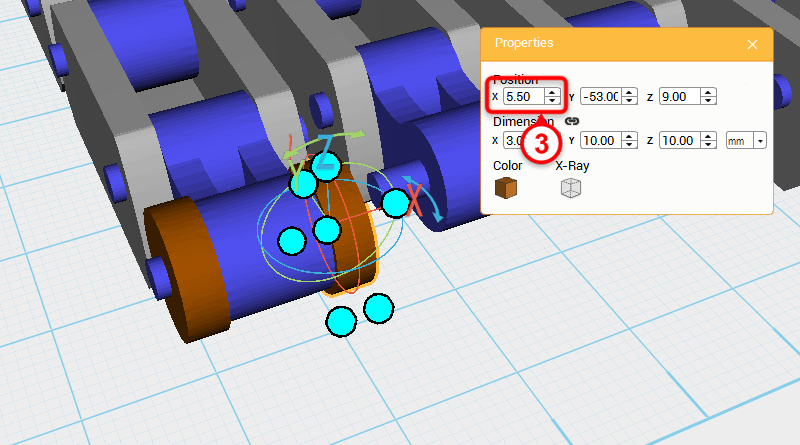 选取图中棕色的﹝Cylinder﹞对象,按下﹝Clone﹞按钮,将位置的X值设定为5.5。
选取图中棕色的﹝Cylinder﹞对象,按下﹝Clone﹞按钮,将位置的X值设定为5.5。 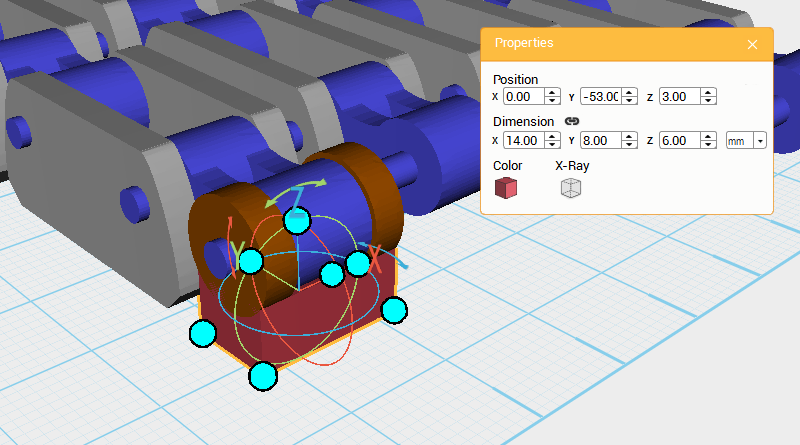 建立一个﹝Cube﹞对象,将尺寸设定为X: 14,Y: 8,Z: 6 mm,位置设定为X: 0,Y: -53,Z: 3。
建立一个﹝Cube﹞对象,将尺寸设定为X: 14,Y: 8,Z: 6 mm,位置设定为X: 0,Y: -53,Z: 3。 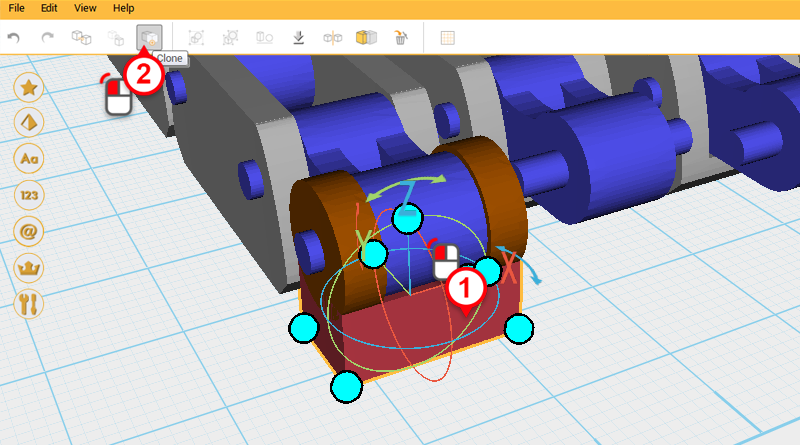
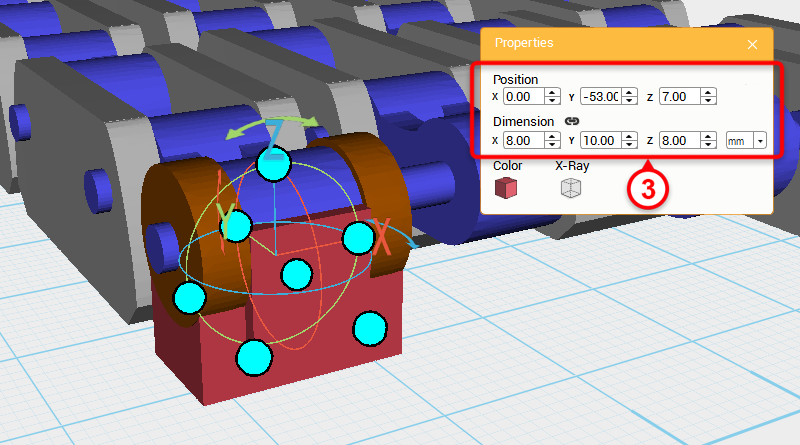 选取刚刚建立的﹝Cube﹞对象,按下﹝Clone﹞按钮,接着将尺寸设定为X: 8,Y: 10,Z: 8 mm,位置设定为X: 0,Y: -53,Z: 7,作为「切削」对象。
选取刚刚建立的﹝Cube﹞对象,按下﹝Clone﹞按钮,接着将尺寸设定为X: 8,Y: 10,Z: 8 mm,位置设定为X: 0,Y: -53,Z: 7,作为「切削」对象。 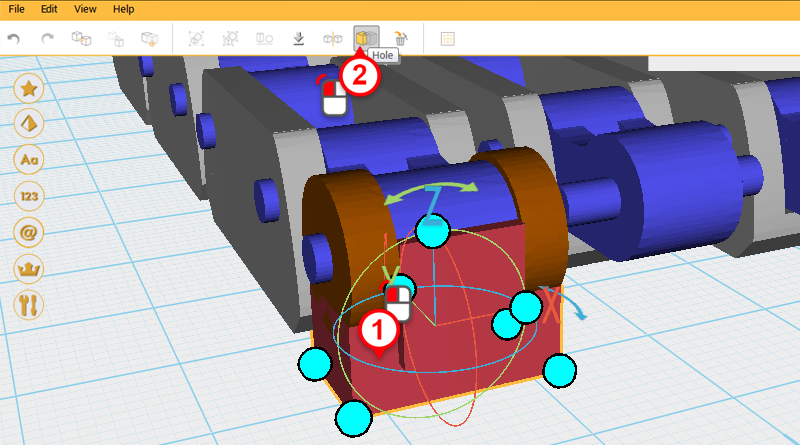 选取下方的﹝Cube﹞对象,按下﹝Home﹞按钮。
选取下方的﹝Cube﹞对象,按下﹝Home﹞按钮。 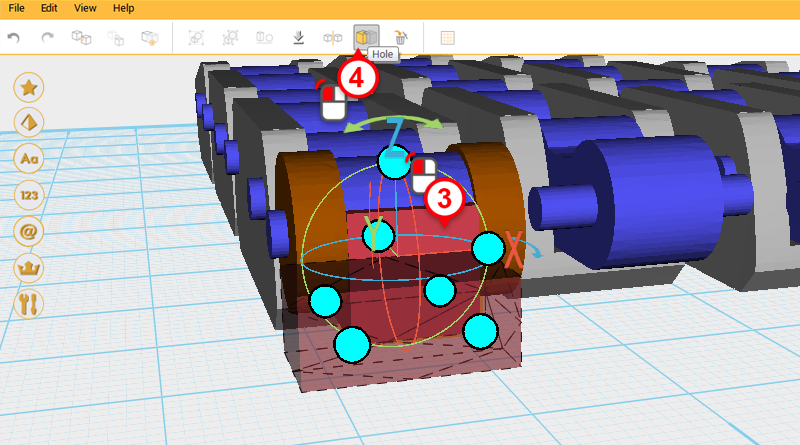
 选取「切削」对象,再次按下﹝Home﹞按钮,切削出可供关节旋转的空间。
选取「切削」对象,再次按下﹝Home﹞按钮,切削出可供关节旋转的空间。 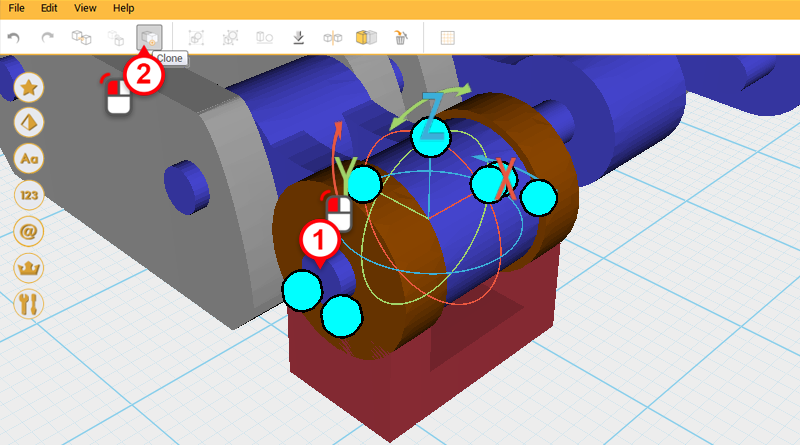 选取图中的蓝色﹝Cylinder﹞对象,按下﹝Clone﹞按钮。
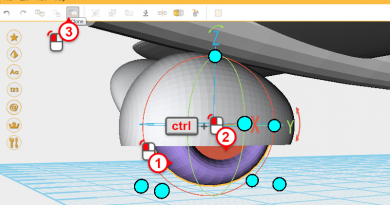
选取图中的蓝色﹝Cylinder﹞对象,按下﹝Clone﹞按钮。 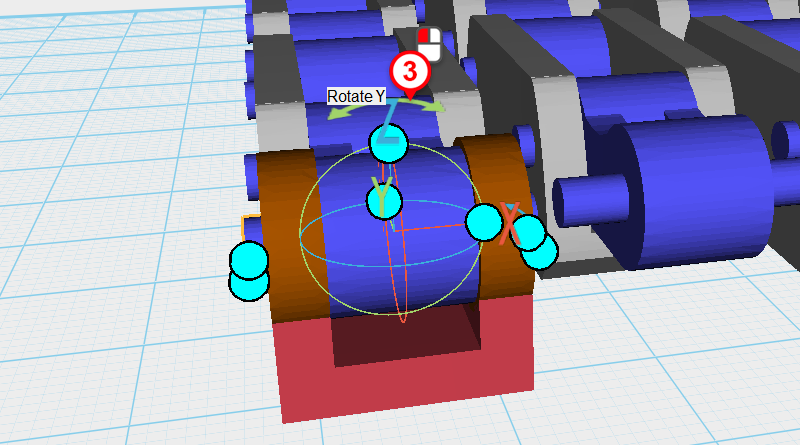
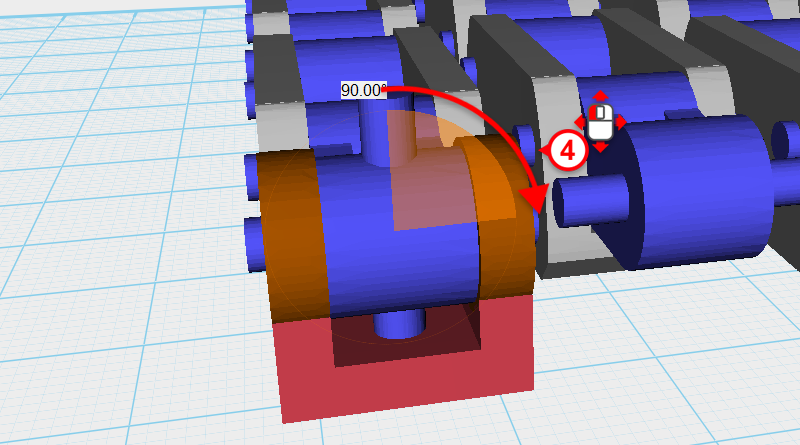 接着按住控制器中Z字母上方的箭头,拖曳滑鼠直到旋转数值显示为90度。
接着按住控制器中Z字母上方的箭头,拖曳滑鼠直到旋转数值显示为90度。 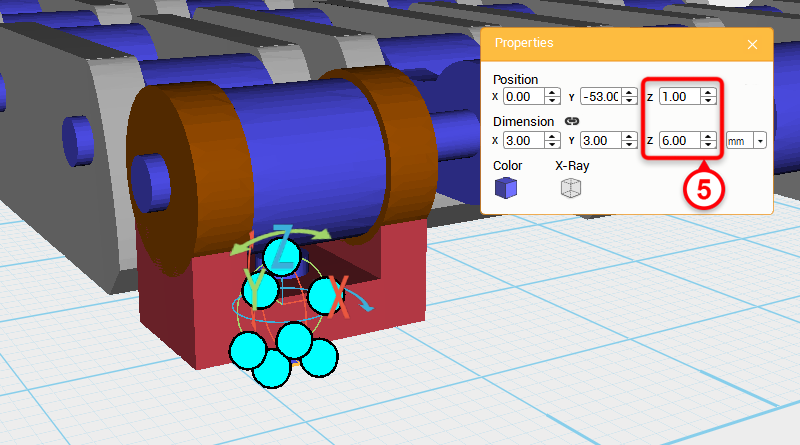 最后将尺寸的Z值设定为6mm,位置的Z值设定为1,当作转轴的定位点。
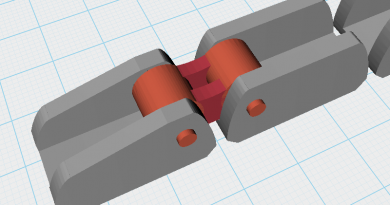
最后将尺寸的Z值设定为6mm,位置的Z值设定为1,当作转轴的定位点。 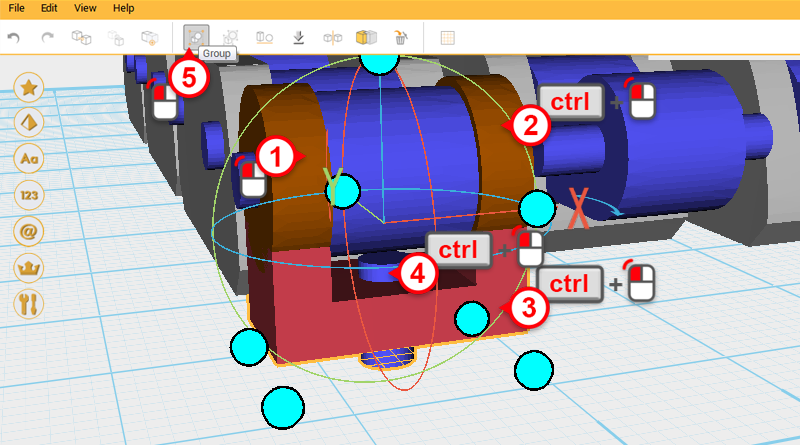 选取图中的四个对象,按下﹝Group﹞按钮,完成「指根关节」对象。
选取图中的四个对象,按下﹝Group﹞按钮,完成「指根关节」对象。 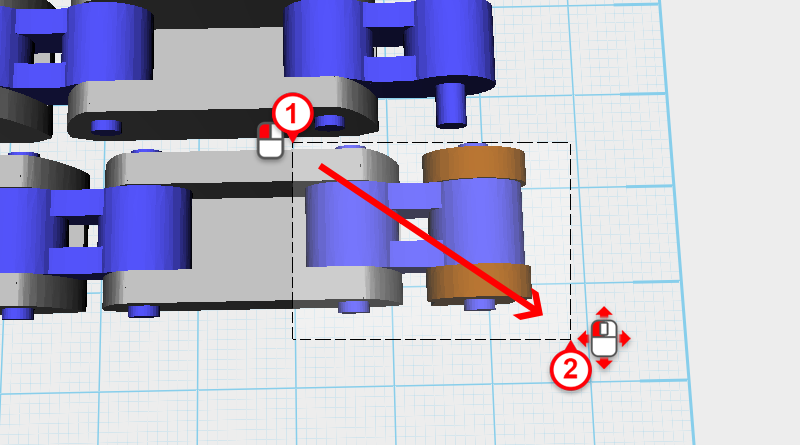
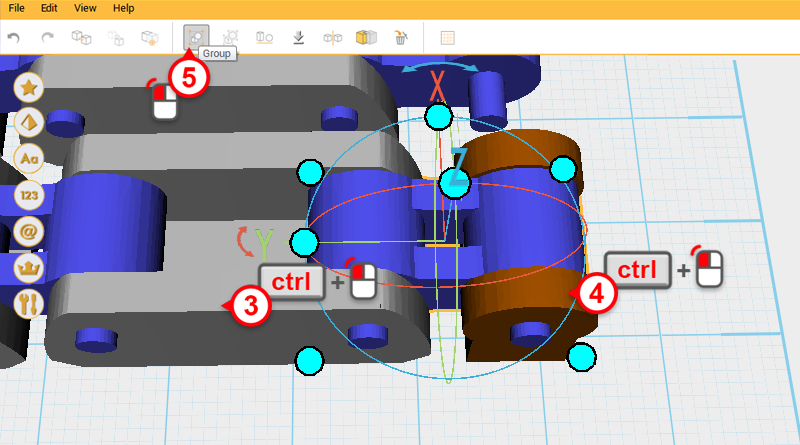 框选图中的对象,接着按键盘的﹝ctrl﹞键,点击减选「指节B」与「指根关节」对象,最后按下﹝Group﹞按钮,将「手指关节」对象恢复成群组。
框选图中的对象,接着按键盘的﹝ctrl﹞键,点击减选「指节B」与「指根关节」对象,最后按下﹝Group﹞按钮,将「手指关节」对象恢复成群组。 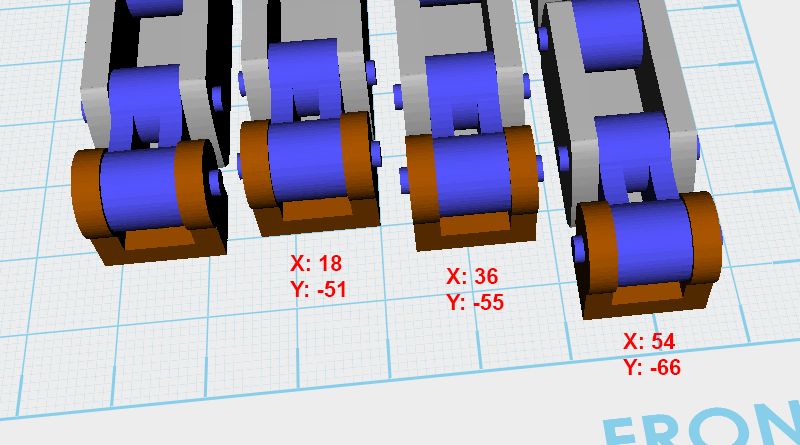 将「指根关节」对象拷贝三次,并如图所示设定位置的X值与Y值。
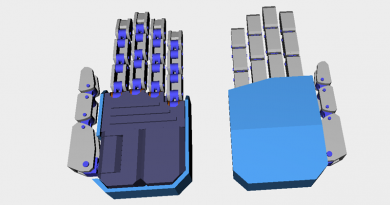
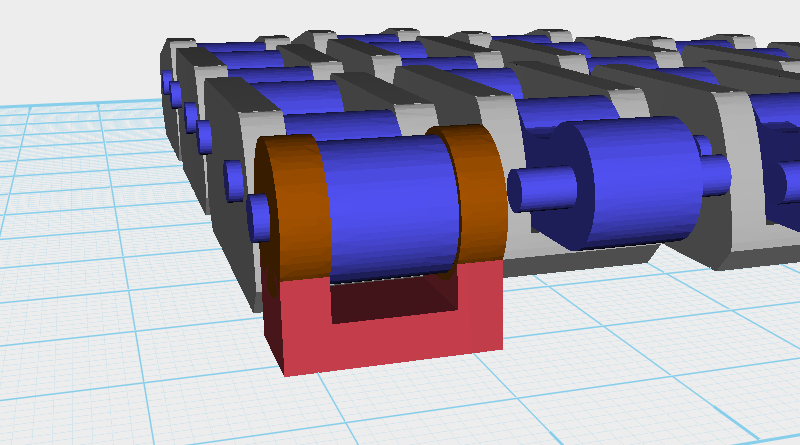
将「指根关节」对象拷贝三次,并如图所示设定位置的X值与Y值。 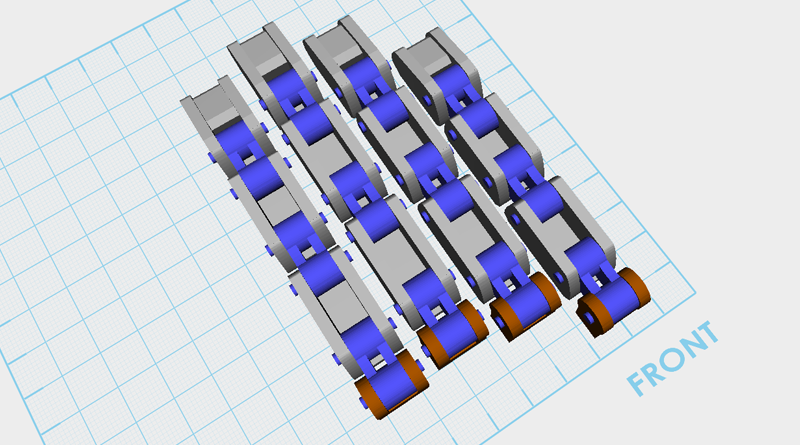 目前阶段完成的模型应如图所示。
目前阶段完成的模型应如图所示。