XYZmaker建模教学 – 机械手PART3
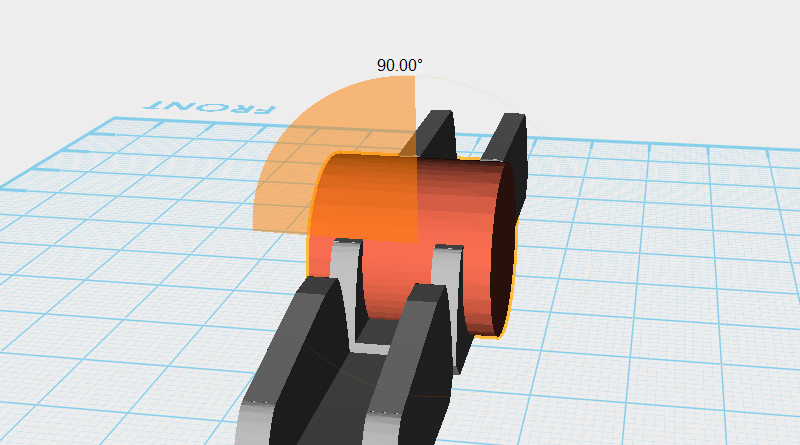
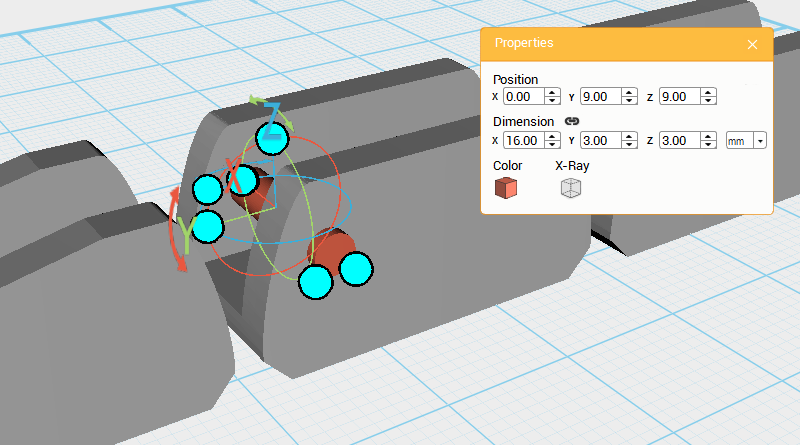 建立一个﹝Cylinder﹞对象,对Y轴旋转90度后,将尺寸设定为X: 16,Y: 3,Z: 3 mm,位置设定为X: 0,Y: 9,Z: 9,当作转轴的定位点。
建立一个﹝Cylinder﹞对象,对Y轴旋转90度后,将尺寸设定为X: 16,Y: 3,Z: 3 mm,位置设定为X: 0,Y: 9,Z: 9,当作转轴的定位点。 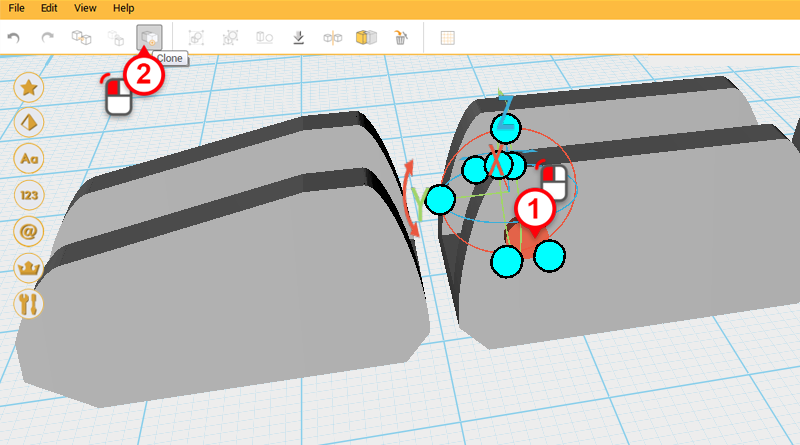
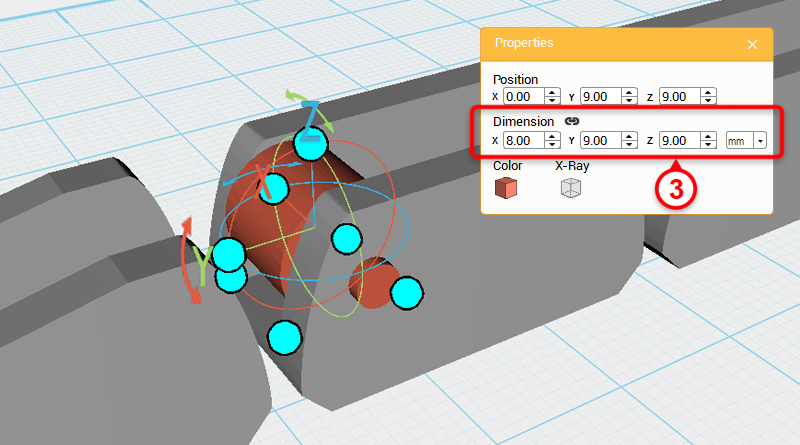 选取刚刚建立的﹝Cylinder﹞对象,按下﹝Clone﹞按钮,将复制出的﹝Cylinder﹞尺寸设定为X: 8,Y: 9,Z: 9 mm。
选取刚刚建立的﹝Cylinder﹞对象,按下﹝Clone﹞按钮,将复制出的﹝Cylinder﹞尺寸设定为X: 8,Y: 9,Z: 9 mm。 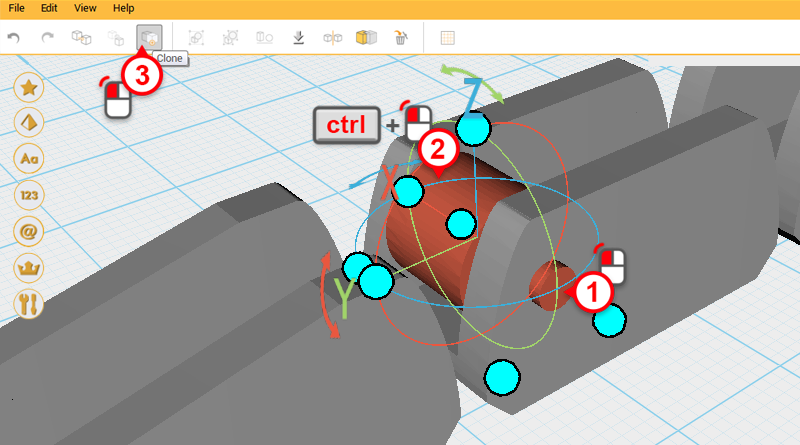
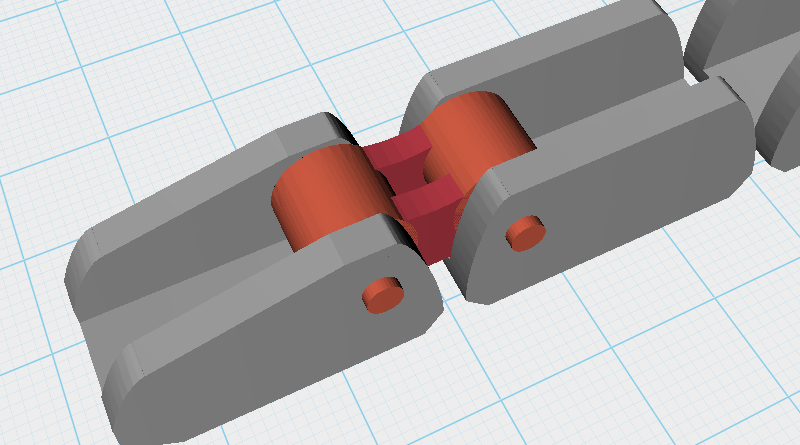
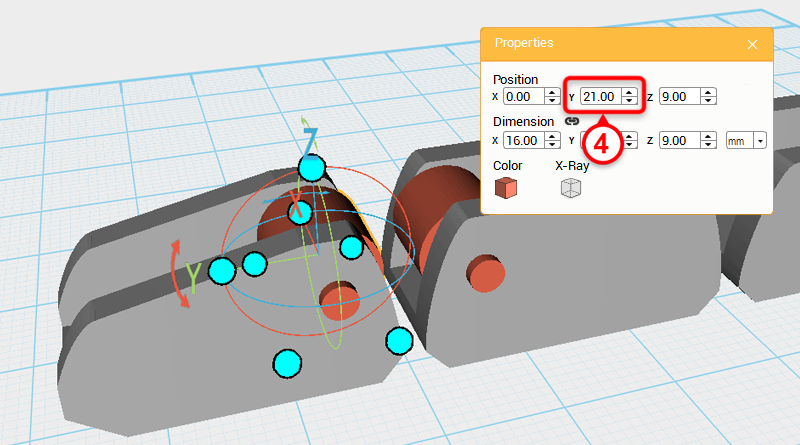 选取图中所示的两个﹝Cylinder﹞对象,按下﹝Clone﹞按钮,接着将位置的Y值设定为21。
选取图中所示的两个﹝Cylinder﹞对象,按下﹝Clone﹞按钮,接着将位置的Y值设定为21。 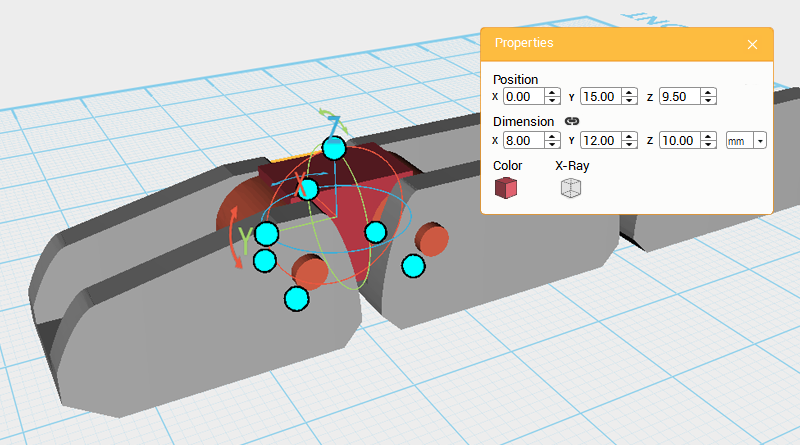 建立一个﹝Cube﹞对象,将尺寸设定为X: 8,Y: 12,Z: 10 mm,位置设定为X: 0,Y: 15,Z: 9.5。
建立一个﹝Cube﹞对象,将尺寸设定为X: 8,Y: 12,Z: 10 mm,位置设定为X: 0,Y: 15,Z: 9.5。 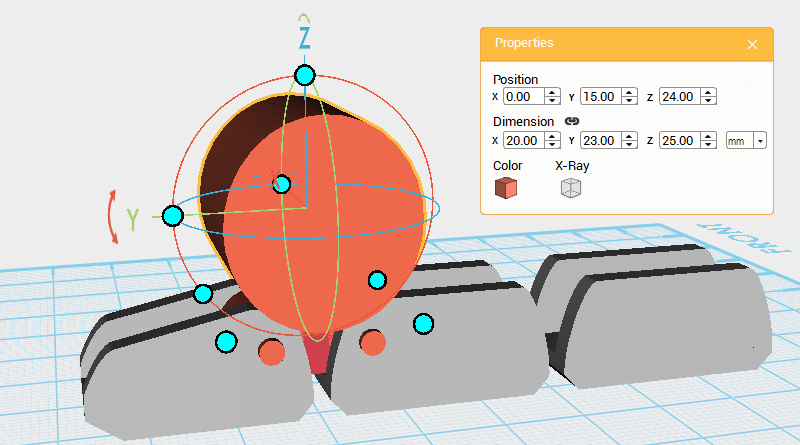 建立一个﹝Cylinder﹞对象,对Y轴旋转90度后,将尺寸设定为X: 20,Y: 23,Z: 25 mm,位置设定为X: 0,Y: 15,Z: 24。
建立一个﹝Cylinder﹞对象,对Y轴旋转90度后,将尺寸设定为X: 20,Y: 23,Z: 25 mm,位置设定为X: 0,Y: 15,Z: 24。 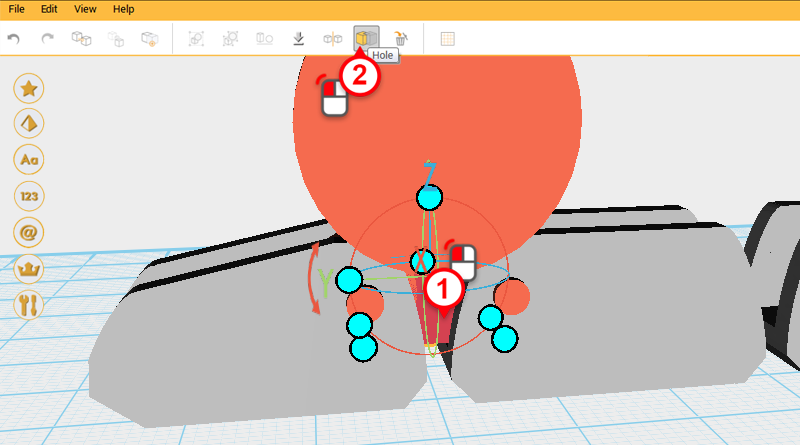 选取﹝Cube﹞对象,按下﹝Home﹞按钮。
选取﹝Cube﹞对象,按下﹝Home﹞按钮。 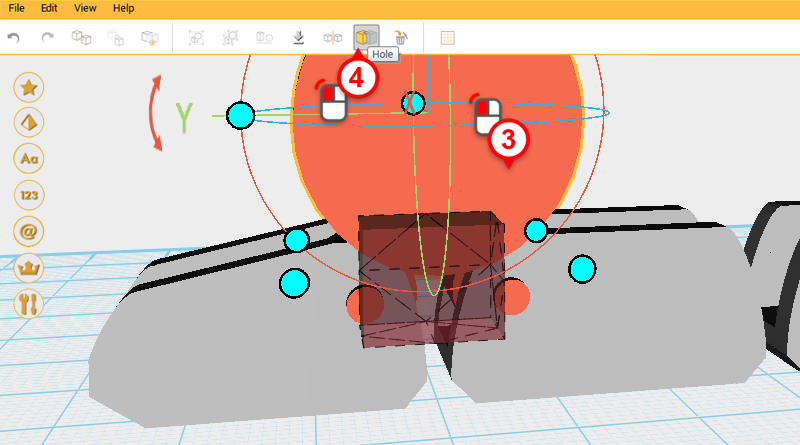
 选取﹝Cylinder﹞对象,再次按下﹝Home﹞按钮。
选取﹝Cylinder﹞对象,再次按下﹝Home﹞按钮。 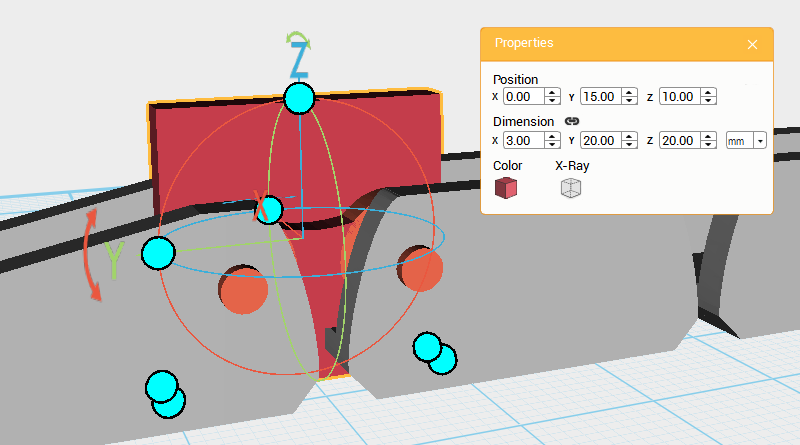 建立一个﹝Cube﹞对象并如图所示设定尺寸与位置。
建立一个﹝Cube﹞对象并如图所示设定尺寸与位置。  接着利用﹝Hole﹞功能将图中的﹝Cube﹞对象挖空以增加模型的精致度。
接着利用﹝Hole﹞功能将图中的﹝Cube﹞对象挖空以增加模型的精致度。 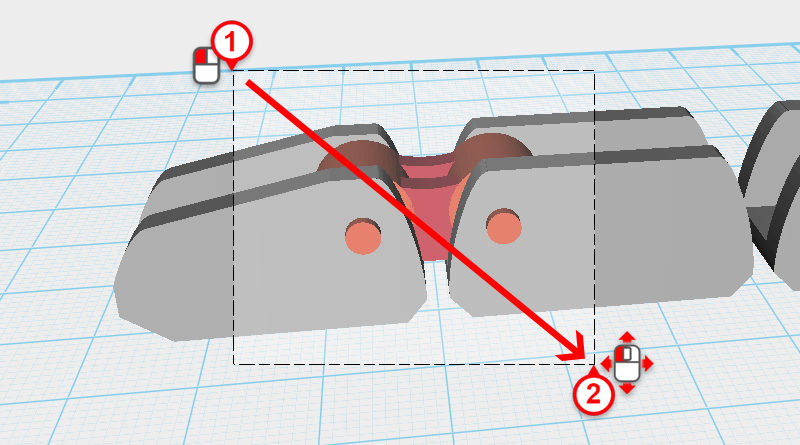
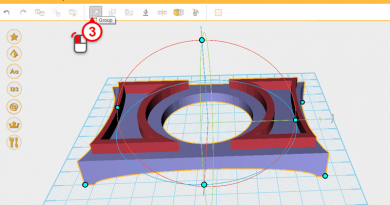
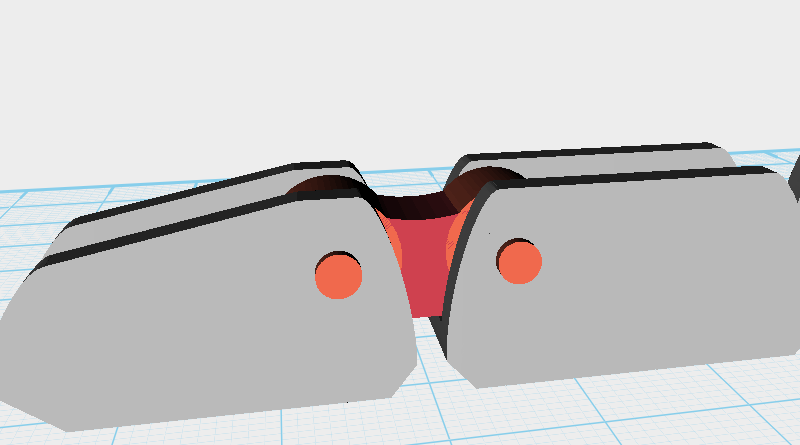
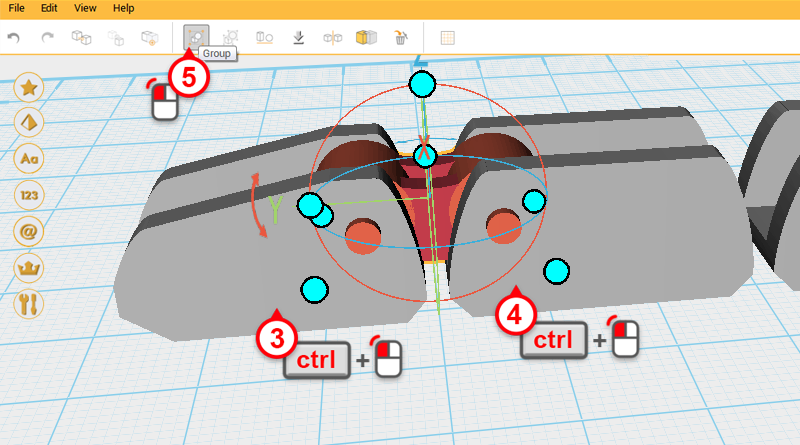 如图框选对象,接着按键盘的﹝ctrl﹞键再点击减选「指尖」对象、「指节A」对象,最后按下﹝Group﹞按钮,完成「手指关节」对象。
如图框选对象,接着按键盘的﹝ctrl﹞键再点击减选「指尖」对象、「指节A」对象,最后按下﹝Group﹞按钮,完成「手指关节」对象。 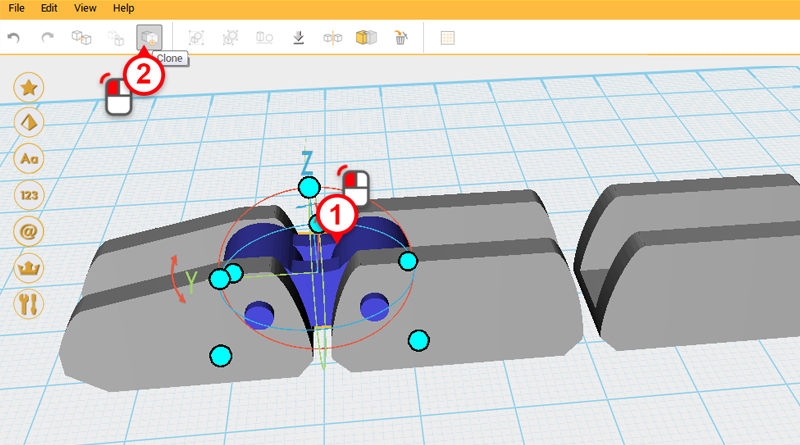
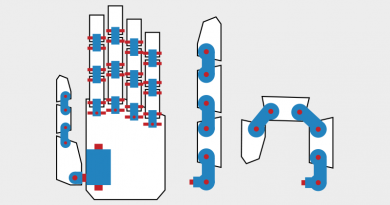
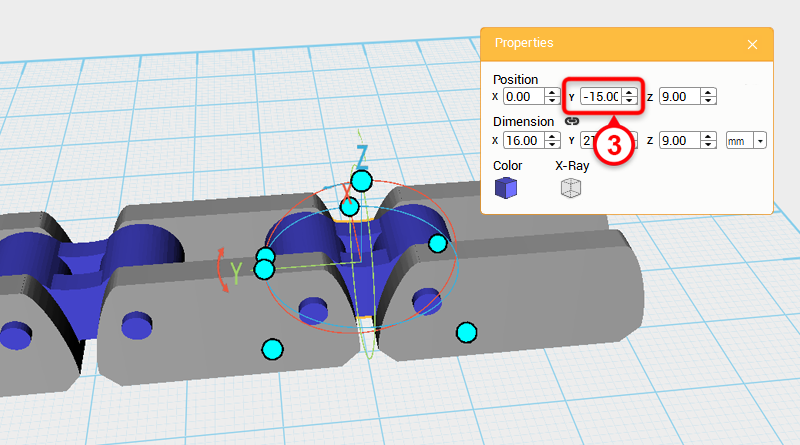 选取「手指关节」对象,按下﹝Clone﹞按钮,接着将位置的Y值设定为-15。
选取「手指关节」对象,按下﹝Clone﹞按钮,接着将位置的Y值设定为-15。 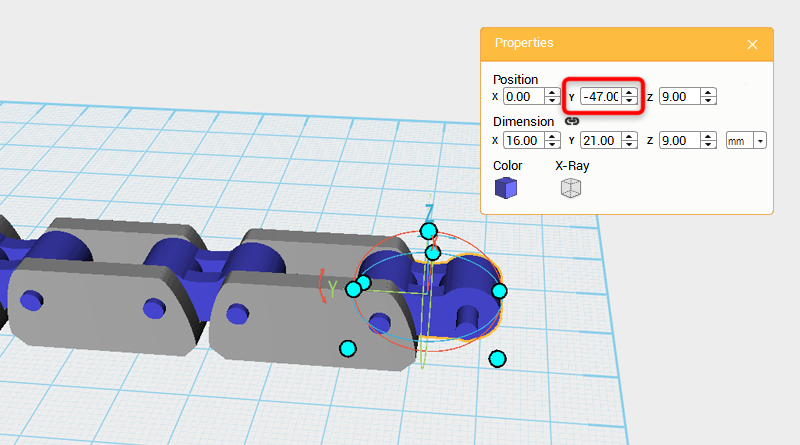 重复上面的步骤,再次拷贝一个「手指关节」对象,并将位置的Y值设定为-47。
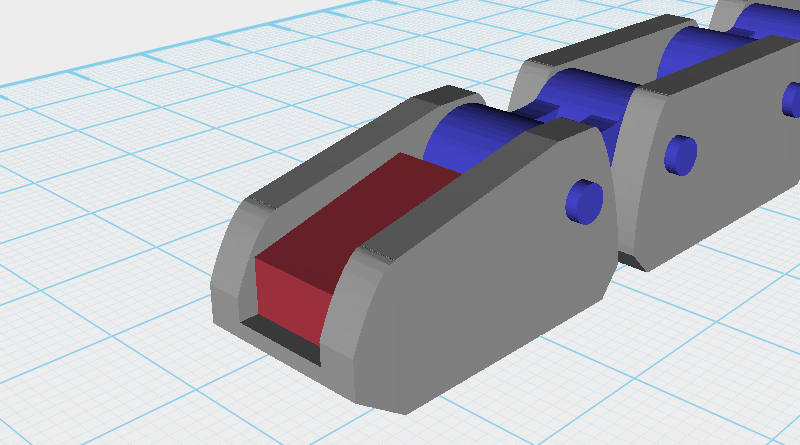
重复上面的步骤,再次拷贝一个「手指关节」对象,并将位置的Y值设定为-47。 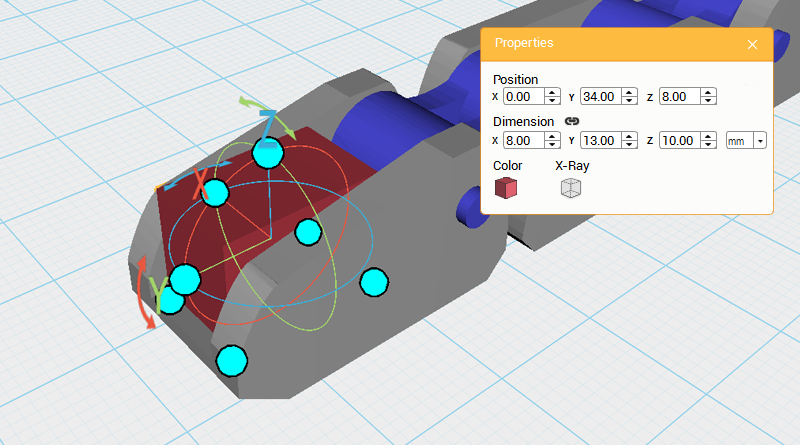 检视目前完成的模型,发现指尖太过空洞,因此接着要制作指尖内部的结构。建立一个﹝Cube﹞对象,将尺寸设定为X: 8,Y: 13,Z: 10 mm,位置设定为X: 0,Y: 34,Z: 8。
检视目前完成的模型,发现指尖太过空洞,因此接着要制作指尖内部的结构。建立一个﹝Cube﹞对象,将尺寸设定为X: 8,Y: 13,Z: 10 mm,位置设定为X: 0,Y: 34,Z: 8。 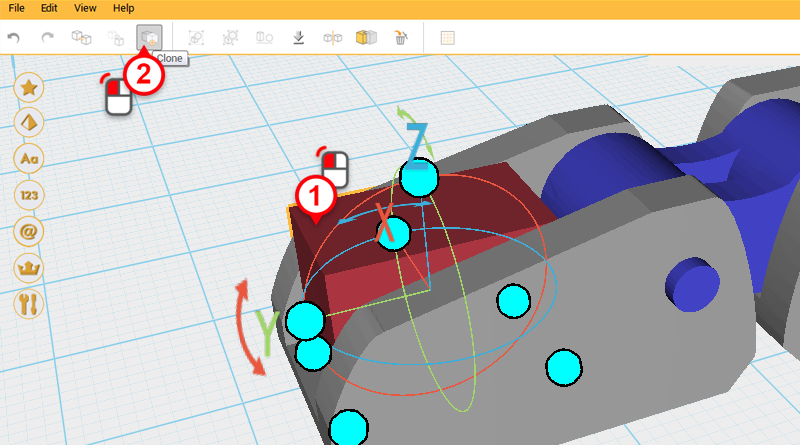
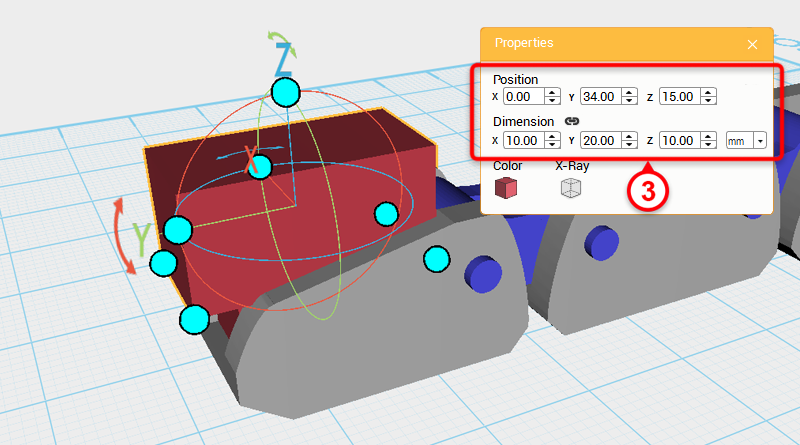 选取﹝Cube﹞对象,按下﹝Clone﹞按钮。接着将尺寸设定为X: 10,Y: 20,Z: 10 mm,位置设定为X: 0,Y: 34,Z: 15,作为「切削」对象。
选取﹝Cube﹞对象,按下﹝Clone﹞按钮。接着将尺寸设定为X: 10,Y: 20,Z: 10 mm,位置设定为X: 0,Y: 34,Z: 15,作为「切削」对象。 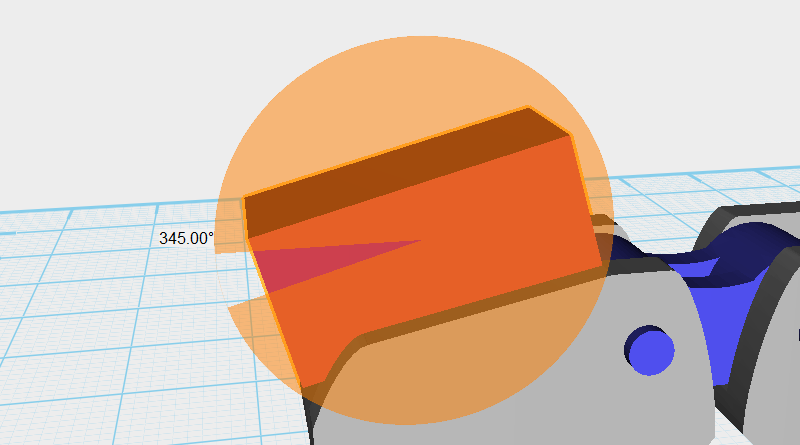 选取「切削」对象,并如图所示对X轴作旋转。
选取「切削」对象,并如图所示对X轴作旋转。 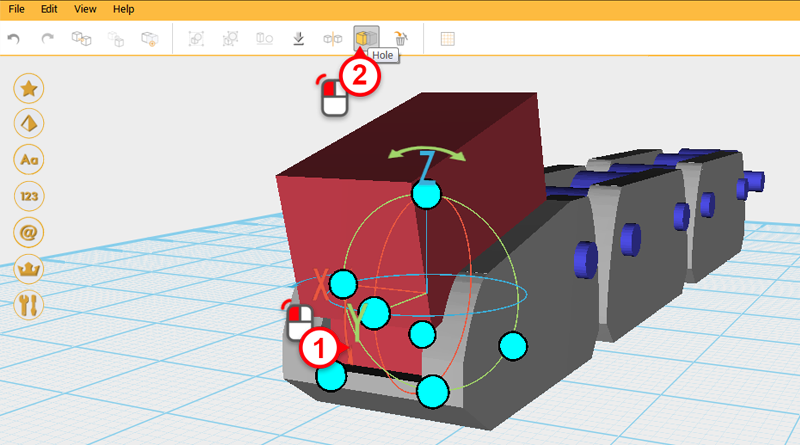
 利用「切削」对象与﹝Hole﹞功能,将﹝Cube﹞对象切削出如图的斜边。
利用「切削」对象与﹝Hole﹞功能,将﹝Cube﹞对象切削出如图的斜边。 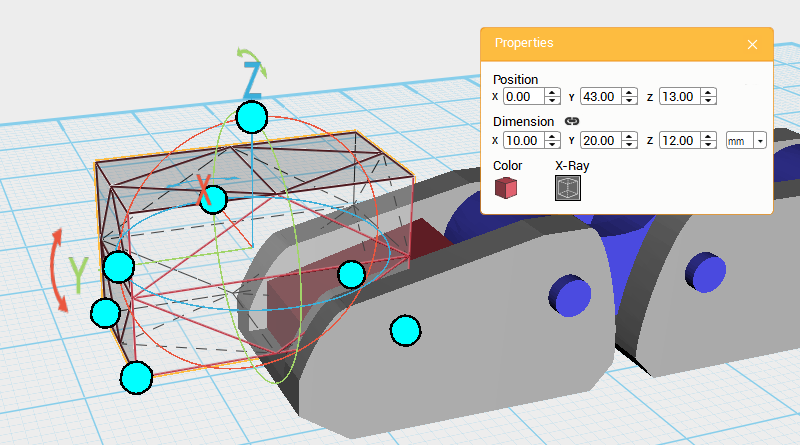 建立一个﹝Cube﹞对象,将尺寸设定为X: 10,Y: 20,Z: 12 mm,位置设定为X: 0,Y: 43,Z: 13,作为「切削」对象。
建立一个﹝Cube﹞对象,将尺寸设定为X: 10,Y: 20,Z: 12 mm,位置设定为X: 0,Y: 43,Z: 13,作为「切削」对象。 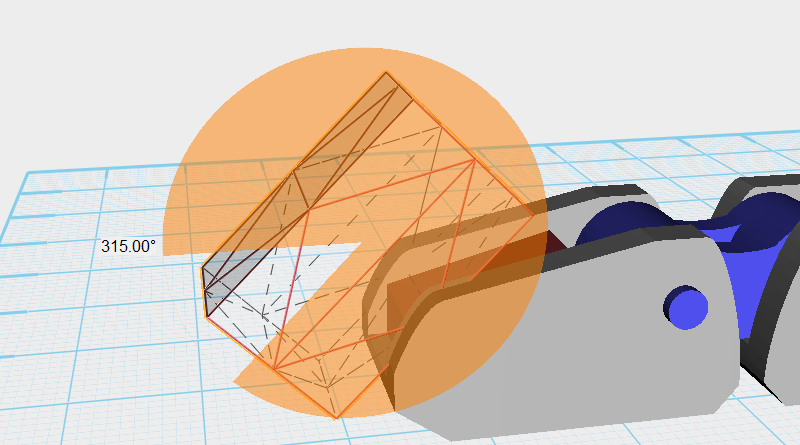 选取「切削」对象,并如图所示对X轴作旋转。
选取「切削」对象,并如图所示对X轴作旋转。 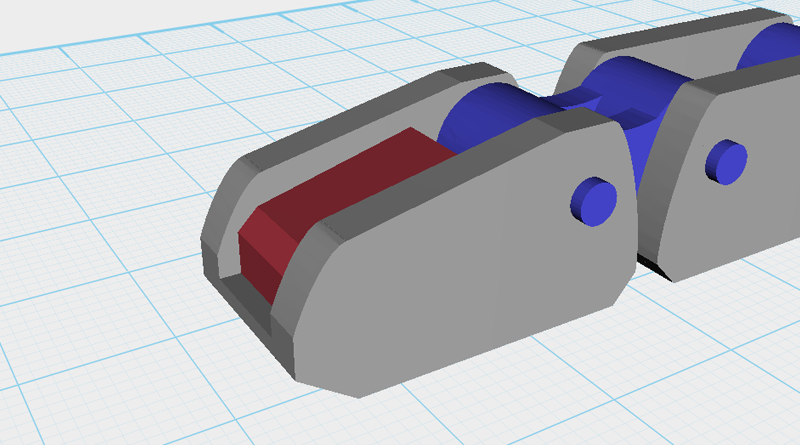 利用「切削」对象与﹝Hole﹞功能,将﹝Cube﹞对象切削出如图的斜边。
利用「切削」对象与﹝Hole﹞功能,将﹝Cube﹞对象切削出如图的斜边。 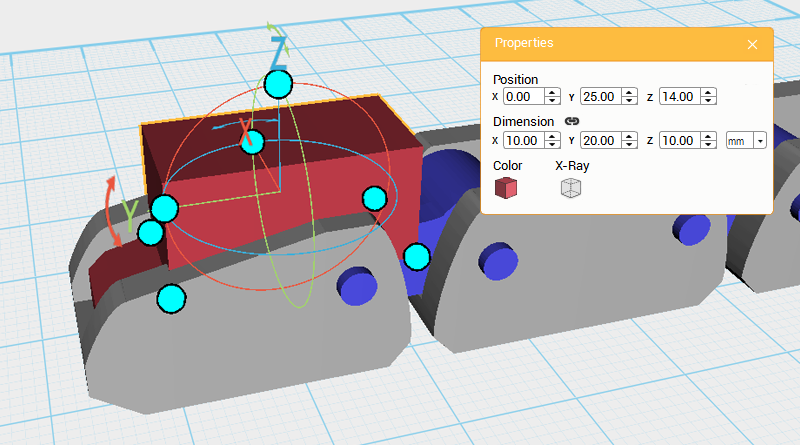 建立一个﹝Cube﹞对象,将尺寸设定为X: 10,Y: 20,Z: 10 mm,位置设定为X: 0,Y: 25,Z: 14,作为「切削」对象。
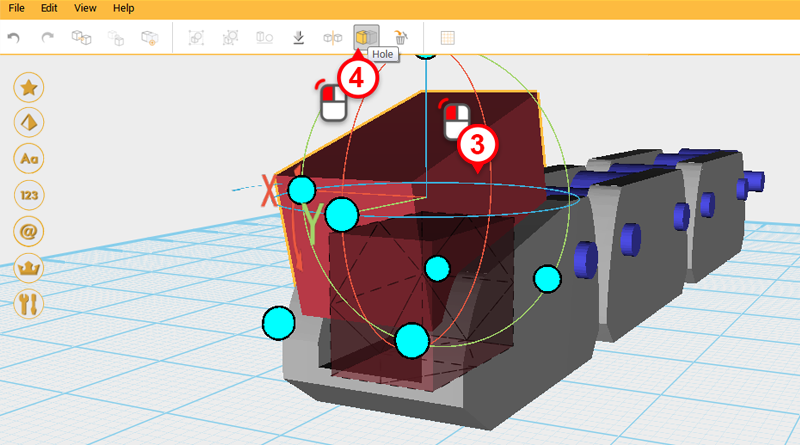
建立一个﹝Cube﹞对象,将尺寸设定为X: 10,Y: 20,Z: 10 mm,位置设定为X: 0,Y: 25,Z: 14,作为「切削」对象。 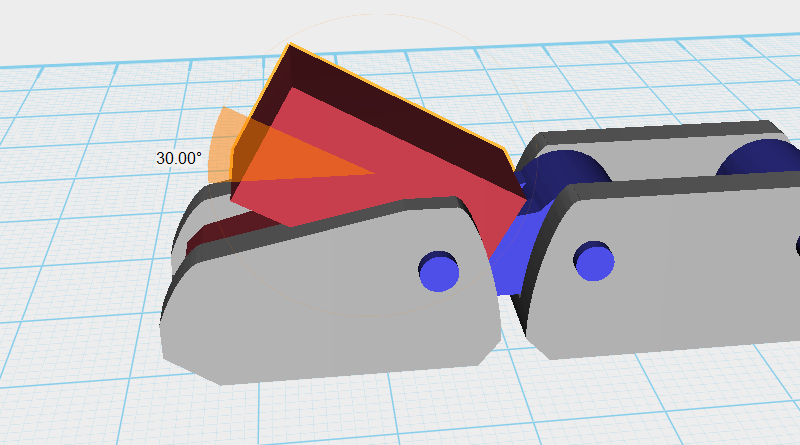 选取「切削」对象,并如图所示对X轴作旋转。
选取「切削」对象,并如图所示对X轴作旋转。 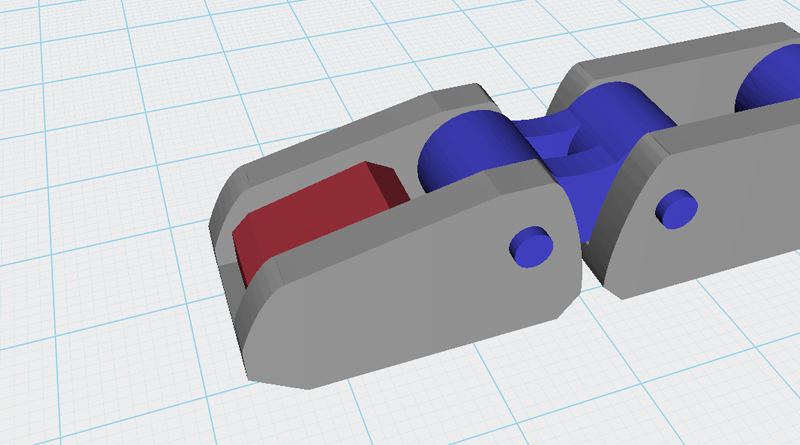 利用「切削」对象与﹝Hole﹞功能,将﹝Cube﹞对象切削出如图的斜边。
利用「切削」对象与﹝Hole﹞功能,将﹝Cube﹞对象切削出如图的斜边。 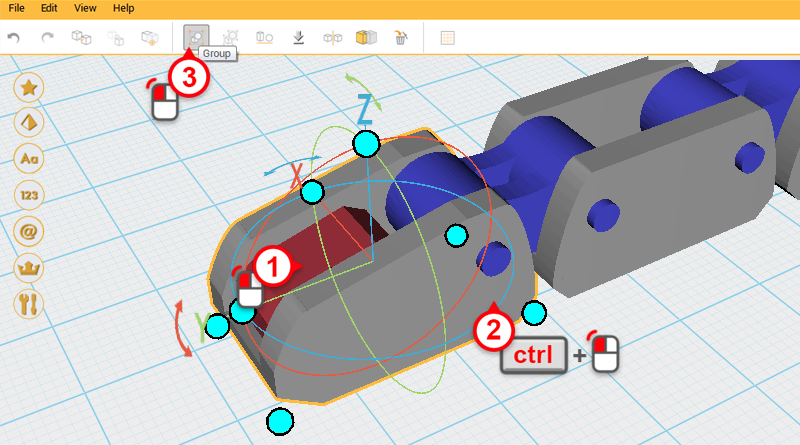 选取「指尖」对象与切削完成的﹝Cube﹞对象,按下﹝Group﹞按钮。
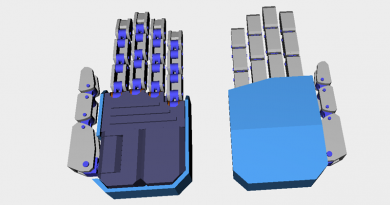
选取「指尖」对象与切削完成的﹝Cube﹞对象,按下﹝Group﹞按钮。 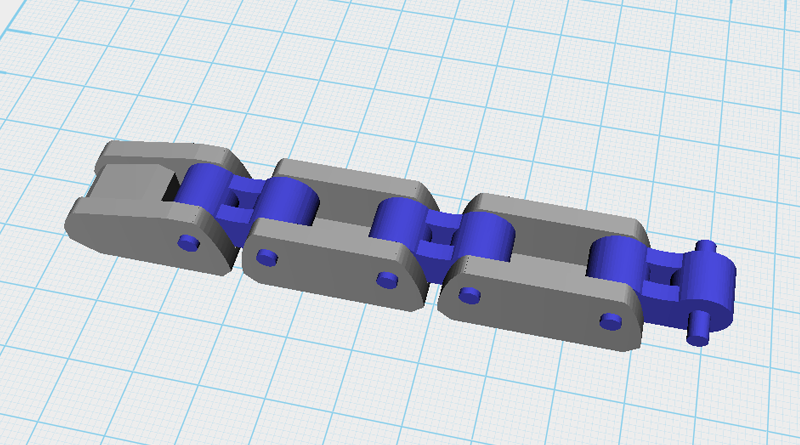 目前完成的手指模型应如图所示,将其作为食指,接下来就可以此作为基础来制作其余的手指模型。
目前完成的手指模型应如图所示,将其作为食指,接下来就可以此作为基础来制作其余的手指模型。