XYZmaker建模教学 – 机械手PART1
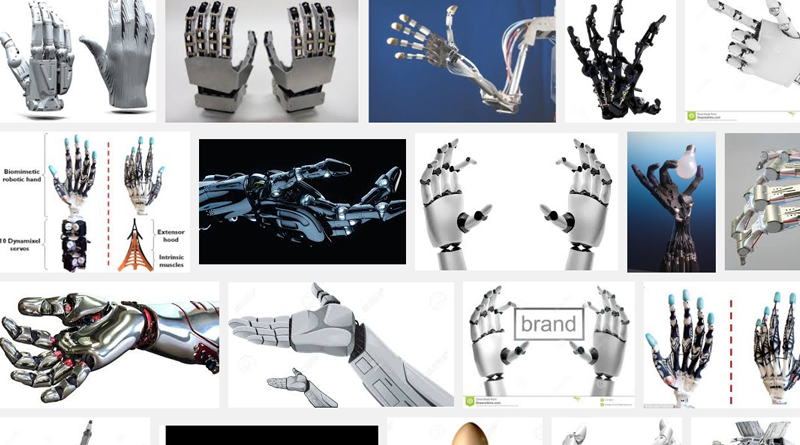 本篇教学是在XYZmaker中,利用基本的几何3D模型,加以组合编辑后,建立一个机械风格手掌的模型,并具有如同真实手掌般的活动关节。 首先收集相关参考图片,参考各类型机械手掌的设计。
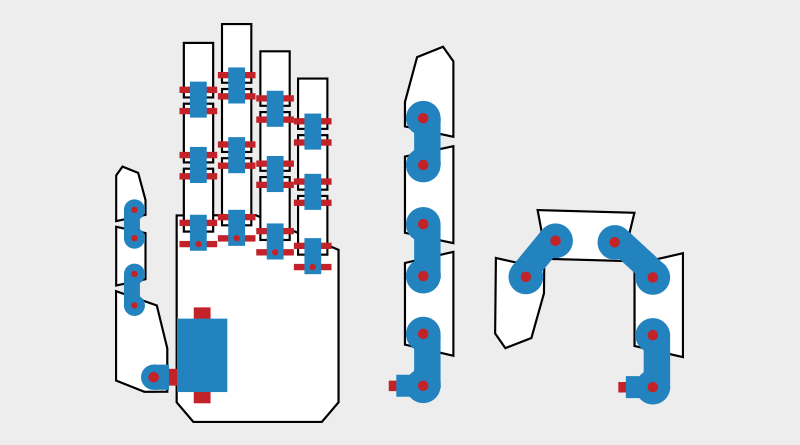
本篇教学是在XYZmaker中,利用基本的几何3D模型,加以组合编辑后,建立一个机械风格手掌的模型,并具有如同真实手掌般的活动关节。 首先收集相关参考图片,参考各类型机械手掌的设计。 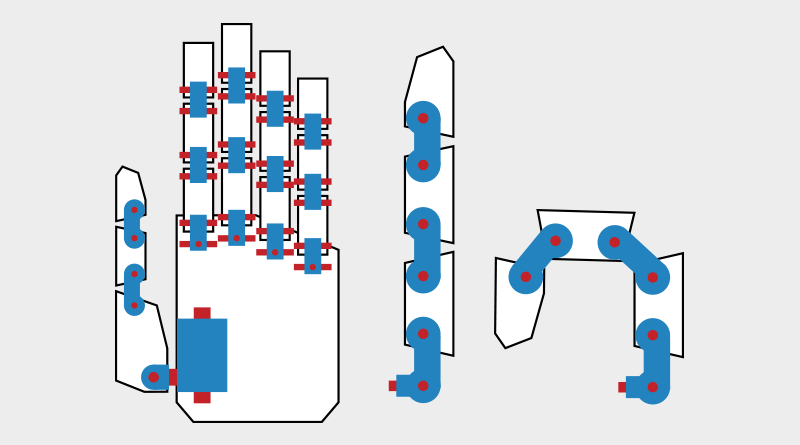 接着在纸上或绘图软体中,规划所有需要制作的零件与关节配置,作为之后建模的参考,这次使用是类似链条的机构作为关节,让手指关节能够大范围的活动。 图中蓝色部分是关节对象,红色部分则是要设置转轴的地方。
接着在纸上或绘图软体中,规划所有需要制作的零件与关节配置,作为之后建模的参考,这次使用是类似链条的机构作为关节,让手指关节能够大范围的活动。 图中蓝色部分是关节对象,红色部分则是要设置转轴的地方。 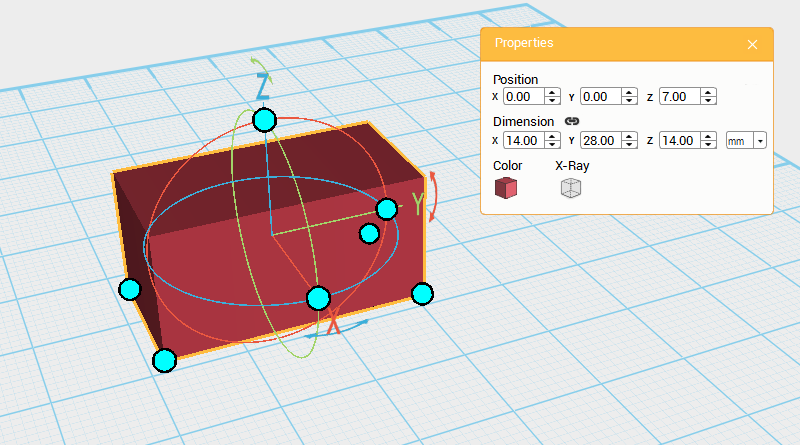 建立一个﹝Cube﹞对象,尺寸设定为X: 14,X: 28,Z: 14 mm,位置设定为X: 0,Y: 0,Z: 7,作为「指节A」对象。
建立一个﹝Cube﹞对象,尺寸设定为X: 14,X: 28,Z: 14 mm,位置设定为X: 0,Y: 0,Z: 7,作为「指节A」对象。 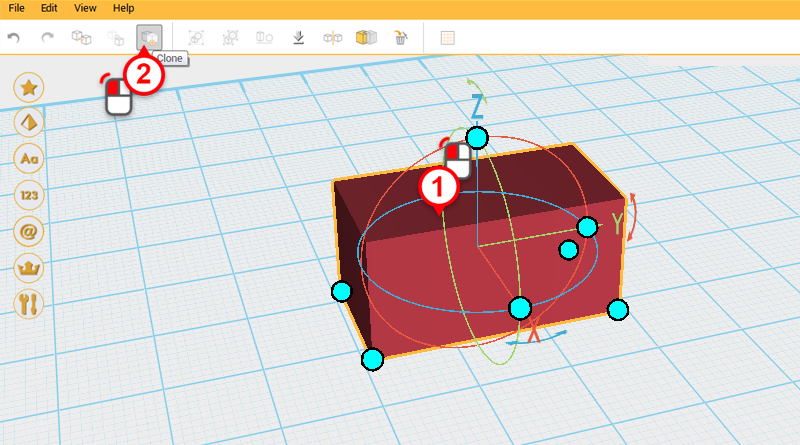
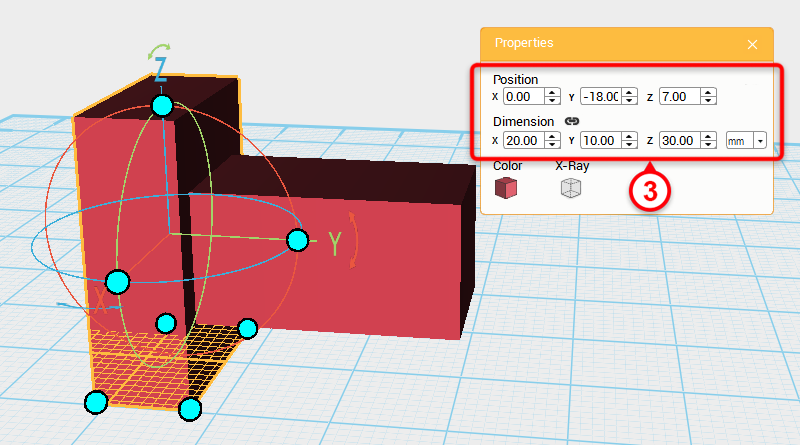 选取「指节A」对象,按下﹝Clone﹞按钮,接着将尺寸设定为X: 20,Y: 10,Z: 30 mm,位置设定为X: 0,Y: -18,Z: 7,,作为「切削」对象。
选取「指节A」对象,按下﹝Clone﹞按钮,接着将尺寸设定为X: 20,Y: 10,Z: 30 mm,位置设定为X: 0,Y: -18,Z: 7,,作为「切削」对象。 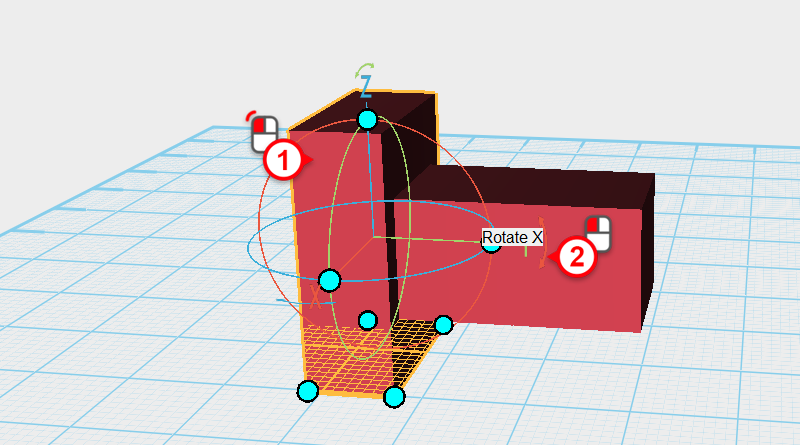
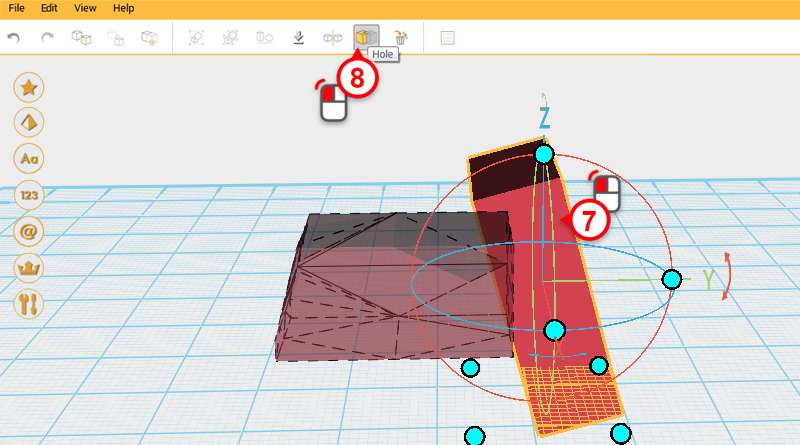
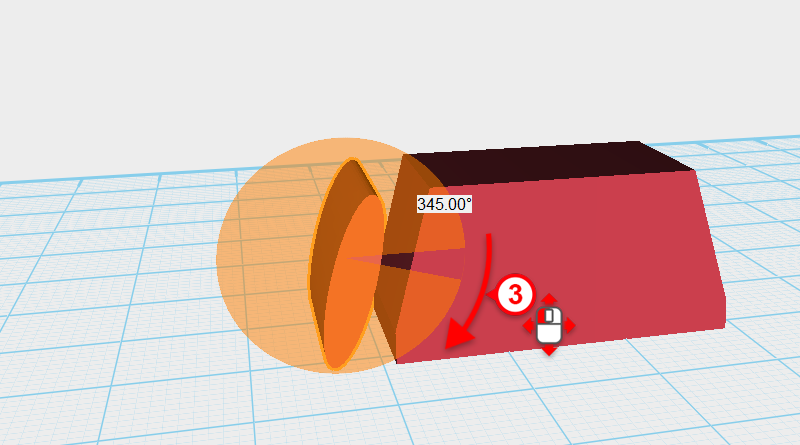
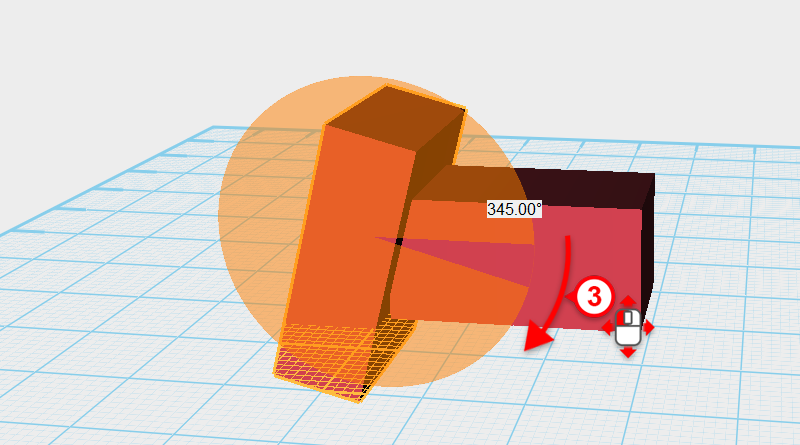 选取「切削」对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为345度。
选取「切削」对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为345度。 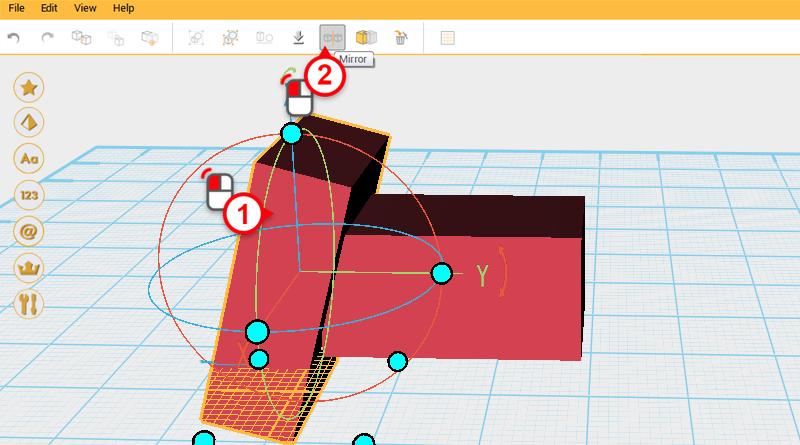
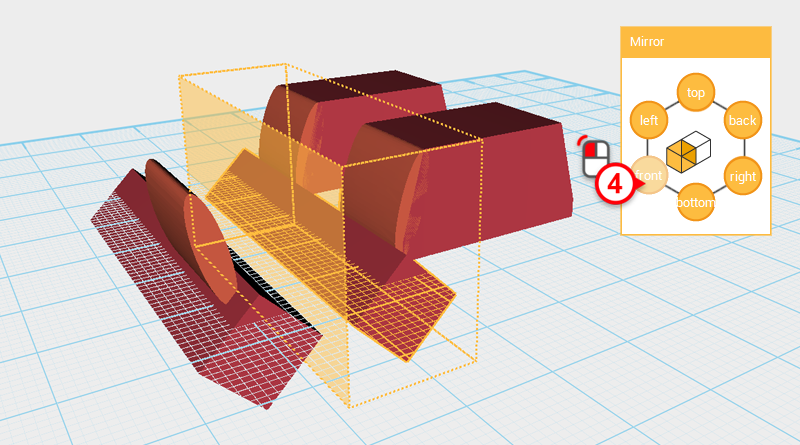
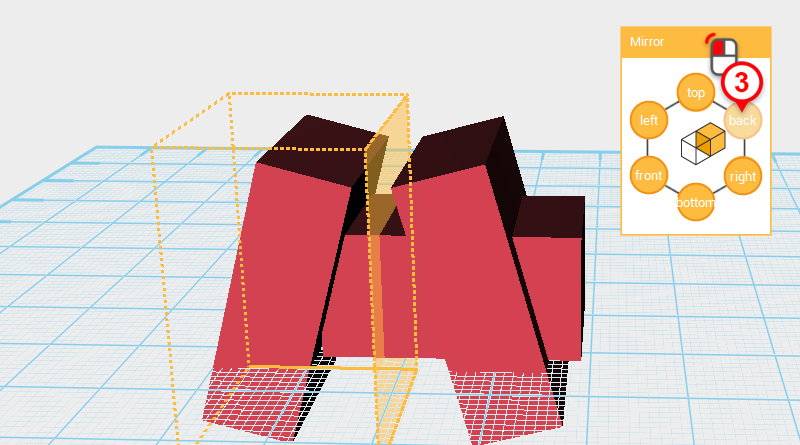 选取「切削」对象,按下﹝Mirror﹞按钮,接着再Mirror面板中按下﹝back﹞按钮。
选取「切削」对象,按下﹝Mirror﹞按钮,接着再Mirror面板中按下﹝back﹞按钮。 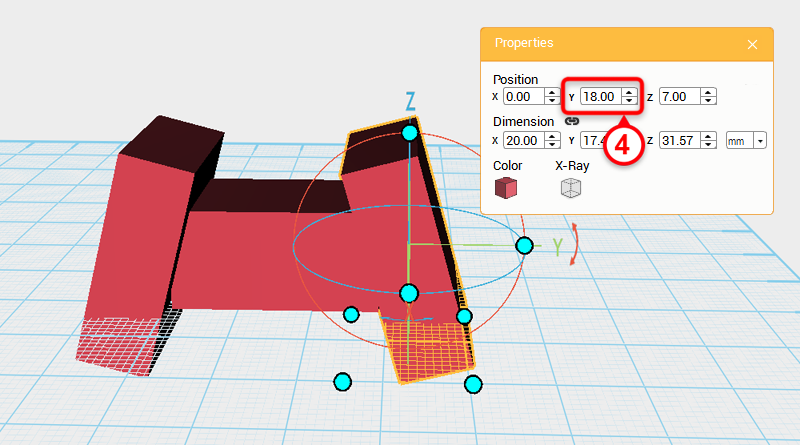 选取刚刚镜射出的「切削」对象,将位置的Y值设定为18。
选取刚刚镜射出的「切削」对象,将位置的Y值设定为18。 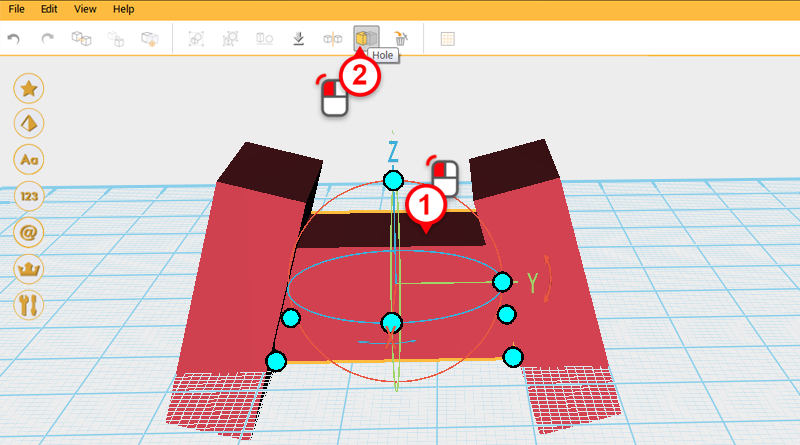
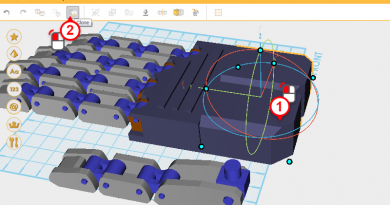
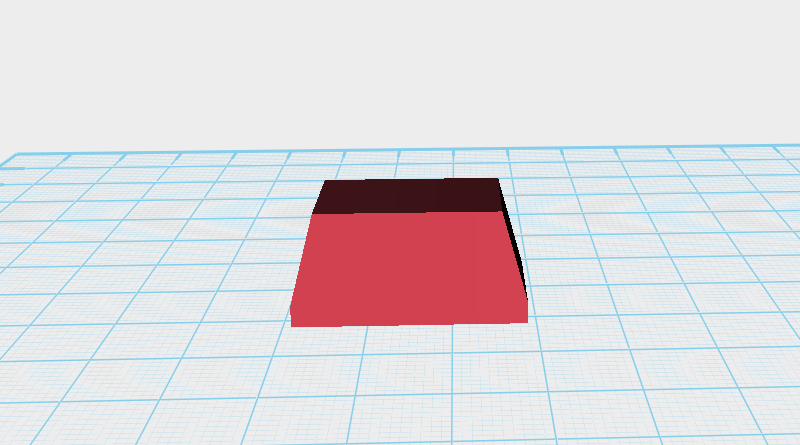 利用这两个「切削」对象与﹝Hole﹞功能,将「指节A」对象切削出如图的斜边。
利用这两个「切削」对象与﹝Hole﹞功能,将「指节A」对象切削出如图的斜边。 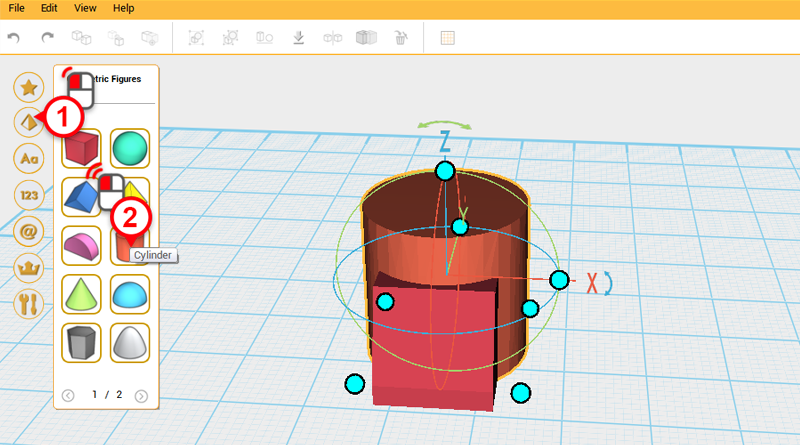
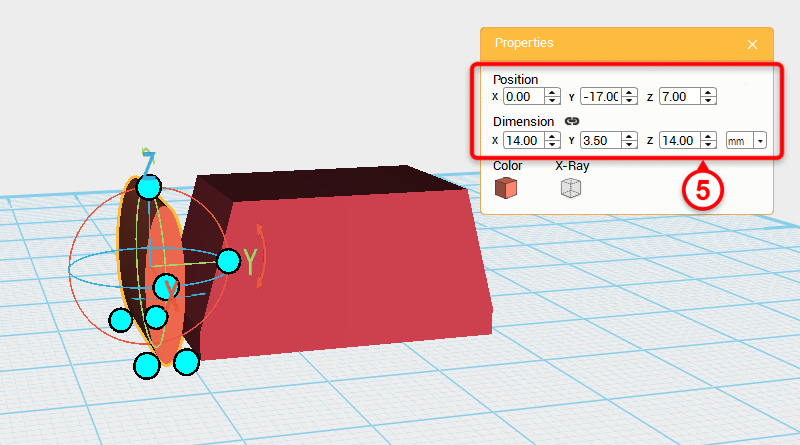 建立一个﹝Cylinder﹞对象,对Y轴旋转90度后,将尺寸设定为X: 14,Y: 3.5,Z: 14 mm,位置设定为X: 0,Y: -17,Z: 7。
建立一个﹝Cylinder﹞对象,对Y轴旋转90度后,将尺寸设定为X: 14,Y: 3.5,Z: 14 mm,位置设定为X: 0,Y: -17,Z: 7。 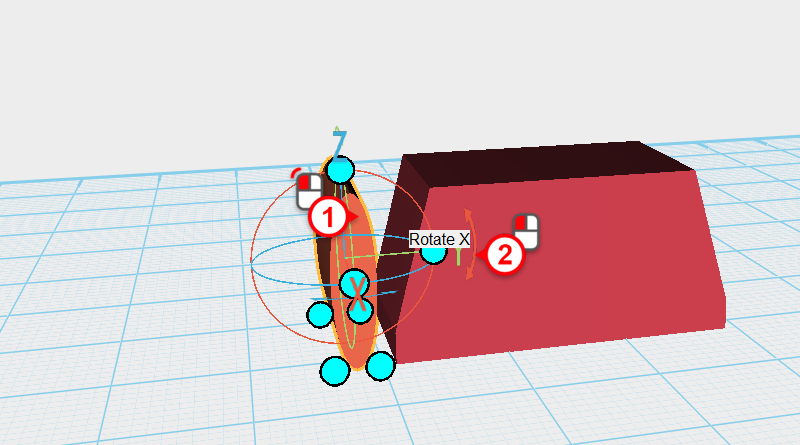
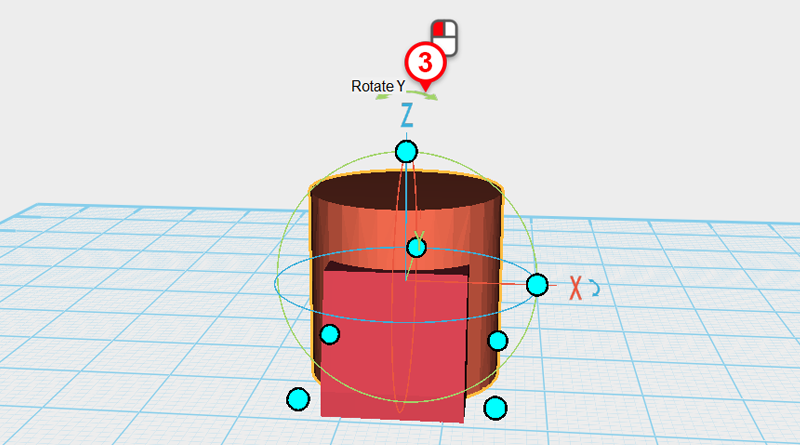
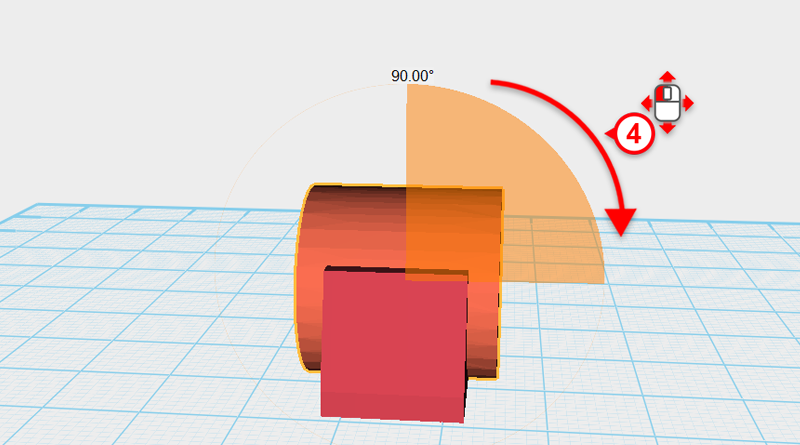
 选取﹝Cylinder﹞对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为345度。
选取﹝Cylinder﹞对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为345度。 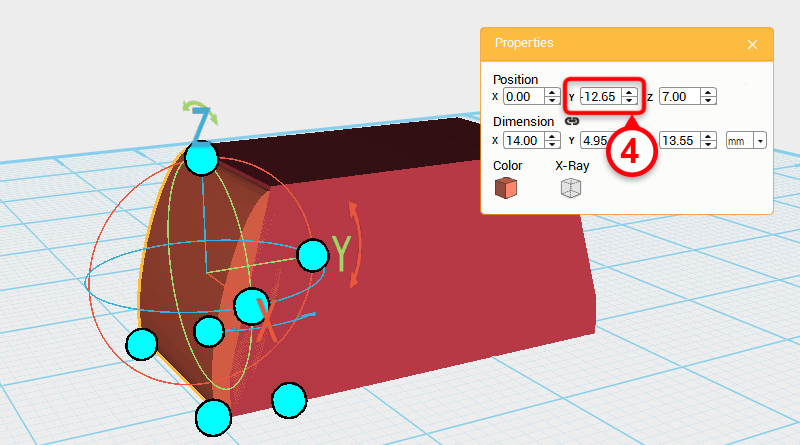 接着将位置的Y值设定为-12.65。
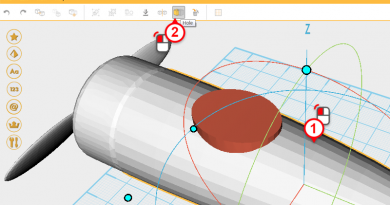
接着将位置的Y值设定为-12.65。 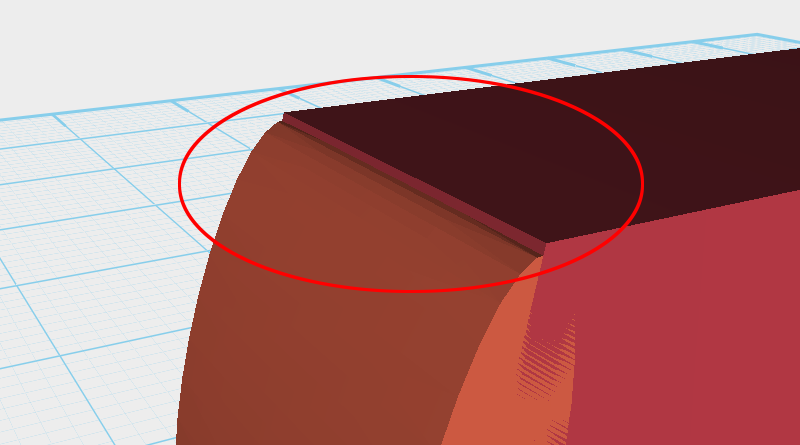 近距离观察对象,发现边缘的地方有落差。
近距离观察对象,发现边缘的地方有落差。 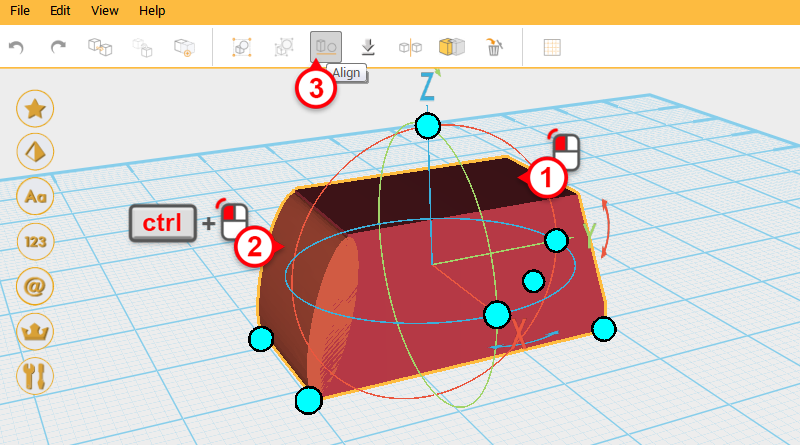 选取「指节A」对象,按键盘的﹝ctrl﹞键再点击﹝Cylinder﹞对象完成加选,接着按下﹝Align﹞按钮。
选取「指节A」对象,按键盘的﹝ctrl﹞键再点击﹝Cylinder﹞对象完成加选,接着按下﹝Align﹞按钮。 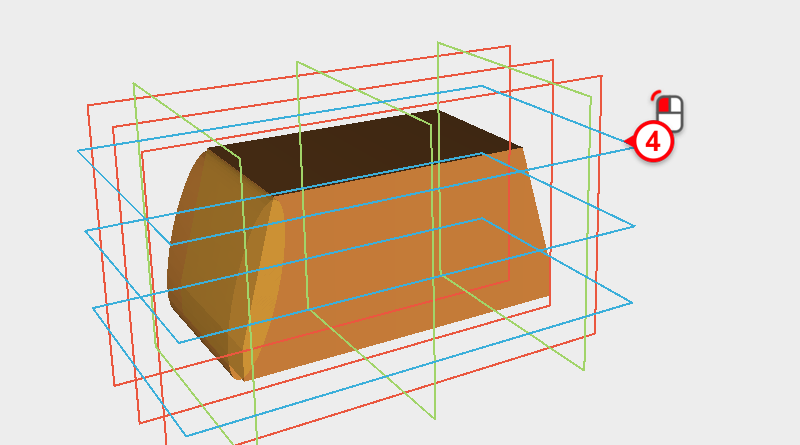 点击图中的蓝色框线,将对象向上对齐。
点击图中的蓝色框线,将对象向上对齐。 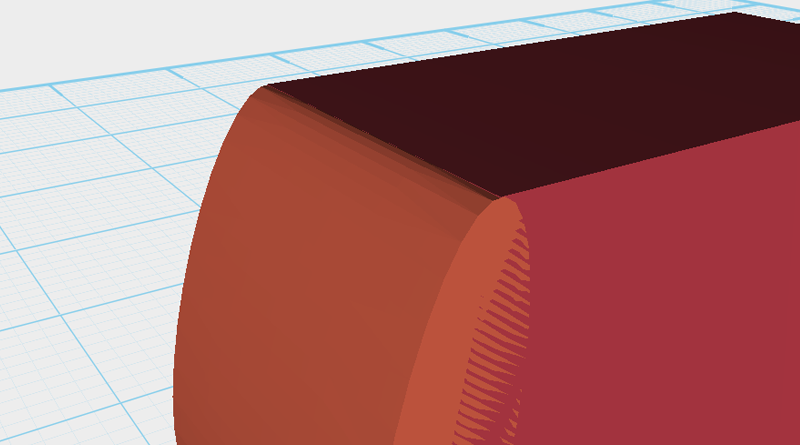 再拉近检查对象的状况,可以看到落差几乎消失了。
再拉近检查对象的状况,可以看到落差几乎消失了。 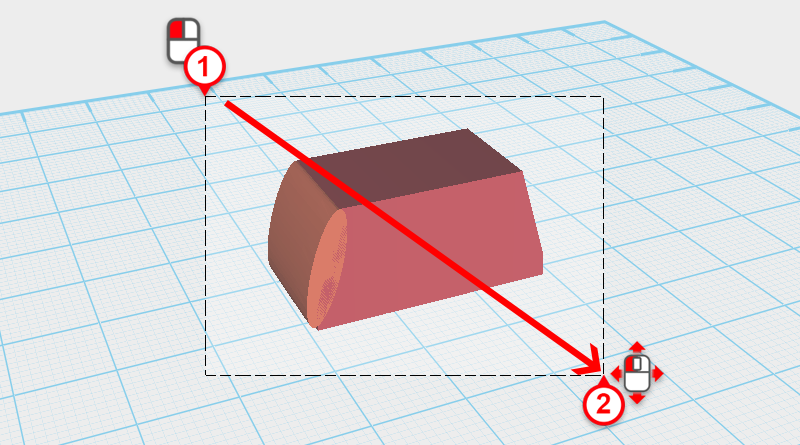
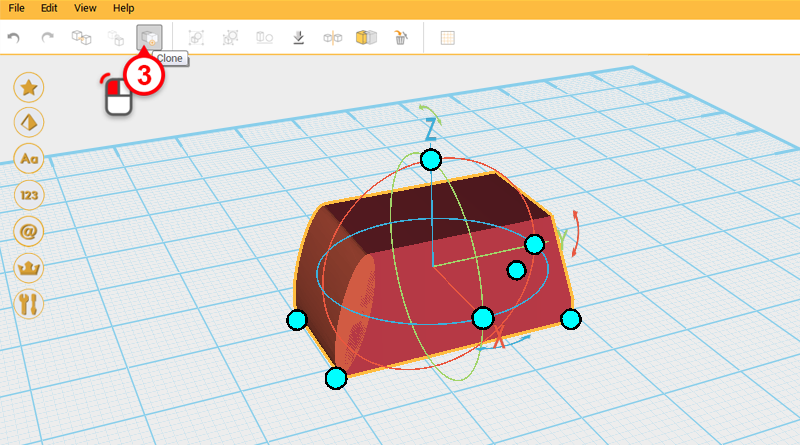
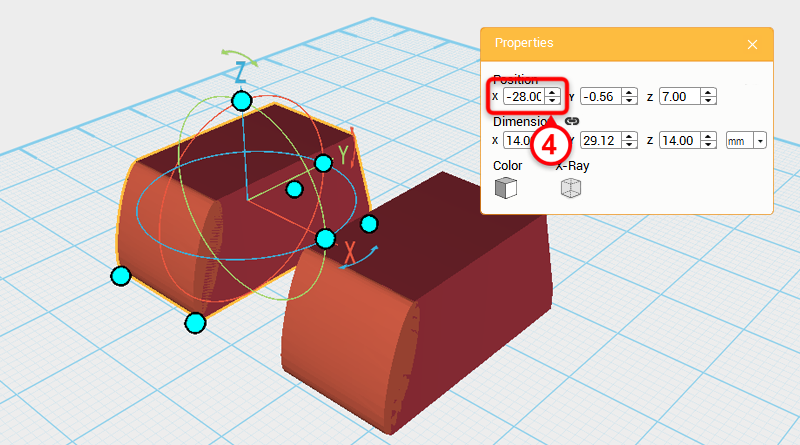 框选图中的对象,按下﹝Clone﹞按钮,接着将位置的X值设定为-28。
框选图中的对象,按下﹝Clone﹞按钮,接着将位置的X值设定为-28。 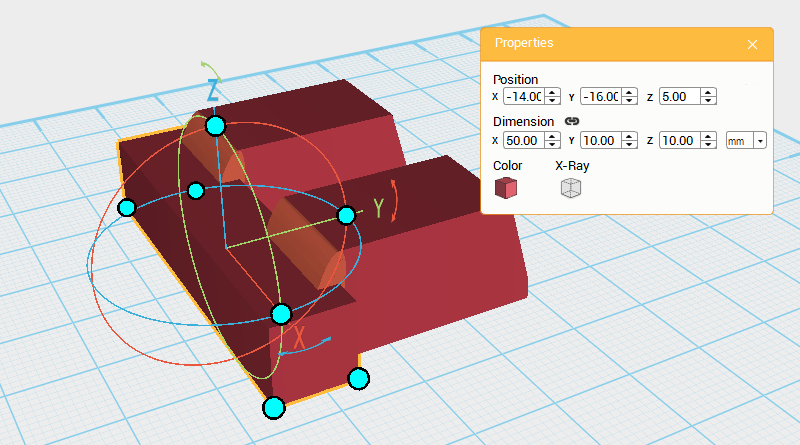 建立一个﹝Cube﹞对象,尺寸设定为X: 50,Y: 10,Z: 10 mm,位置设定为X: -14,Y: -16,Z: 5,作为「切削」对象。
建立一个﹝Cube﹞对象,尺寸设定为X: 50,Y: 10,Z: 10 mm,位置设定为X: -14,Y: -16,Z: 5,作为「切削」对象。 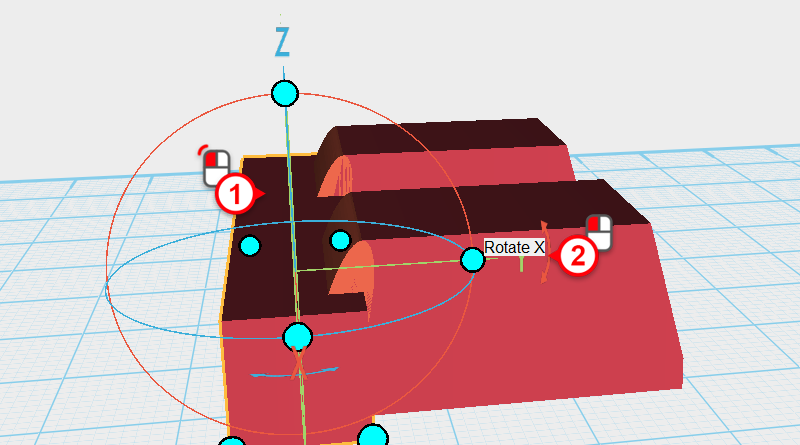
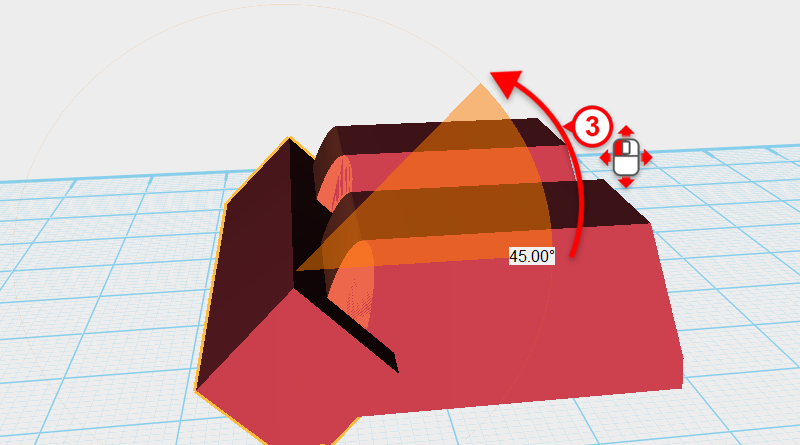 选取「切削」对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为45度。
选取「切削」对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为45度。 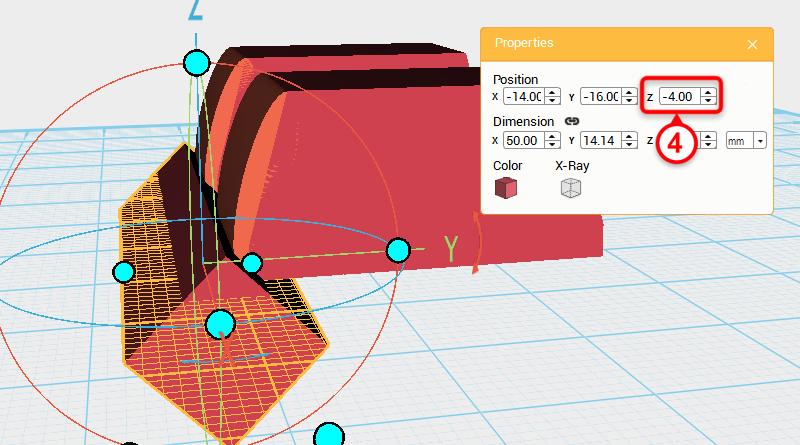 接着将位置的Z值设定为-4。
接着将位置的Z值设定为-4。 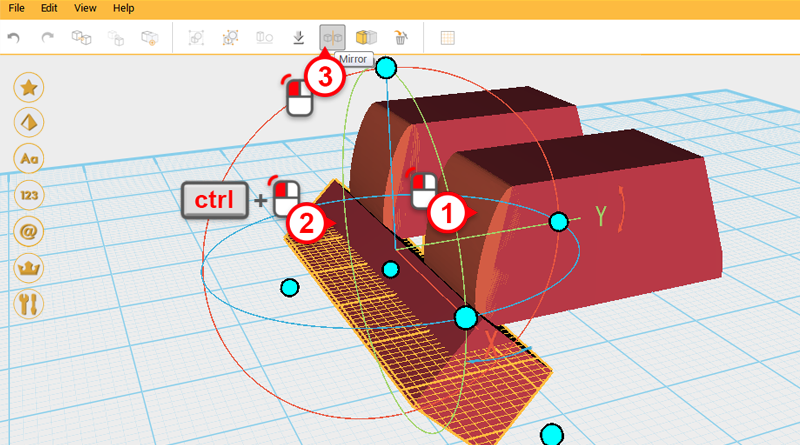
 选取图中的两个对象,按下﹝Mirror﹞按钮,接着在Mirror面板中按下﹝front﹞按钮。
选取图中的两个对象,按下﹝Mirror﹞按钮,接着在Mirror面板中按下﹝front﹞按钮。 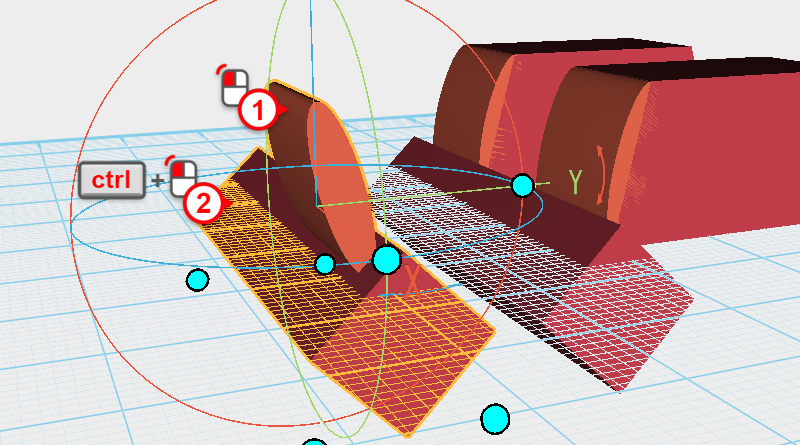
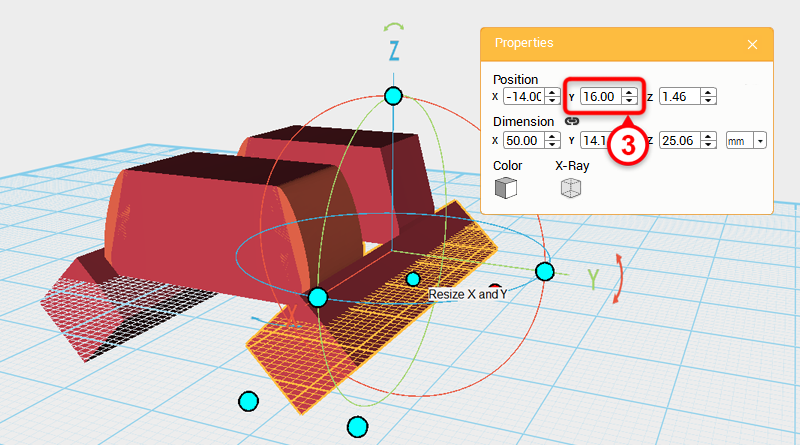 选取刚刚镜射出的两个对象,将位置的Y值设定为16。
选取刚刚镜射出的两个对象,将位置的Y值设定为16。 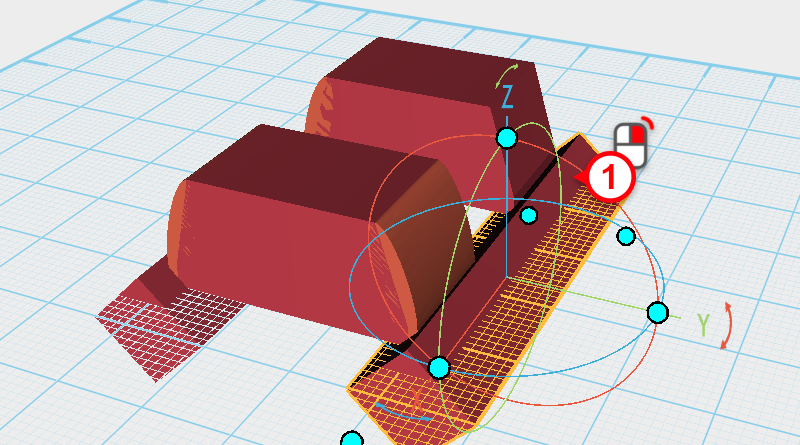
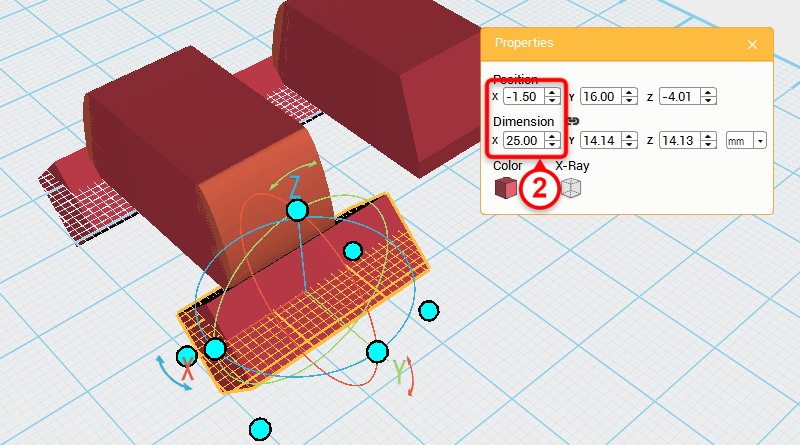 选取图中的﹝Cube﹞对象,将尺寸的X值设定为25,位置的X值设定为-1.5。
选取图中的﹝Cube﹞对象,将尺寸的X值设定为25,位置的X值设定为-1.5。 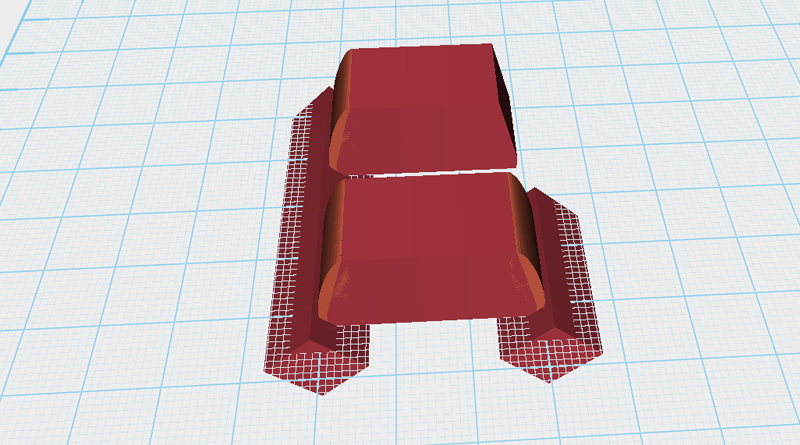 到目前为止对象间的位置关系应如图所示。
到目前为止对象间的位置关系应如图所示。 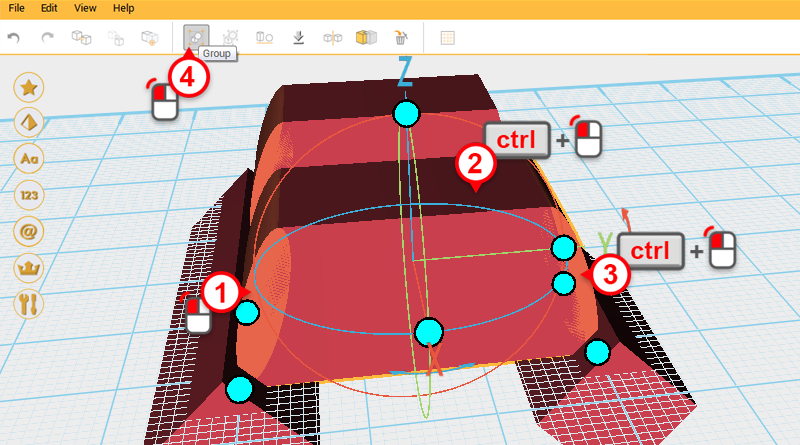 选取图中的三个对象,按下﹝Group﹞按钮,作为「指节A」对象。
选取图中的三个对象,按下﹝Group﹞按钮,作为「指节A」对象。 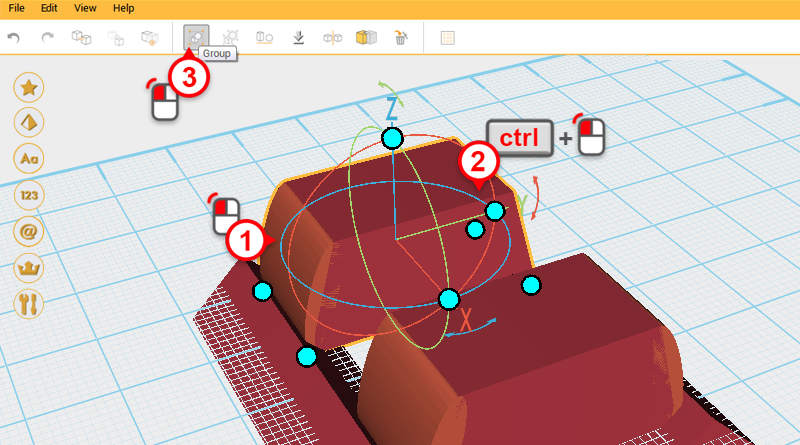 选取图中的两个对象,按下﹝Group﹞按钮,作为「指尖」对象。
选取图中的两个对象,按下﹝Group﹞按钮,作为「指尖」对象。 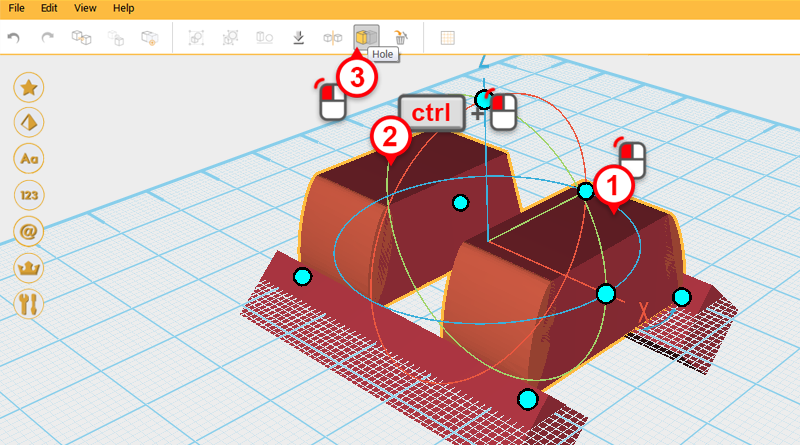 选取「指节A」对象,按键盘的﹝ctrl﹞键再点击「指间」对象完成加选,接着按下﹝Hole﹞按钮。
选取「指节A」对象,按键盘的﹝ctrl﹞键再点击「指间」对象完成加选,接着按下﹝Hole﹞按钮。 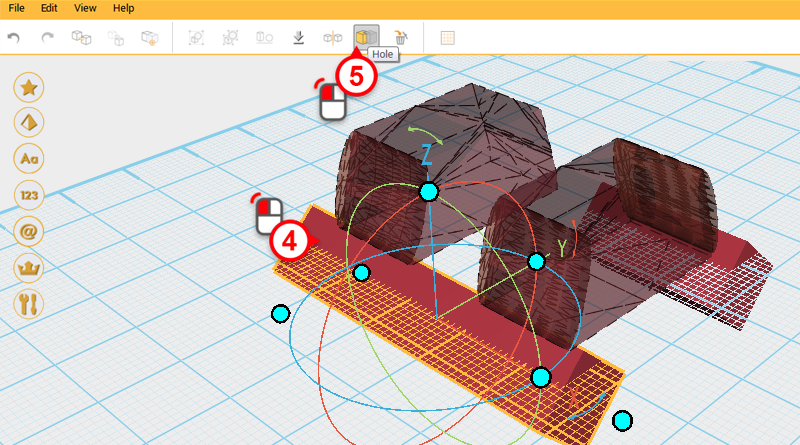
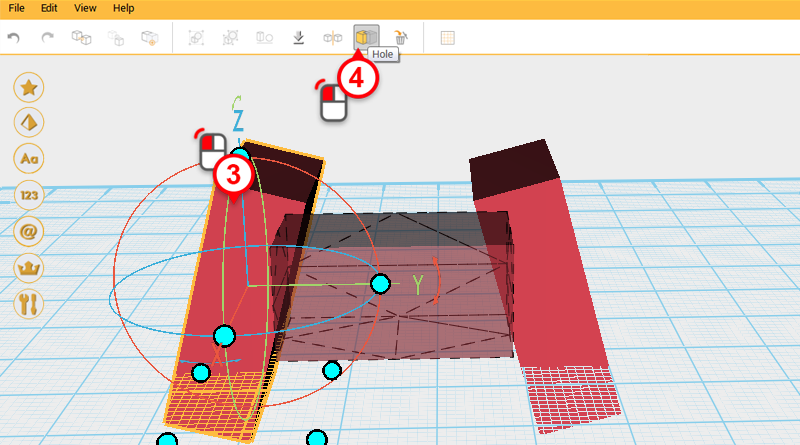
 接着选取图中的「切削」对象,再次按下﹝Hole﹞按钮。
接着选取图中的「切削」对象,再次按下﹝Hole﹞按钮。 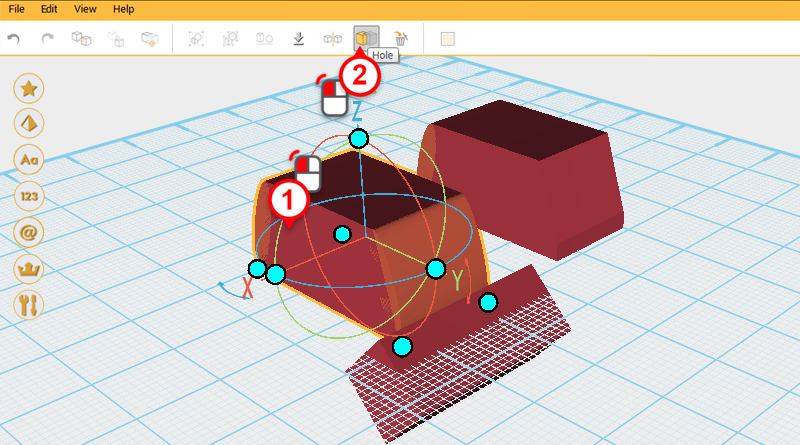 选取「指节A」对象,接着按下﹝Home﹞按钮。
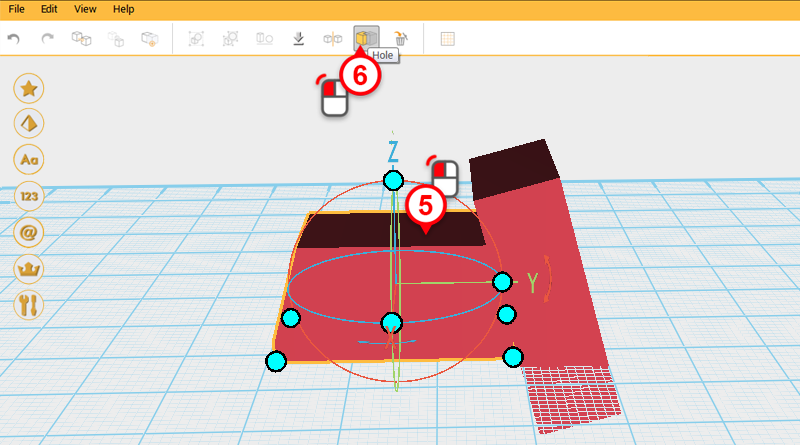
选取「指节A」对象,接着按下﹝Home﹞按钮。 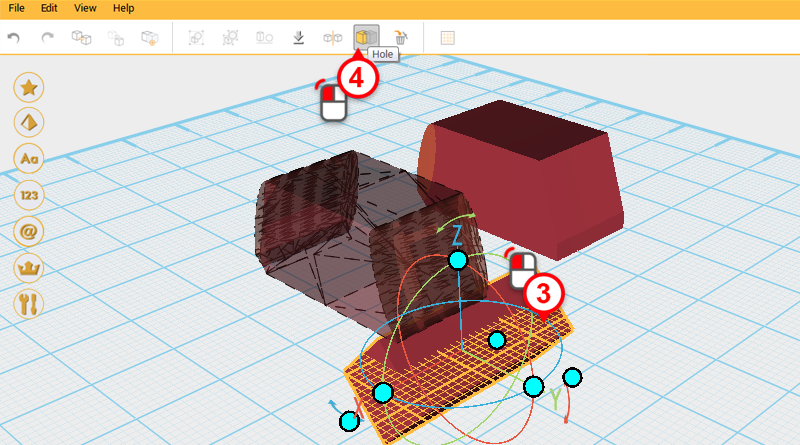 接着选取图中的「切削」对象,再次按下﹝Hole﹞按钮,完成另一端的切削。
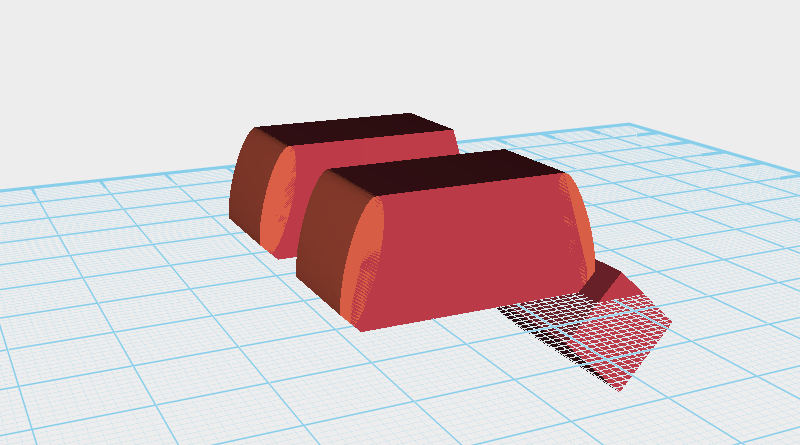
接着选取图中的「切削」对象,再次按下﹝Hole﹞按钮,完成另一端的切削。 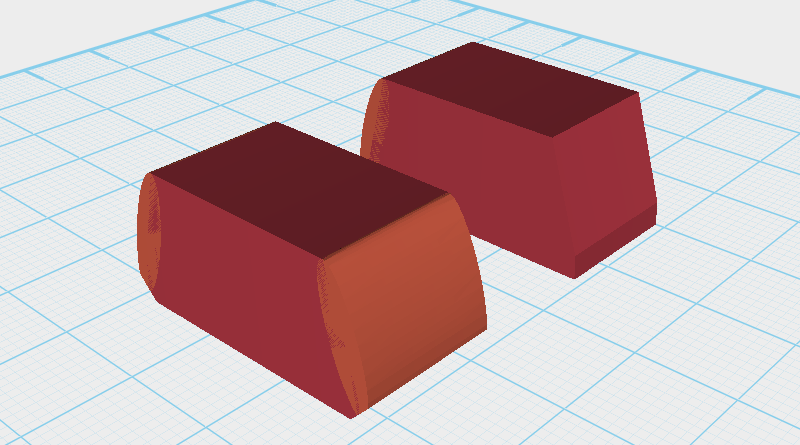 切削完成的对象应如图所示。
切削完成的对象应如图所示。