XYZmaker建模教学 – 机械手PART8
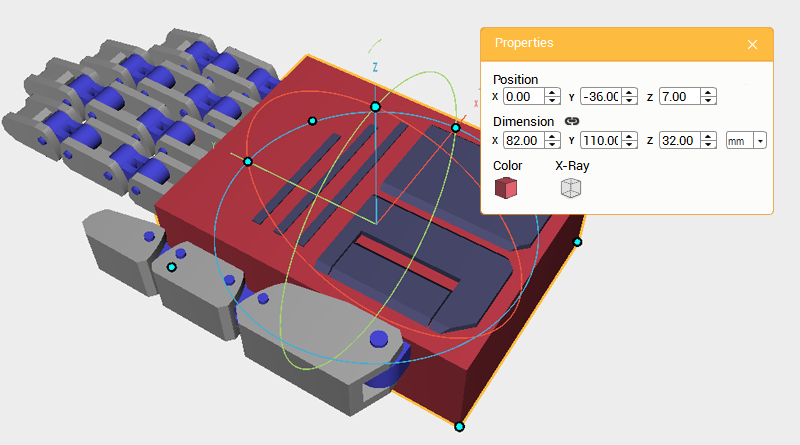 接下来要制作手背的护甲,首先将「工作平面网格」关闭以方便检视对象。建立一个﹝Cube﹞对象,尺寸设定为X: 82,Y: 110,Z: 32 mm,位置设定为X: 0,Y: -36,Z: 7,作为「手背护甲」对象。
接下来要制作手背的护甲,首先将「工作平面网格」关闭以方便检视对象。建立一个﹝Cube﹞对象,尺寸设定为X: 82,Y: 110,Z: 32 mm,位置设定为X: 0,Y: -36,Z: 7,作为「手背护甲」对象。 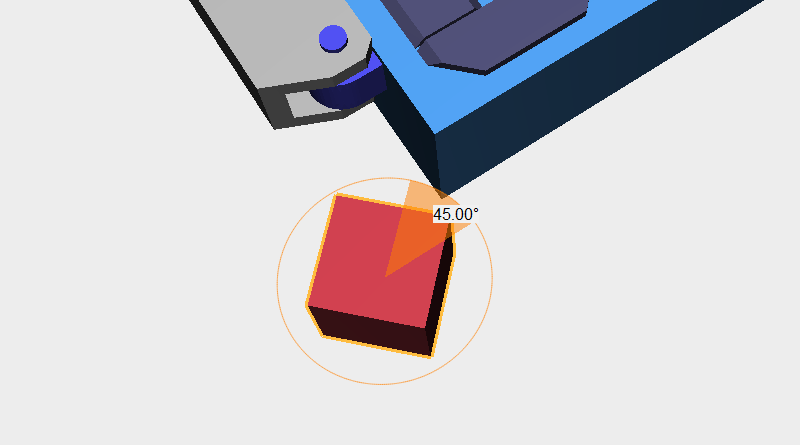 再来要配合「掌心」对象的形状,对「手背护甲」对象切削出斜角。建立一个﹝Cube﹞对象,移动到「手背护甲」对象的旁边,对Z轴旋转45度,作为「切削」对象。
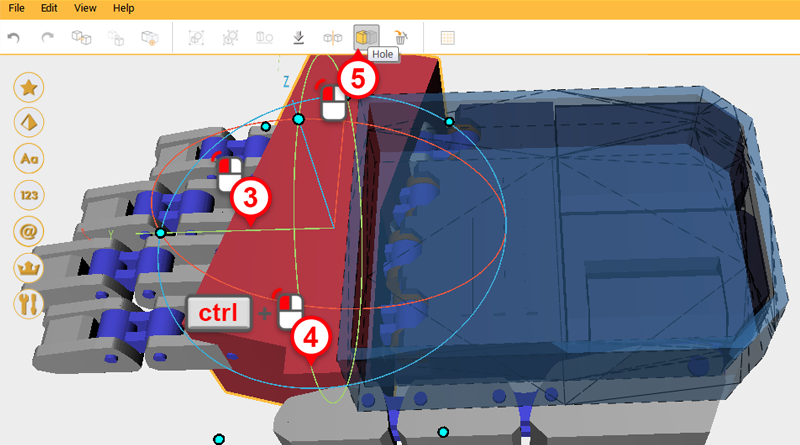
再来要配合「掌心」对象的形状,对「手背护甲」对象切削出斜角。建立一个﹝Cube﹞对象,移动到「手背护甲」对象的旁边,对Z轴旋转45度,作为「切削」对象。 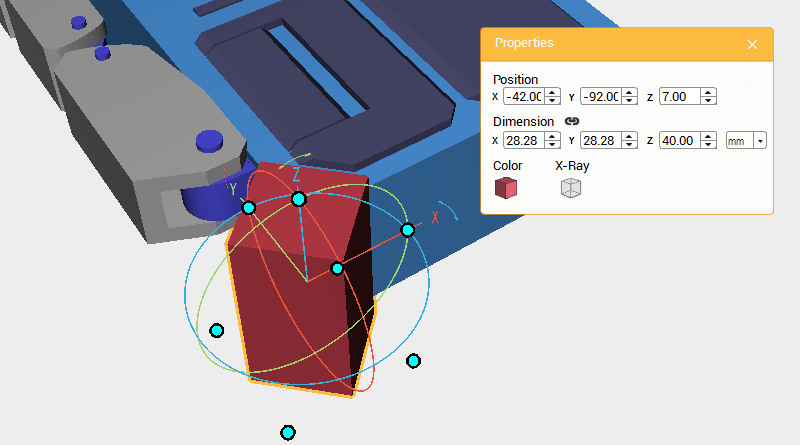 将「切削」对象的尺寸的Z值设定为40mm,位置设定为X: -42,Y: -92,Z: 7。
将「切削」对象的尺寸的Z值设定为40mm,位置设定为X: -42,Y: -92,Z: 7。 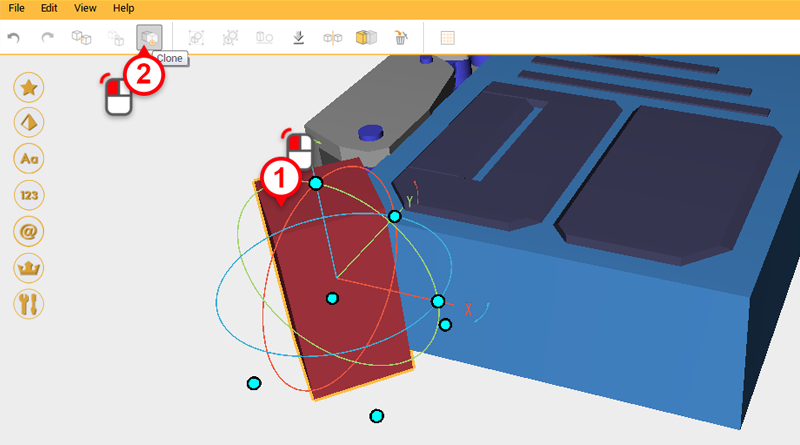
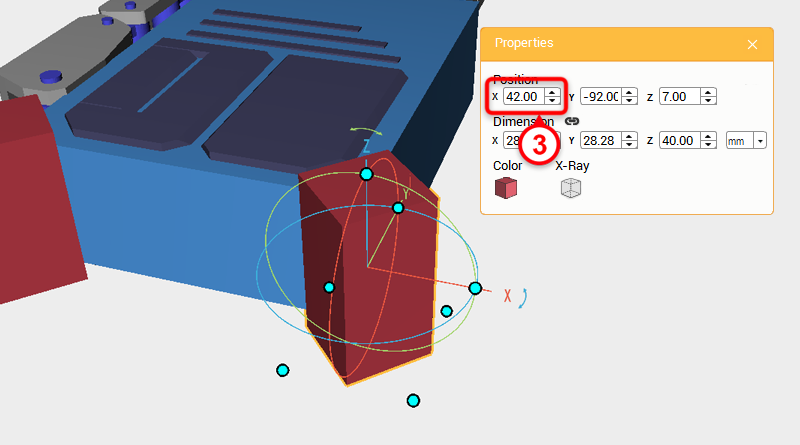 选取「切削」对象,按下﹝Clone﹞按钮,接着将位置的X值设定为42。
选取「切削」对象,按下﹝Clone﹞按钮,接着将位置的X值设定为42。 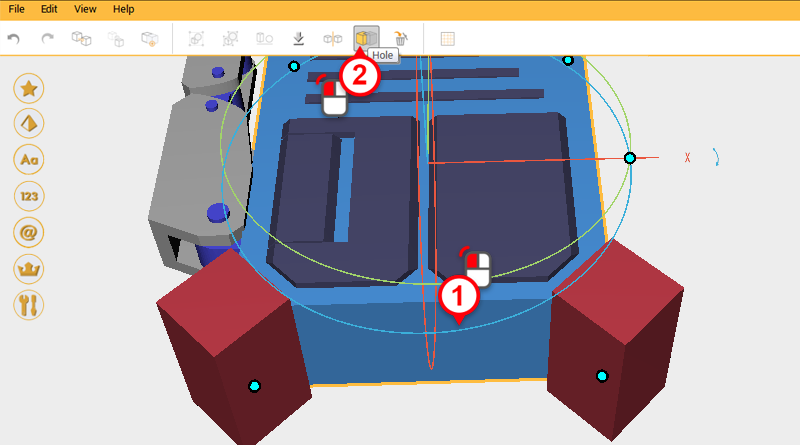
 利用这两个「切削」对象与﹝Hole﹞功能,将「手背护甲」对象切削出斜角。
利用这两个「切削」对象与﹝Hole﹞功能,将「手背护甲」对象切削出斜角。 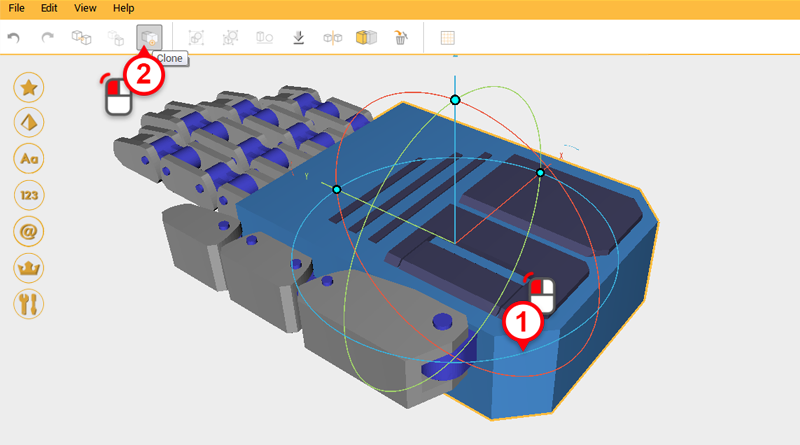
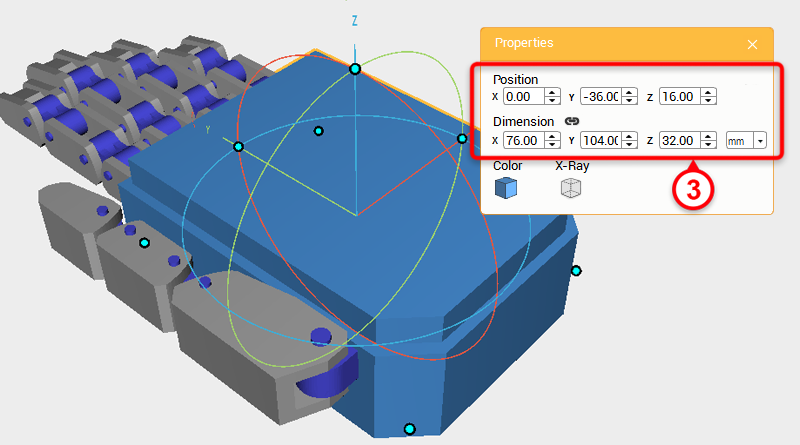 选取「手背护甲」对象,按下﹝Clone﹞按钮,接着将尺寸设定为X: 76,Y: 104,Z: 32 mm,位置的Z值设定为16,作为「切削」对象。
选取「手背护甲」对象,按下﹝Clone﹞按钮,接着将尺寸设定为X: 76,Y: 104,Z: 32 mm,位置的Z值设定为16,作为「切削」对象。 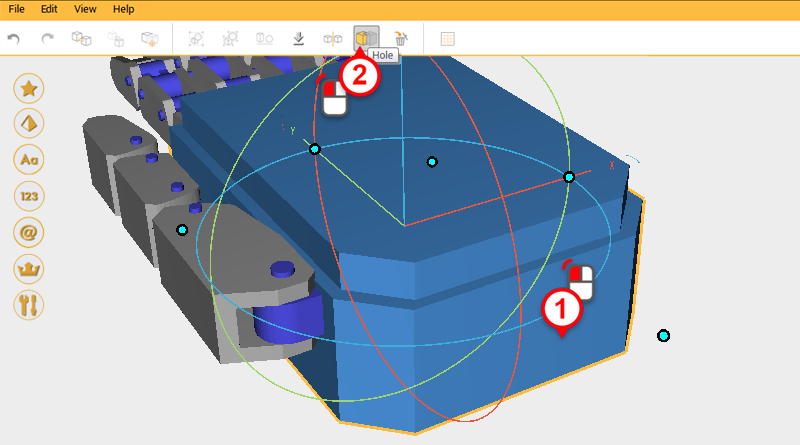
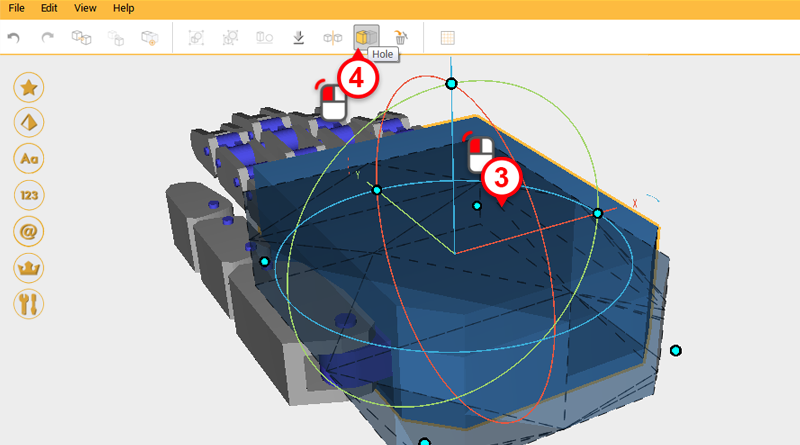
 利用「切削」对象与﹝Hole﹞功能,将「手背护甲」对象挖出内部的空间。
利用「切削」对象与﹝Hole﹞功能,将「手背护甲」对象挖出内部的空间。 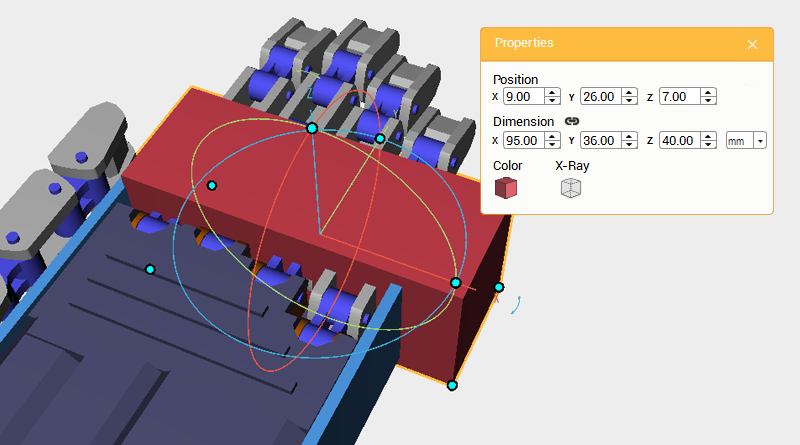 「手背护甲」对象的前方还需要再次切削,挖出让手指伸出的空间。建立一个﹝Cube﹞对象,尺寸设定为X: 95,Y: 36,Z: 40 mm,位置设定为X: 9,Y: 26,Z: 7,作为「切削」对象。
「手背护甲」对象的前方还需要再次切削,挖出让手指伸出的空间。建立一个﹝Cube﹞对象,尺寸设定为X: 95,Y: 36,Z: 40 mm,位置设定为X: 9,Y: 26,Z: 7,作为「切削」对象。 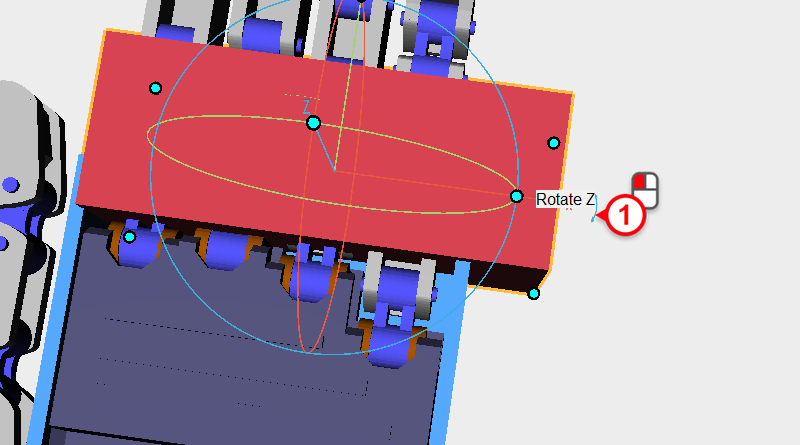
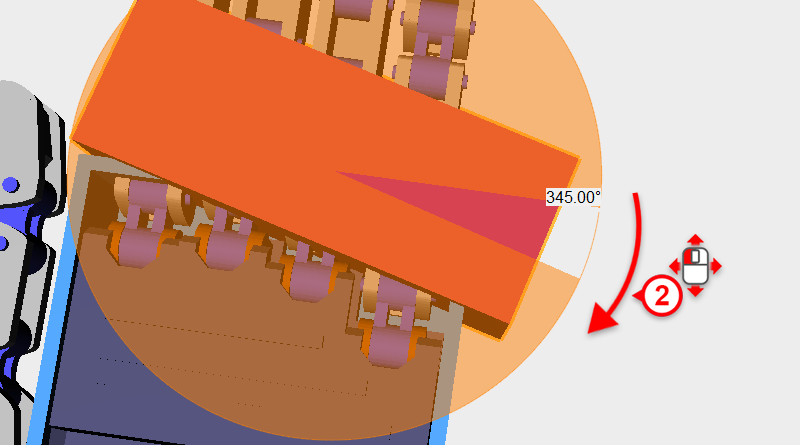 选取「切削」对象,按住控制器中X字母旁的箭头,拖曳滑鼠直到旋转数值显示为345度。
选取「切削」对象,按住控制器中X字母旁的箭头,拖曳滑鼠直到旋转数值显示为345度。 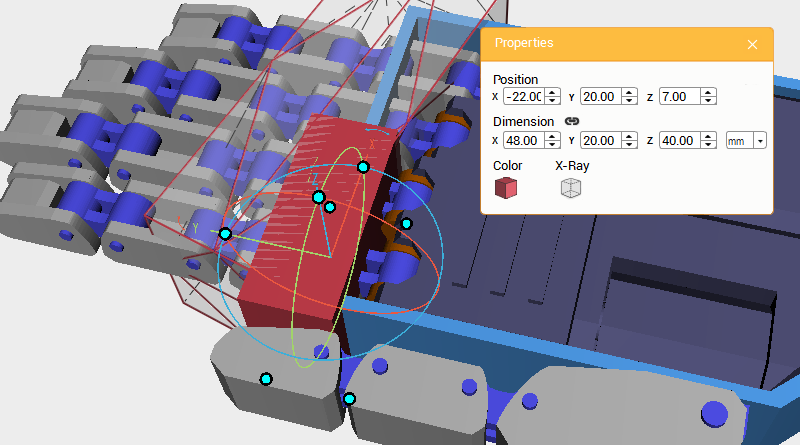 再建立一个﹝Cube﹞对象,尺寸设定为X: 48,Y: 20,Z: 40 mm,位置设定为X: -22,Y: 20,Z: 7,作为「切削」对象。
再建立一个﹝Cube﹞对象,尺寸设定为X: 48,Y: 20,Z: 40 mm,位置设定为X: -22,Y: 20,Z: 7,作为「切削」对象。 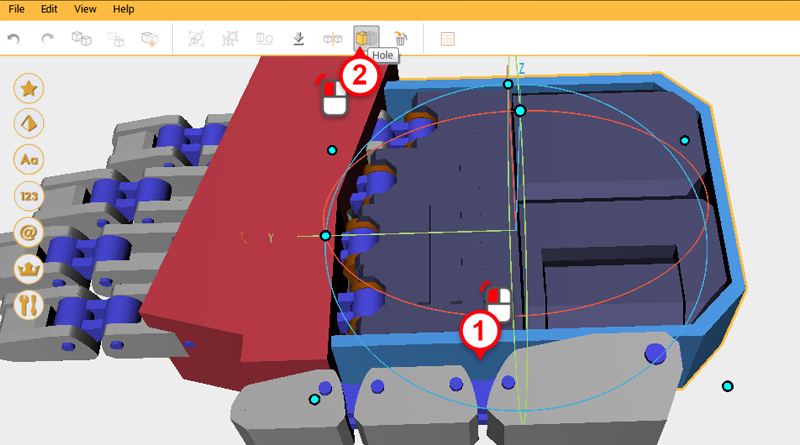
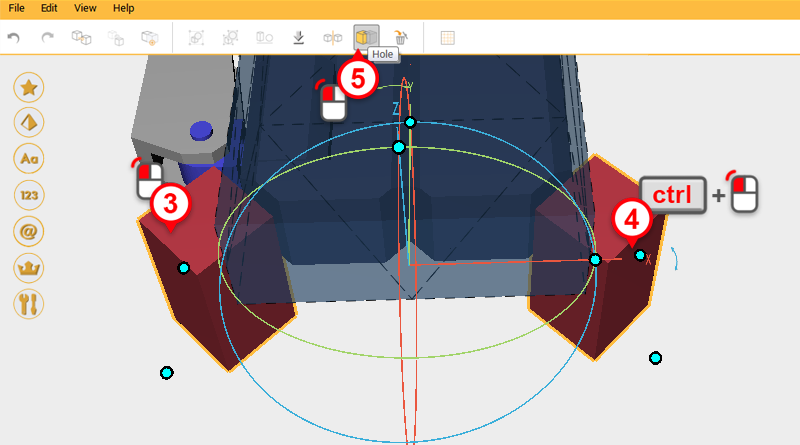
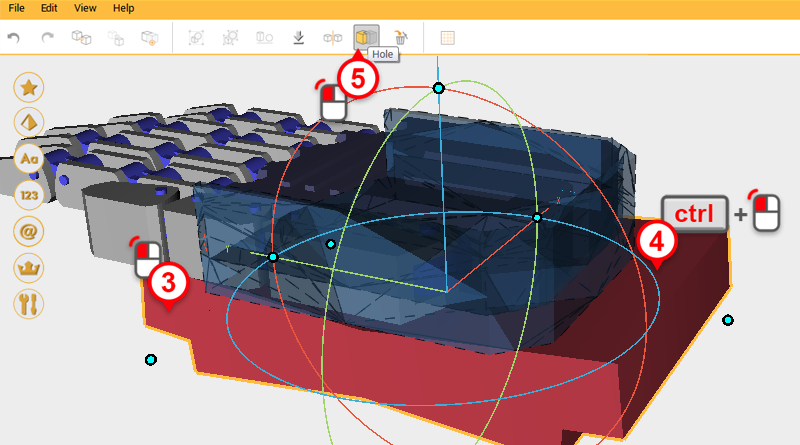
 利用这两个「切削」对象与﹝Hole﹞功能,将「手背护甲」对象前方切削掉。
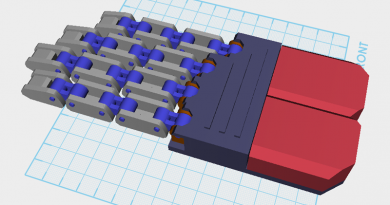
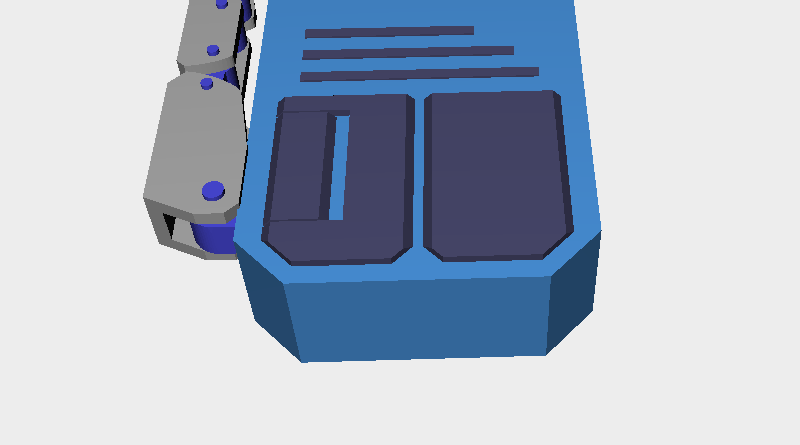
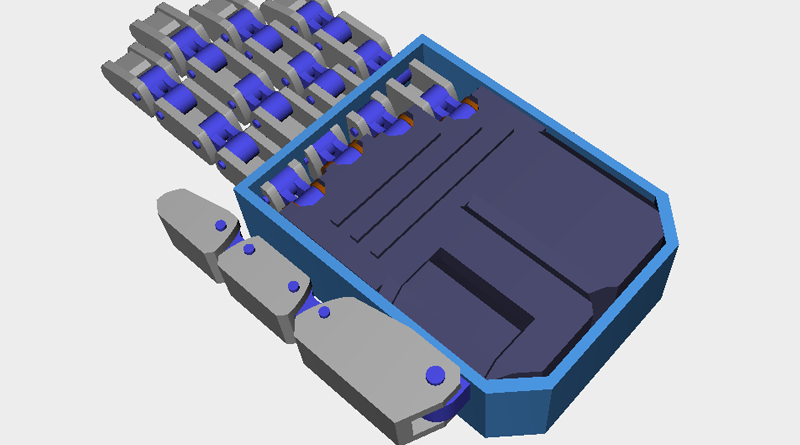
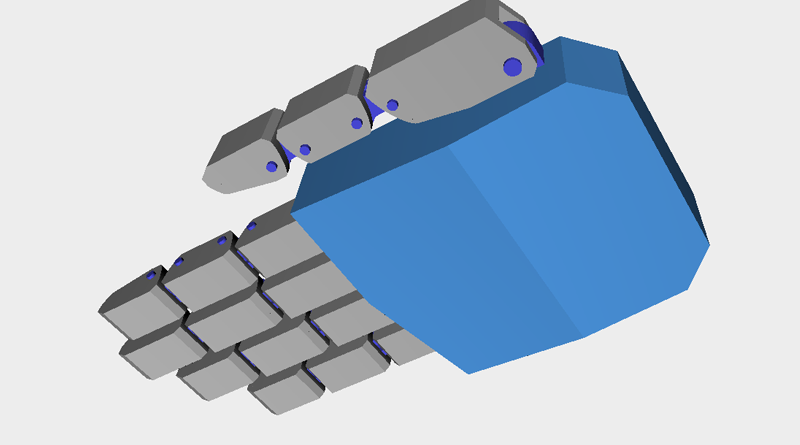
利用这两个「切削」对象与﹝Hole﹞功能,将「手背护甲」对象前方切削掉。 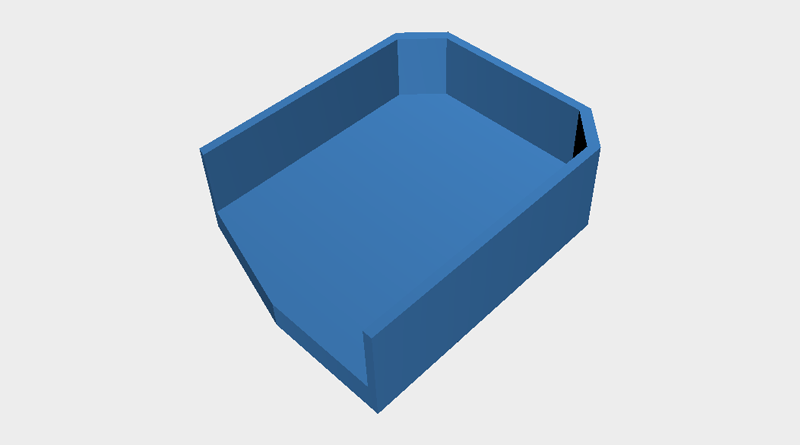 在此阶段若单独检视「手背护甲」对象,应如图中所显示的形状。
在此阶段若单独检视「手背护甲」对象,应如图中所显示的形状。 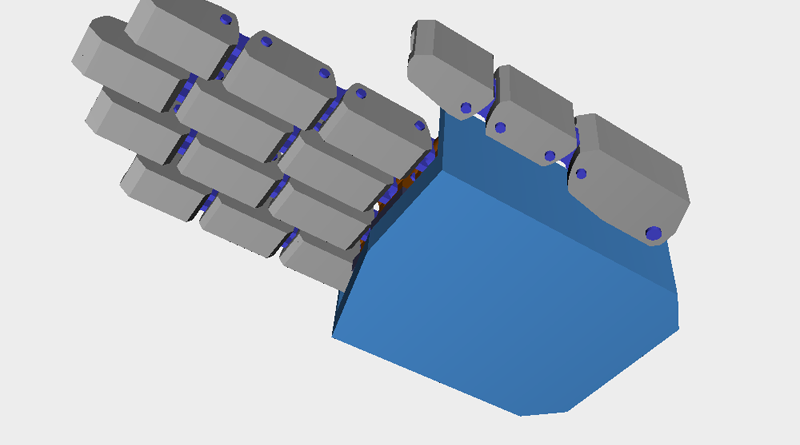 所有模型已大致完成,但检视手背部分,发现太过平坦单调,因此需要再次加工,增加外观上的变化。
所有模型已大致完成,但检视手背部分,发现太过平坦单调,因此需要再次加工,增加外观上的变化。 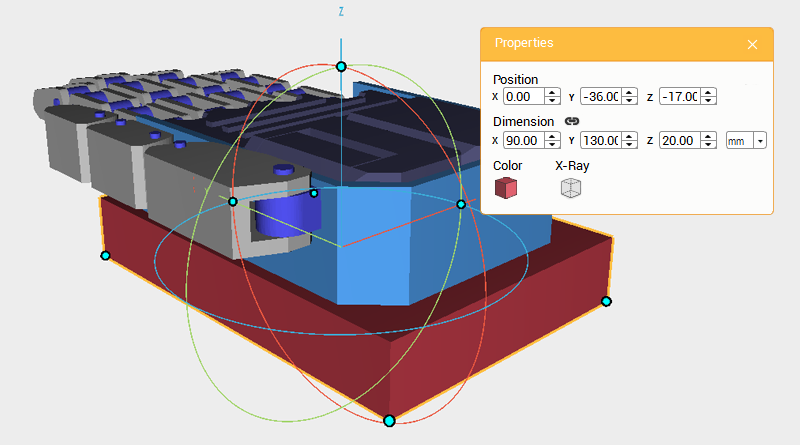 建立一个﹝Cube﹞对象,尺寸设定为X: 90,Y: 130,Z: 20 mm,位置设定为X: 0,Y: -36,Z: -17,作为「切削」对象。
建立一个﹝Cube﹞对象,尺寸设定为X: 90,Y: 130,Z: 20 mm,位置设定为X: 0,Y: -36,Z: -17,作为「切削」对象。 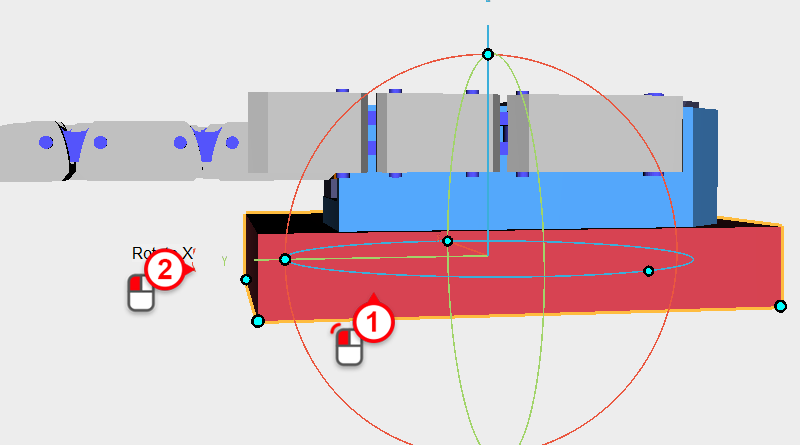
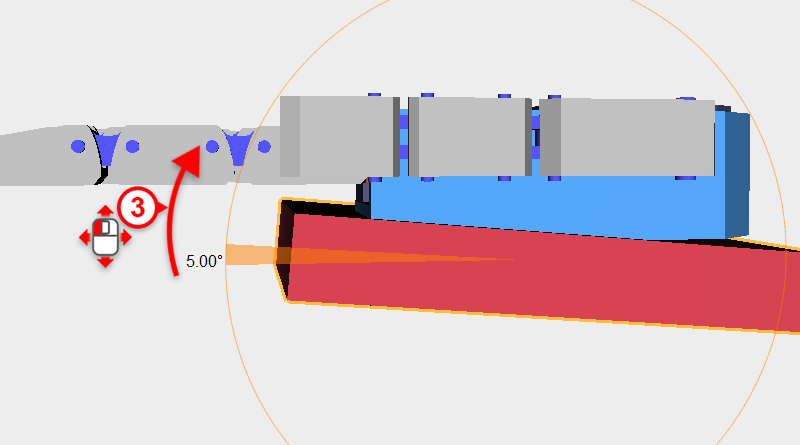 选取「切削」对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为5度。
选取「切削」对象,按住控制器中Y字母旁的箭头,拖曳滑鼠直到旋转数值显示为5度。 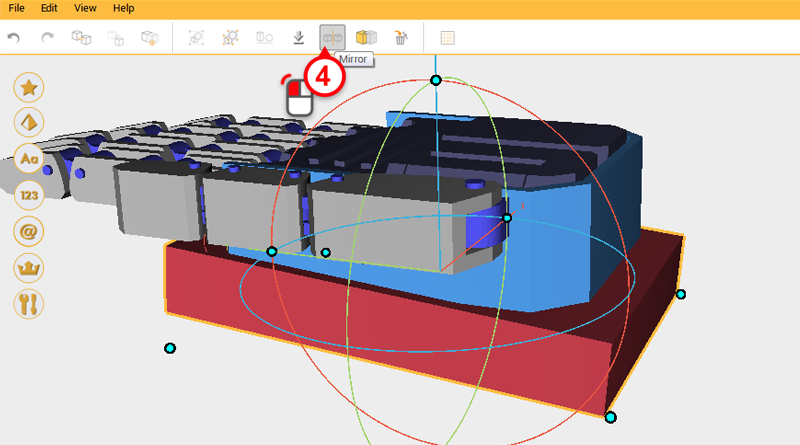
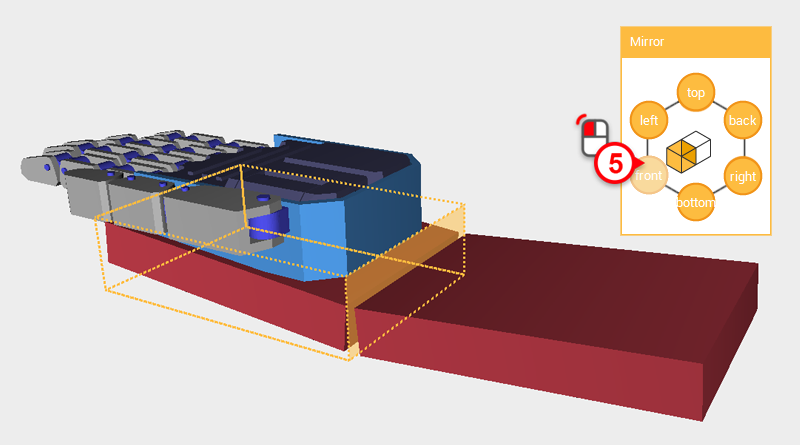 接着按下﹝Mirror﹞按钮,在Mirror面板中按下﹝front﹞按钮,镜射出另一个「切削」对象。
接着按下﹝Mirror﹞按钮,在Mirror面板中按下﹝front﹞按钮,镜射出另一个「切削」对象。 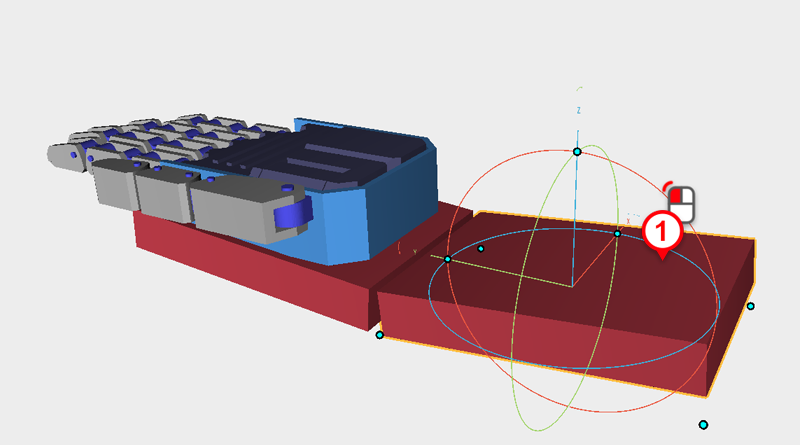
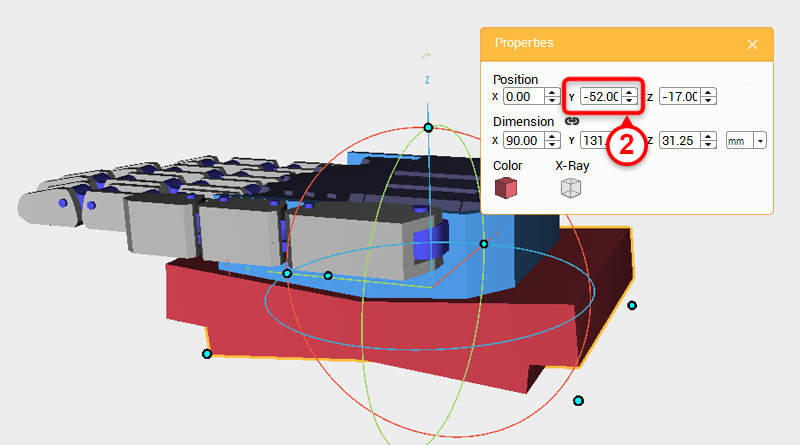 选取刚刚镜射出来的「切削」对象,将位置的Y值设定为-52。
选取刚刚镜射出来的「切削」对象,将位置的Y值设定为-52。 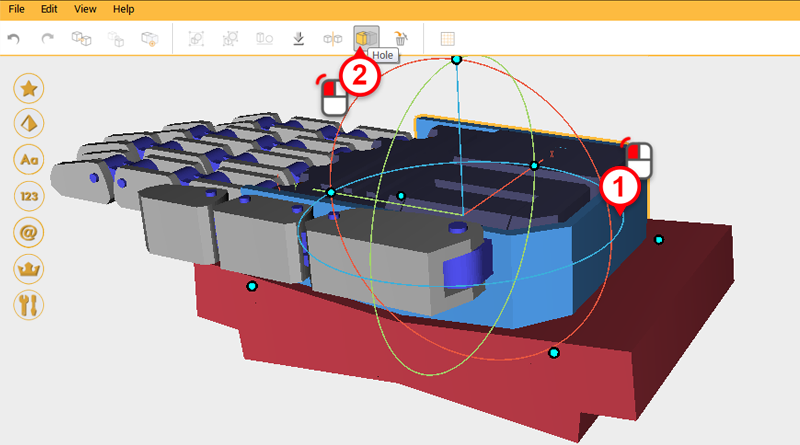
 利用这两个「切削」对象,将「手背护甲」对象下方切削出斜面。
利用这两个「切削」对象,将「手背护甲」对象下方切削出斜面。 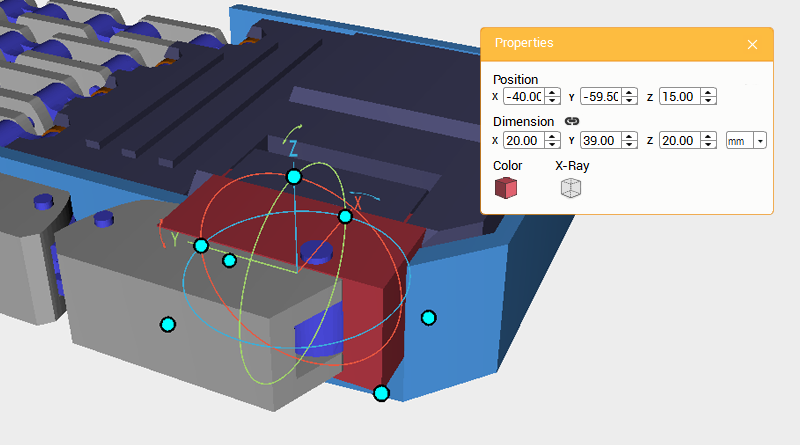 接着要对拇指与手掌连结的地方切削出空间,建立一个﹝Cube﹞对象,尺寸设定为X: 20,Y: 39,Z: 20 mm,位置设定为X: -40,Y: -59.5,Z : 15,作为「切削」对象。
接着要对拇指与手掌连结的地方切削出空间,建立一个﹝Cube﹞对象,尺寸设定为X: 20,Y: 39,Z: 20 mm,位置设定为X: -40,Y: -59.5,Z : 15,作为「切削」对象。 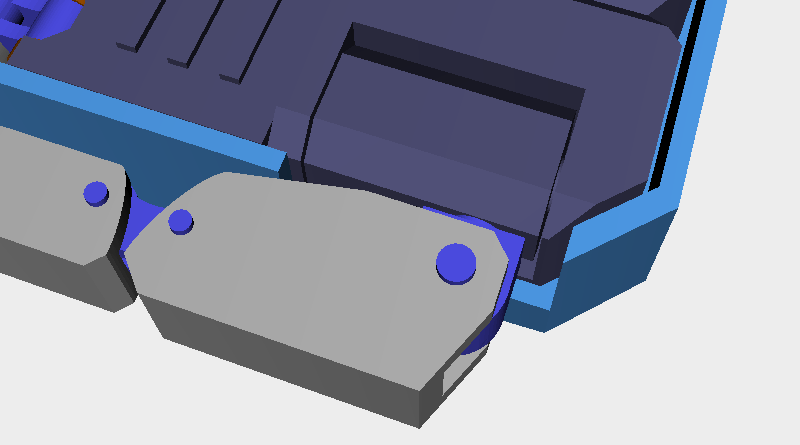 利用「切削」对象与﹝Hole﹞功能,将「手背护甲」对象切削出让拇指连结的空间。
利用「切削」对象与﹝Hole﹞功能,将「手背护甲」对象切削出让拇指连结的空间。 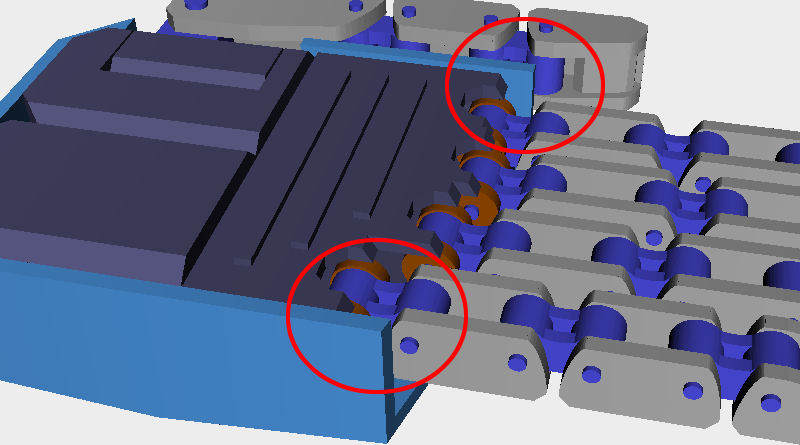
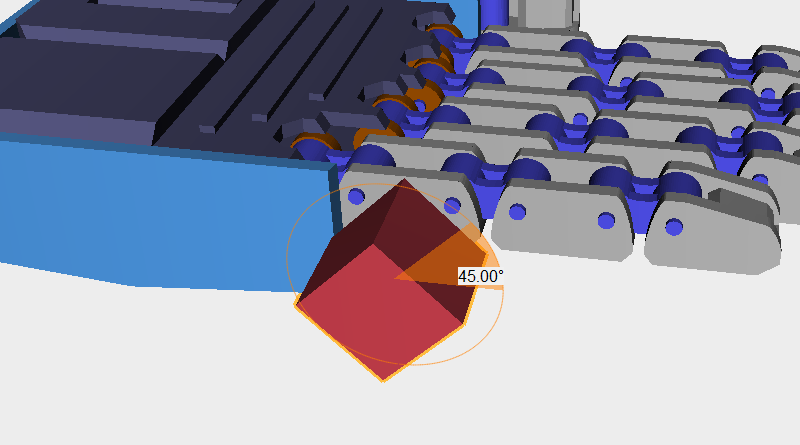
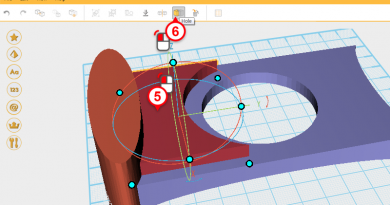
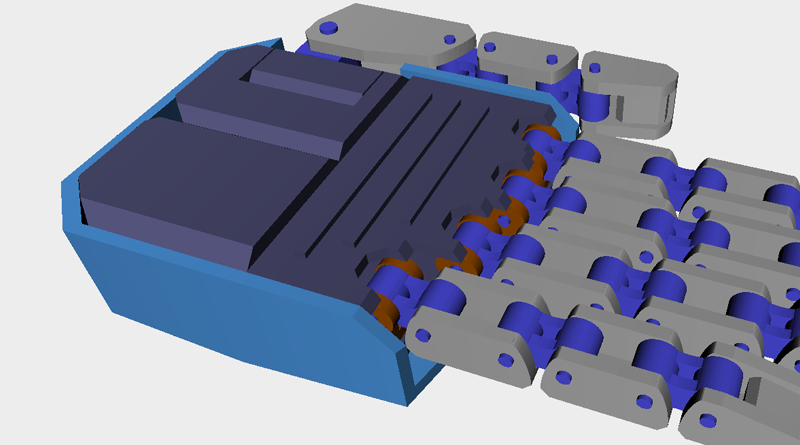
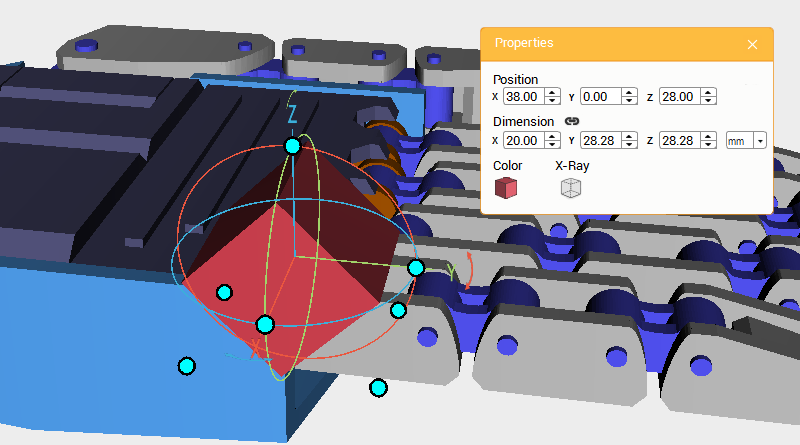 最后要对红圈处的直角进行切削,建立一个﹝Cube﹞对象,移动到手指根部附近的位置,对X轴旋转45度,接着将位置设定为X: 38,Y: 0,Z: 28,作为「切削」对象。
最后要对红圈处的直角进行切削,建立一个﹝Cube﹞对象,移动到手指根部附近的位置,对X轴旋转45度,接着将位置设定为X: 38,Y: 0,Z: 28,作为「切削」对象。 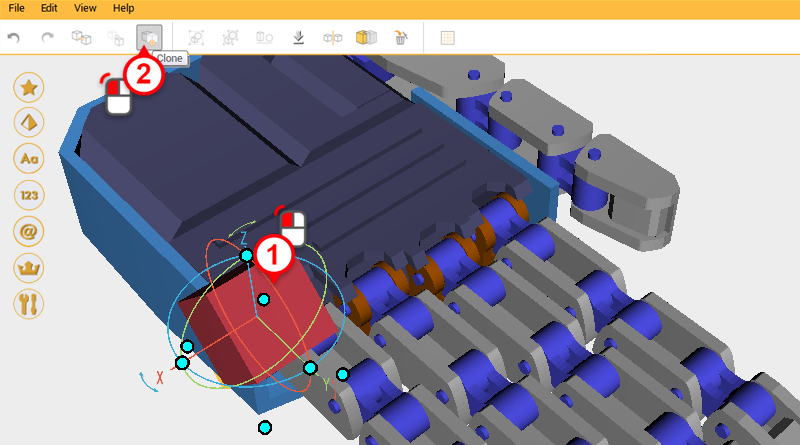
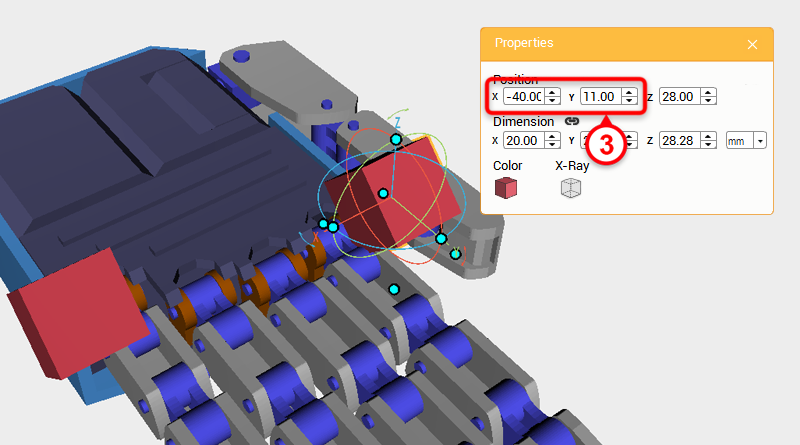 选取「切削」对象,按下﹝Clone﹞按钮,接着将位置的X值设定为-40,Y值设定为11。
选取「切削」对象,按下﹝Clone﹞按钮,接着将位置的X值设定为-40,Y值设定为11。 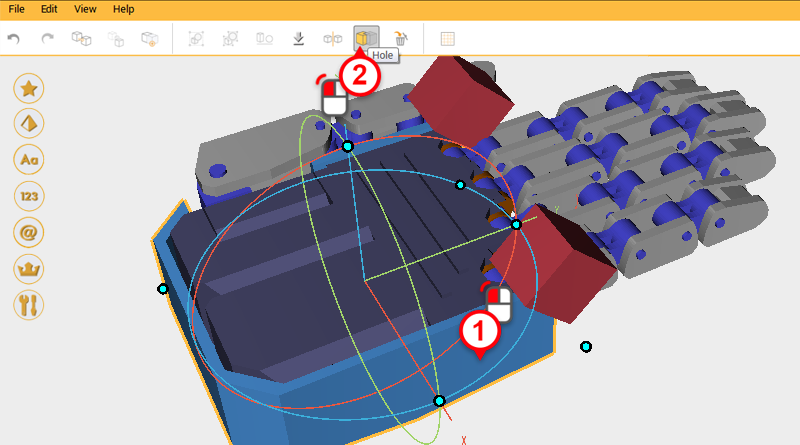
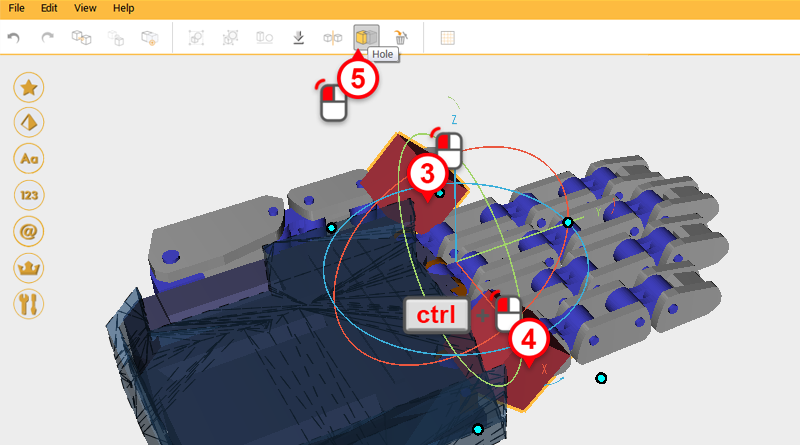
 利用这两个「切削」对象,将「手背护甲」对象切削出斜角。
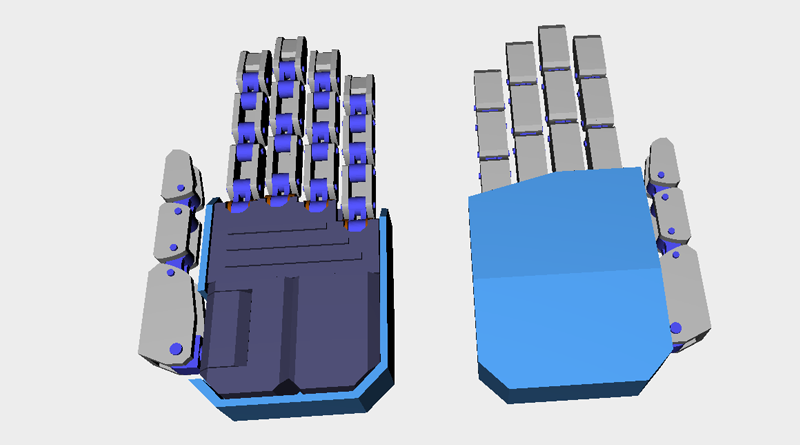
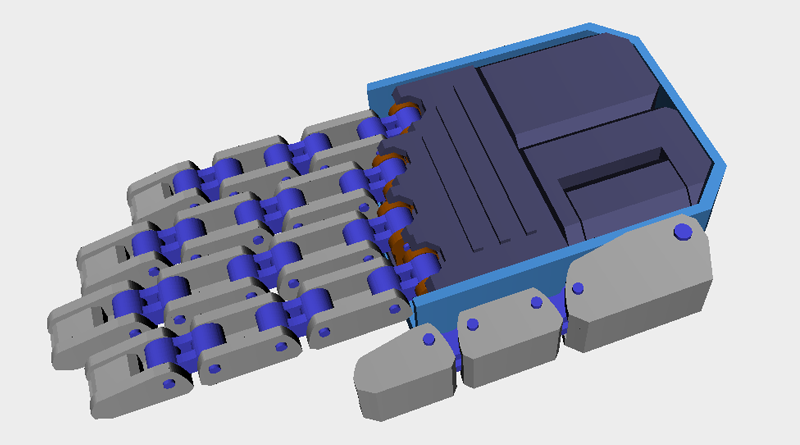
利用这两个「切削」对象,将「手背护甲」对象切削出斜角。 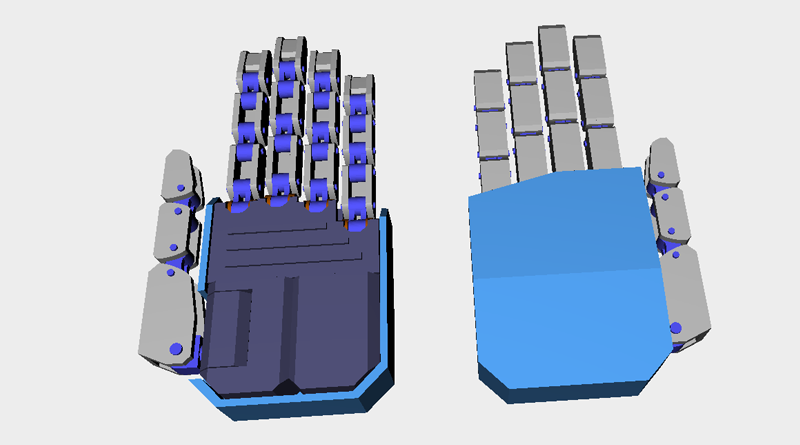 机械手掌模型已制作完成,可以准备进行后续的打印工作啰!
机械手掌模型已制作完成,可以准备进行后续的打印工作啰!