XYZmaker建模教學 – 機械手PART1
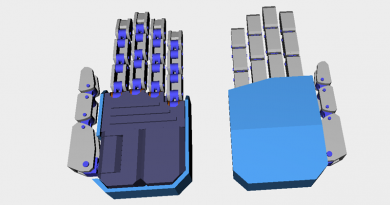
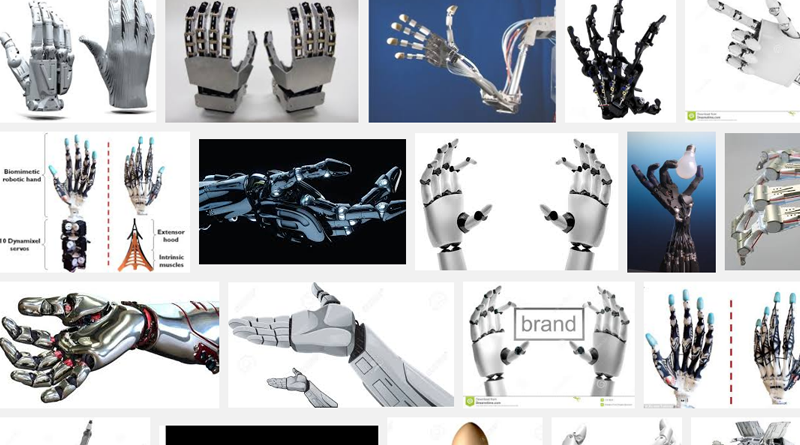 本篇教學是在XYZmaker中,利用基本的幾何3D模型,加以組合編輯後,建立一個機械風格手掌的模型,並具有如同真實手掌般的活動關節。 首先收集相關參考圖片,參考各類型機械手掌的設計。
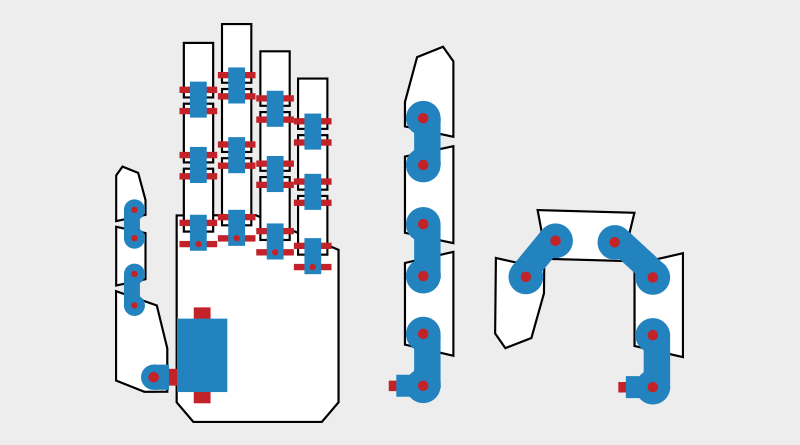
本篇教學是在XYZmaker中,利用基本的幾何3D模型,加以組合編輯後,建立一個機械風格手掌的模型,並具有如同真實手掌般的活動關節。 首先收集相關參考圖片,參考各類型機械手掌的設計。 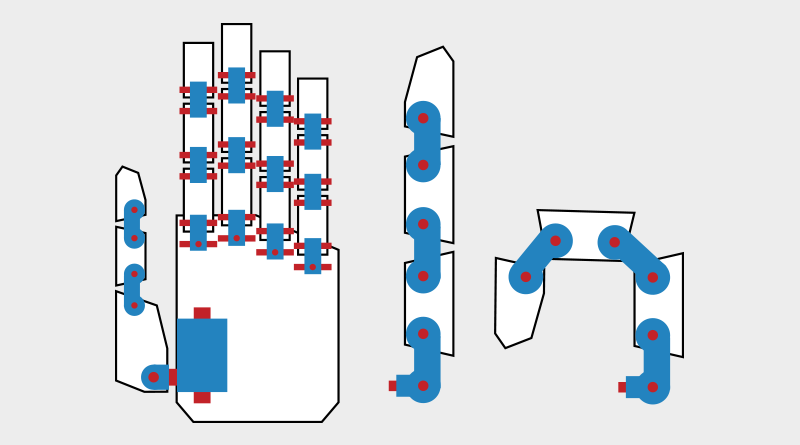 接著在紙上或繪圖軟體中,規劃所有需要製作的零件與關節配置,作為之後建模的參考,這次使用是類似鏈條的機構作為關節,讓手指關節能夠大範圍的活動。 圖中藍色部分是關節物件,紅色部分則是要設置轉軸的地方。
接著在紙上或繪圖軟體中,規劃所有需要製作的零件與關節配置,作為之後建模的參考,這次使用是類似鏈條的機構作為關節,讓手指關節能夠大範圍的活動。 圖中藍色部分是關節物件,紅色部分則是要設置轉軸的地方。 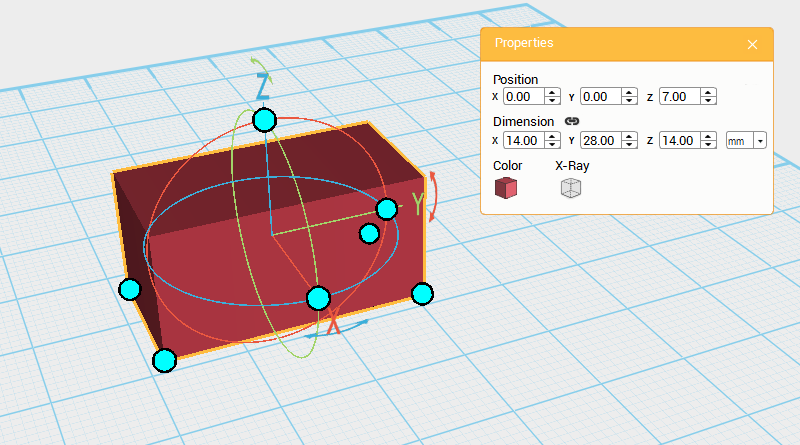 建立一個﹝Cube﹞物件,尺寸設定為X: 14,Y: 28,Z: 14 mm,位置設定為X: 0,Y: 0,Z: 7,作為「指節A」物件。
建立一個﹝Cube﹞物件,尺寸設定為X: 14,Y: 28,Z: 14 mm,位置設定為X: 0,Y: 0,Z: 7,作為「指節A」物件。 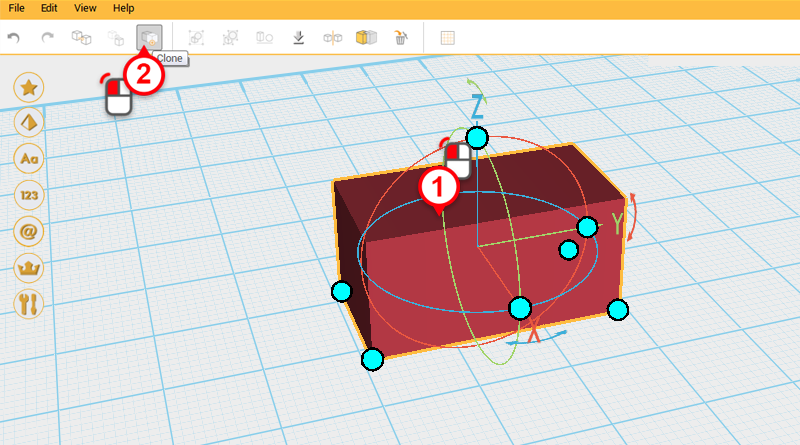
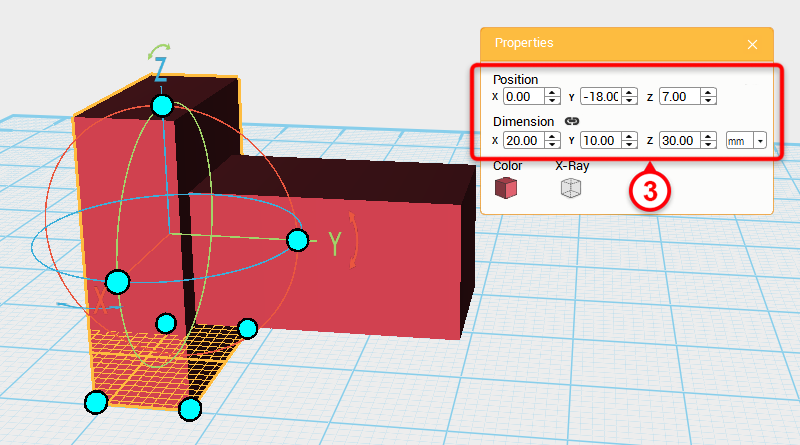 選取「指節A」物件,按下﹝Clone﹞按鈕,接著將尺寸設定為X: 20,Y: 10,Z: 30 mm,位置設定為X: 0,Y: -18,Z: 7,,作為「切削」物件。
選取「指節A」物件,按下﹝Clone﹞按鈕,接著將尺寸設定為X: 20,Y: 10,Z: 30 mm,位置設定為X: 0,Y: -18,Z: 7,,作為「切削」物件。 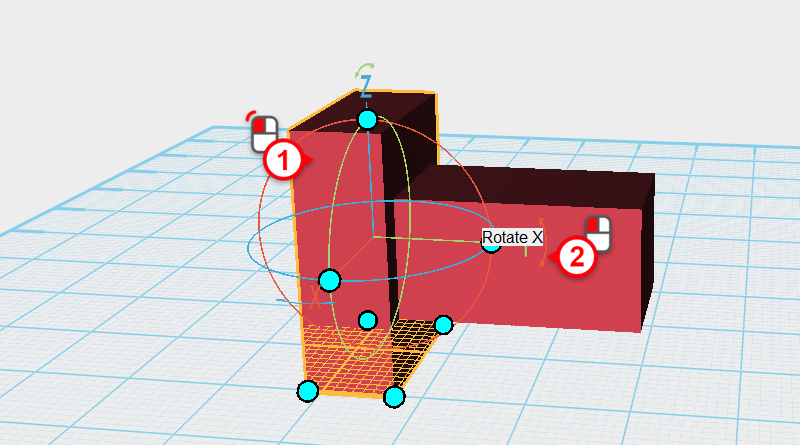
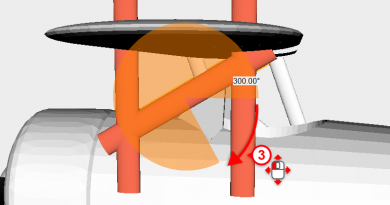
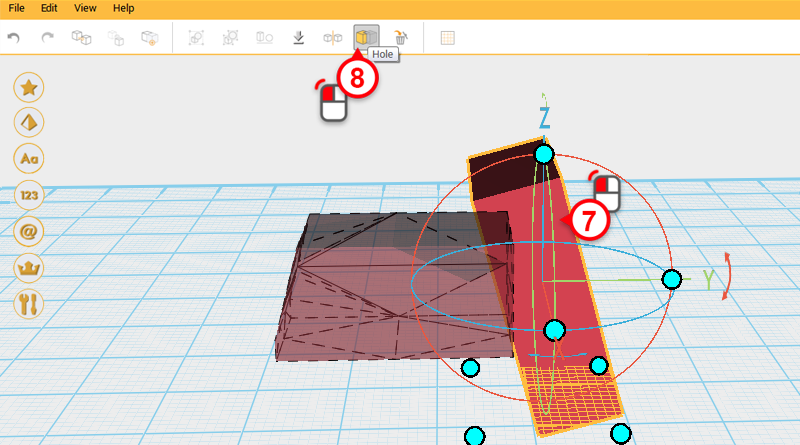
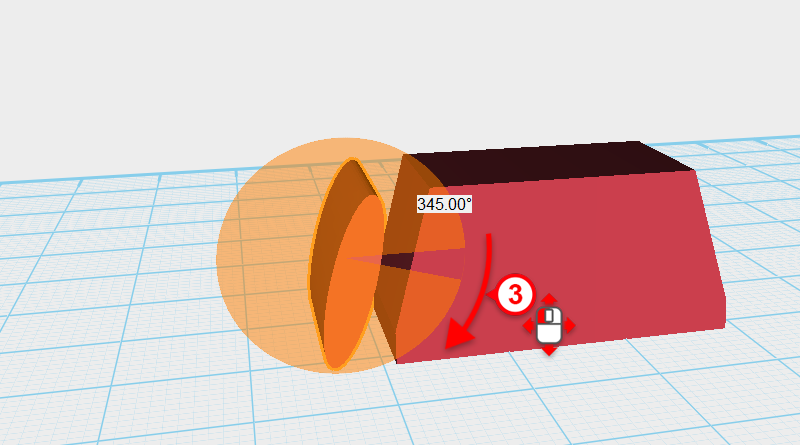
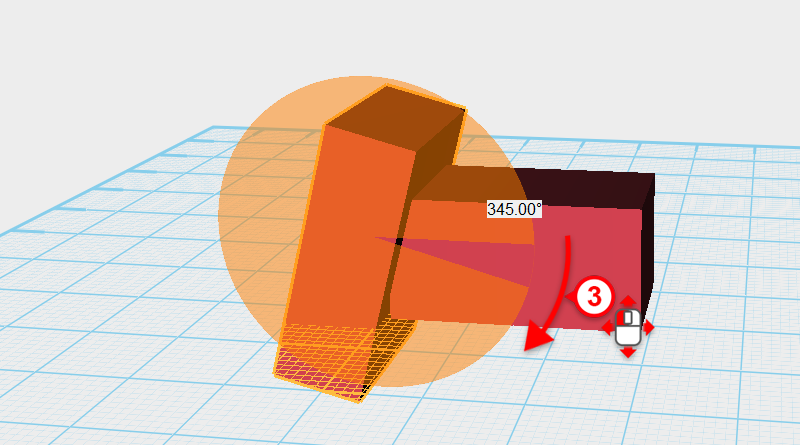 選取「切削」物件,按住控制器中Y字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為345度。
選取「切削」物件,按住控制器中Y字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為345度。 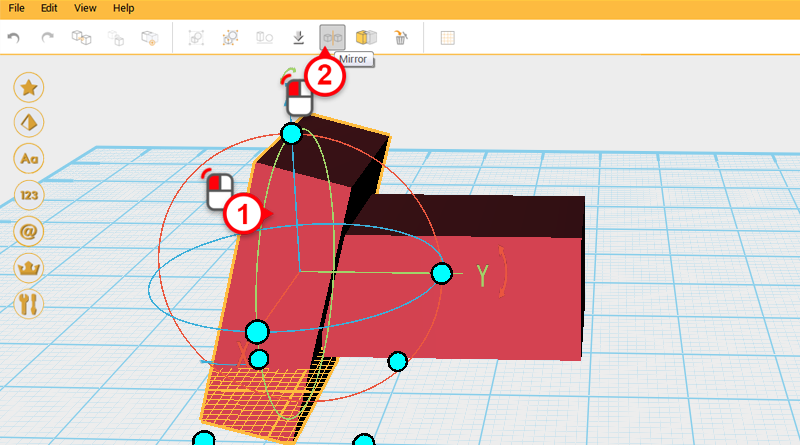
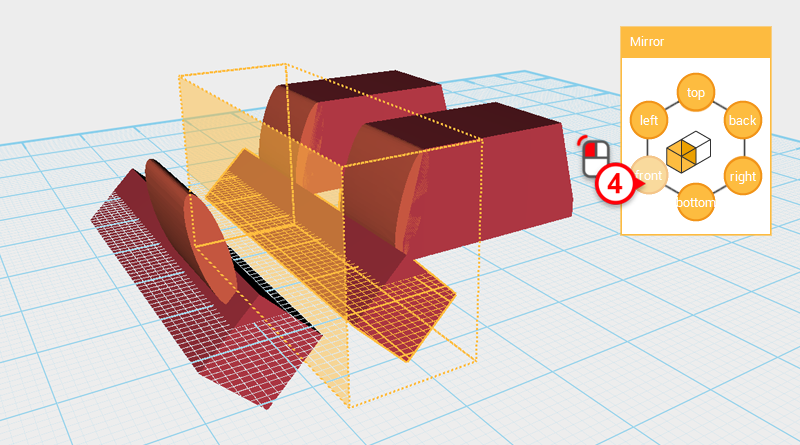
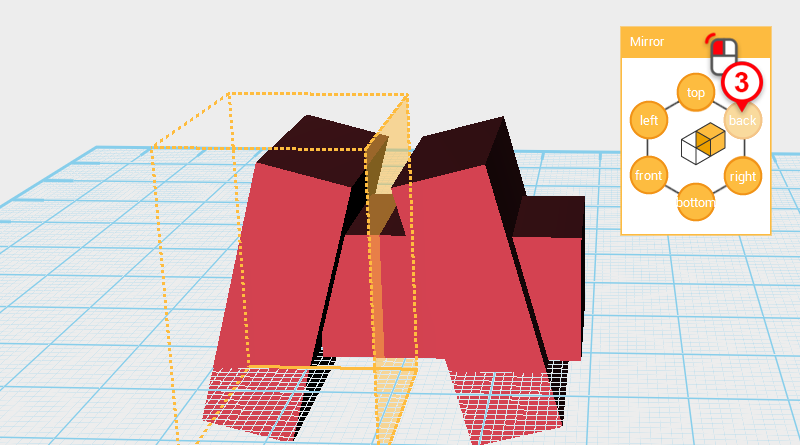 選取「切削」物件,按下﹝Mirror﹞按鈕,接著在Mirror面板中按下﹝back﹞按鈕。
選取「切削」物件,按下﹝Mirror﹞按鈕,接著在Mirror面板中按下﹝back﹞按鈕。 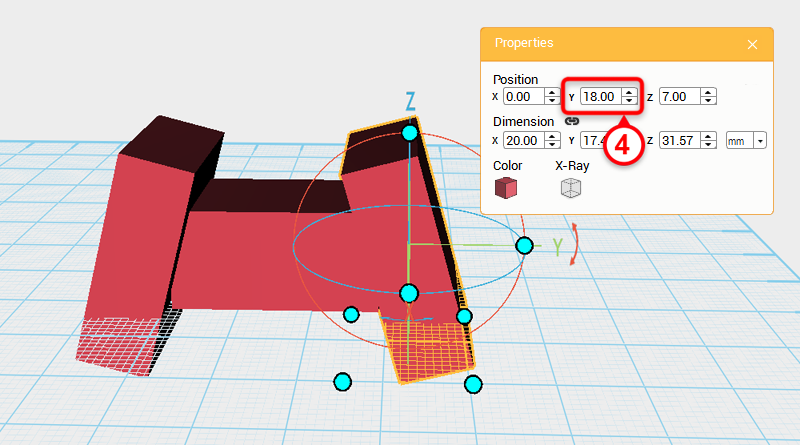 選取剛剛鏡射出的「切削」物件,將位置的Y值設定為18。
選取剛剛鏡射出的「切削」物件,將位置的Y值設定為18。 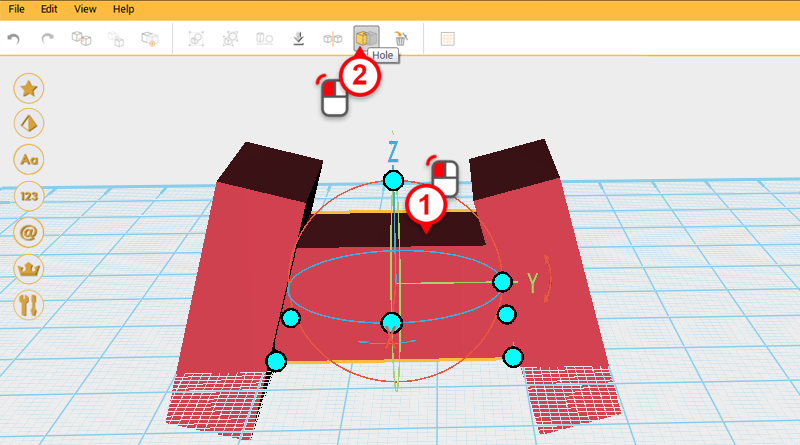
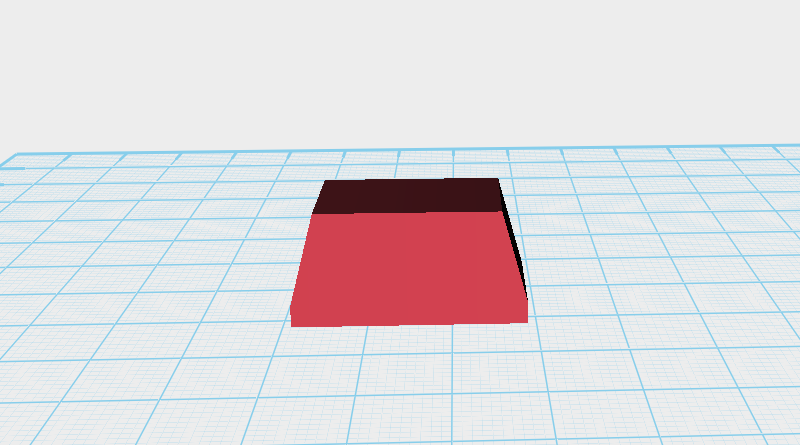 利用這兩個「切削」物件與﹝Hole﹞功能,將「指節A」物件切削出如圖的斜邊。
利用這兩個「切削」物件與﹝Hole﹞功能,將「指節A」物件切削出如圖的斜邊。 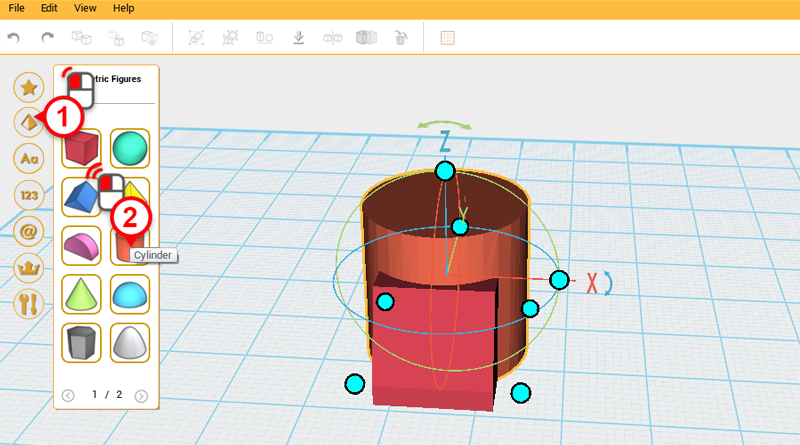
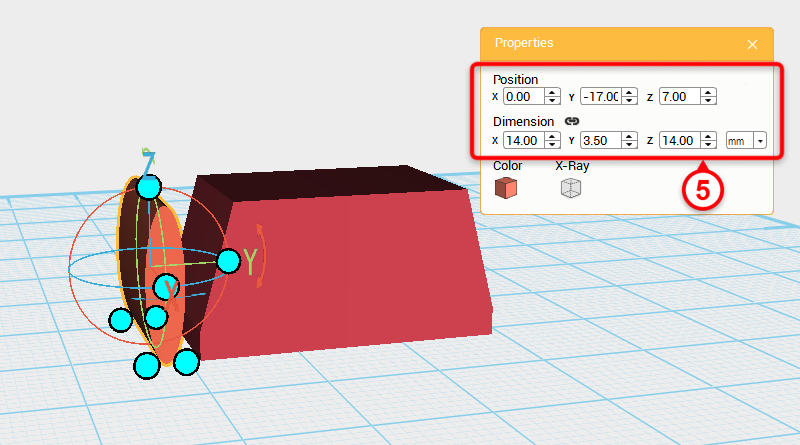 建立一個﹝Cylinder﹞物件,對Y軸旋轉90度後,將尺寸設定為X: 14,Y: 3.5,Z: 14 mm,位置設定為X: 0,Y: -17,Z: 7。
建立一個﹝Cylinder﹞物件,對Y軸旋轉90度後,將尺寸設定為X: 14,Y: 3.5,Z: 14 mm,位置設定為X: 0,Y: -17,Z: 7。 
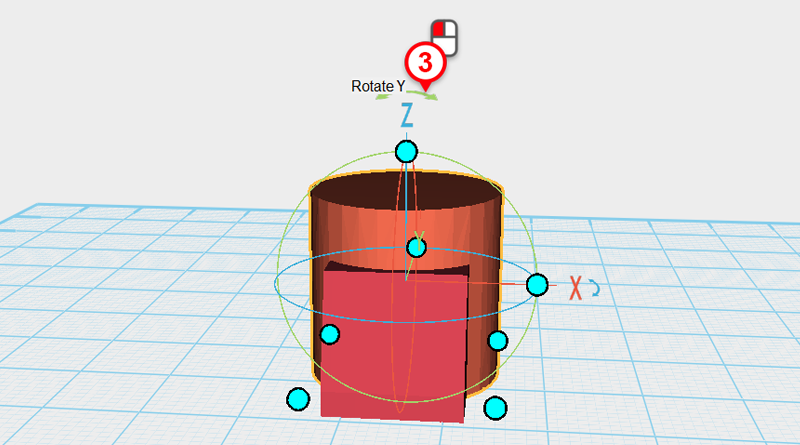
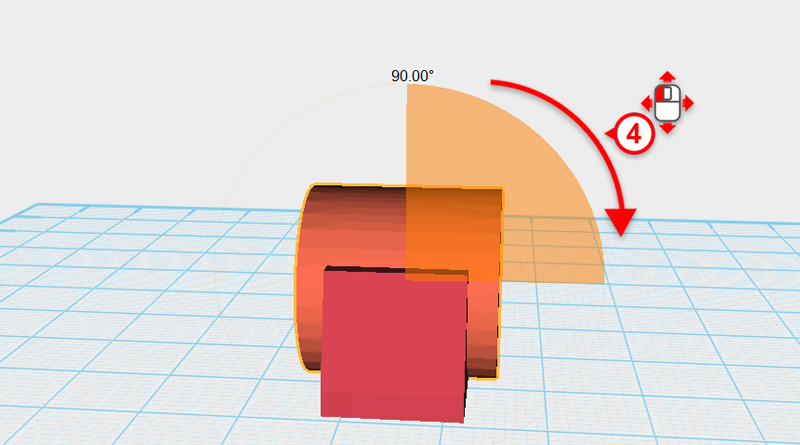
 選取﹝Cylinder﹞物件,按住控制器中Y字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為345度。
選取﹝Cylinder﹞物件,按住控制器中Y字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為345度。 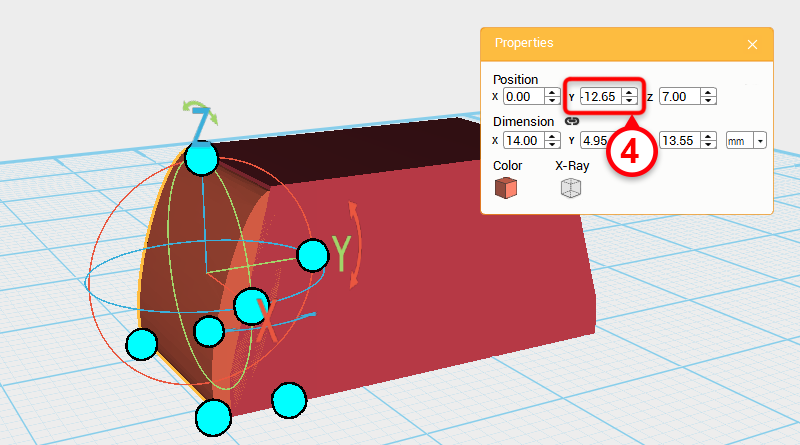 接著將位置的Y值設定為-12.65。
接著將位置的Y值設定為-12.65。 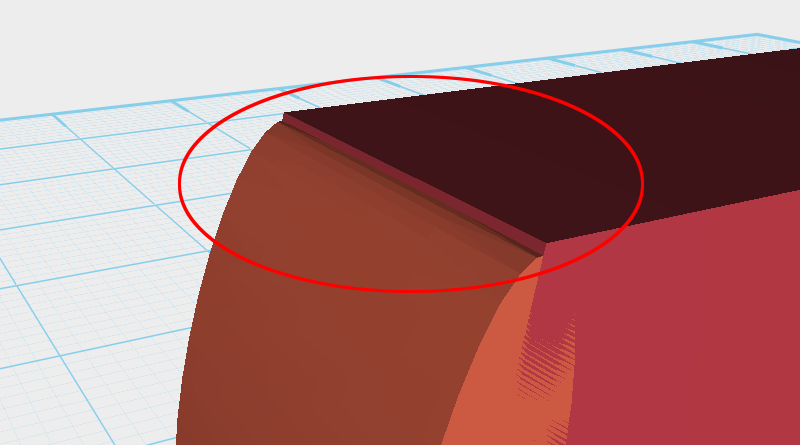 近距離觀察物件,發現邊緣的地方有落差。
近距離觀察物件,發現邊緣的地方有落差。 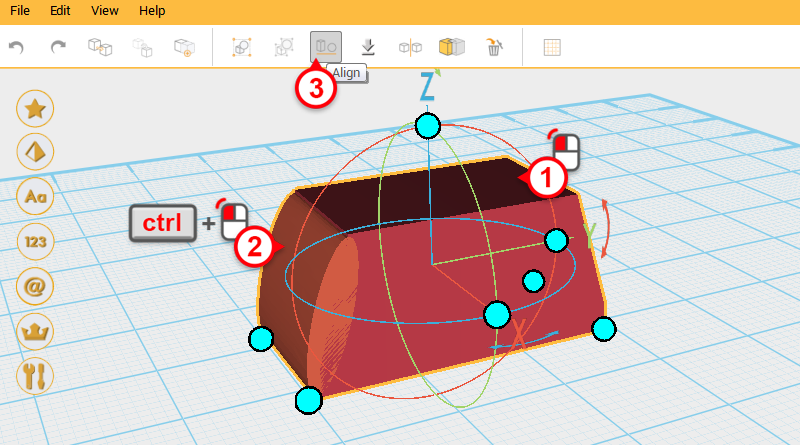 選取「指節A」物件,按住鍵盤的﹝ctrl﹞鍵再點擊﹝Cylinder﹞物件完成加選,接著按下﹝Align﹞按鈕。
選取「指節A」物件,按住鍵盤的﹝ctrl﹞鍵再點擊﹝Cylinder﹞物件完成加選,接著按下﹝Align﹞按鈕。 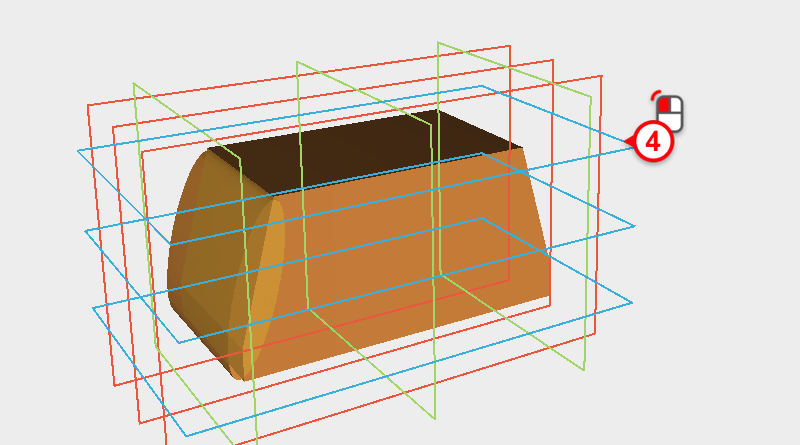 點擊圖中的藍色框線,將物件向上對齊。
點擊圖中的藍色框線,將物件向上對齊。 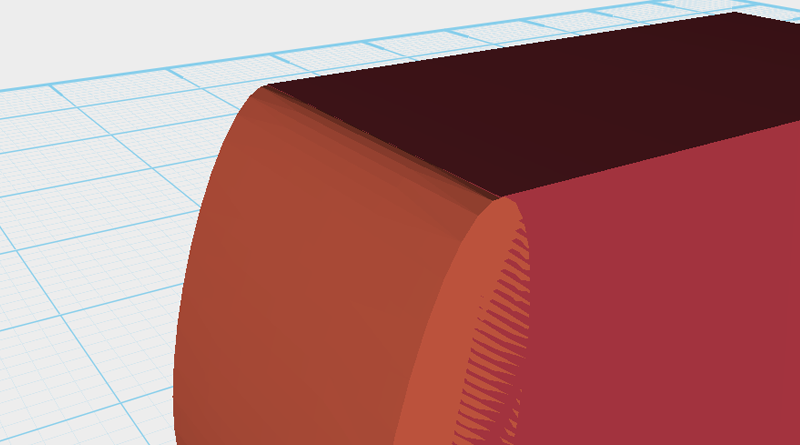 再拉近檢查物件的狀況,可以看到落差幾乎消失了。
再拉近檢查物件的狀況,可以看到落差幾乎消失了。 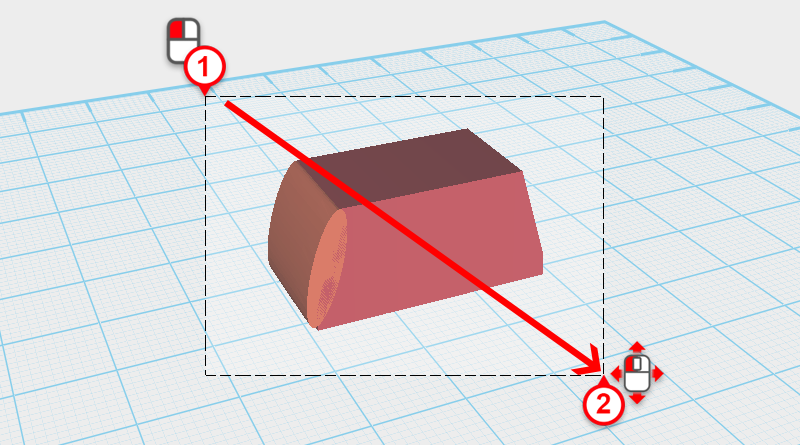
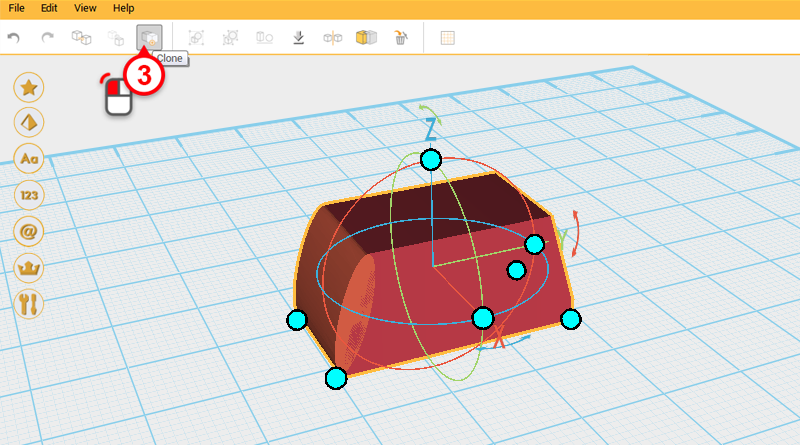
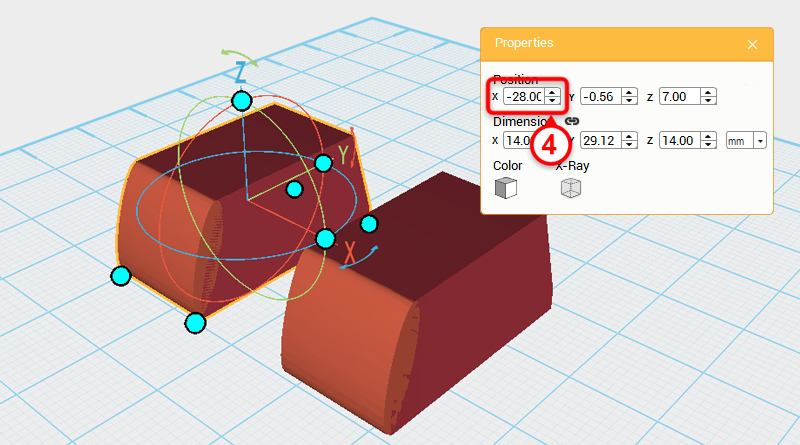 框選圖中的物件,按下﹝Clone﹞按鈕,接著將位置的X值設定為-28。
框選圖中的物件,按下﹝Clone﹞按鈕,接著將位置的X值設定為-28。 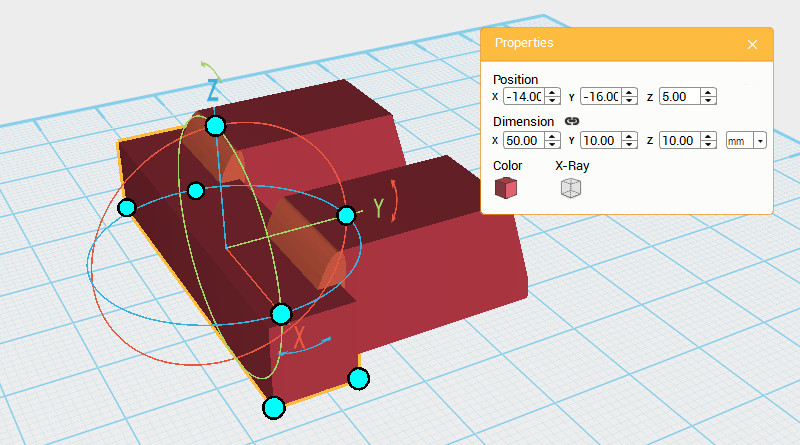 建立一個﹝Cube﹞物件,尺寸設定為X: 50,Y: 10,Z: 10 mm,位置設定為X: -14,Y: -16,Z: 5,作為「切削」物件。
建立一個﹝Cube﹞物件,尺寸設定為X: 50,Y: 10,Z: 10 mm,位置設定為X: -14,Y: -16,Z: 5,作為「切削」物件。 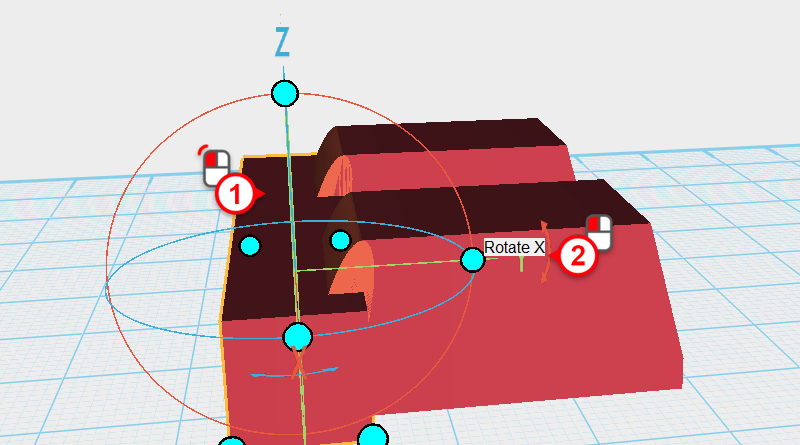
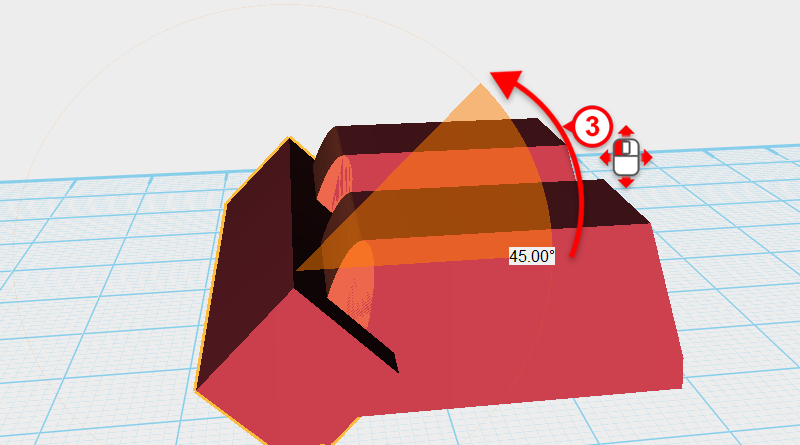 選取「切削」物件,按住控制器中Y字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為45度。
選取「切削」物件,按住控制器中Y字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為45度。 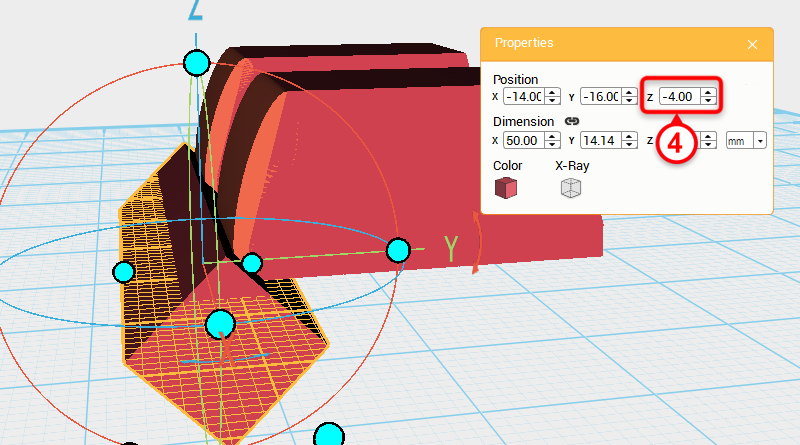 接著將位置的Z值設定為-4。
接著將位置的Z值設定為-4。 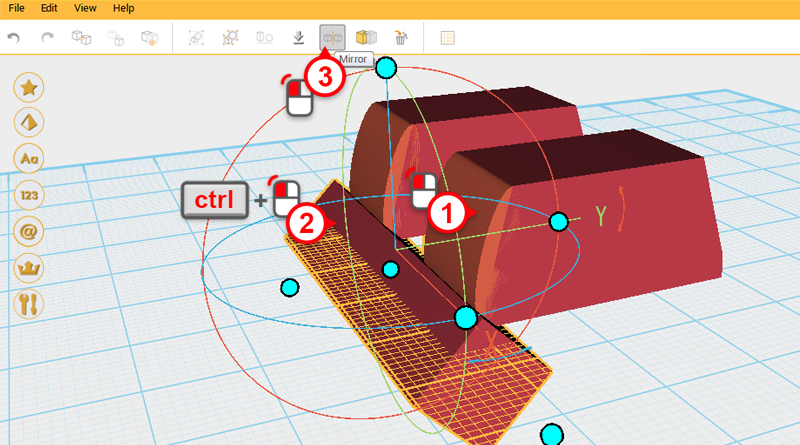
 選取圖中的兩個物件,按下﹝Mirror﹞按鈕,接著在Mirror面板中按下﹝front﹞按鈕。
選取圖中的兩個物件,按下﹝Mirror﹞按鈕,接著在Mirror面板中按下﹝front﹞按鈕。 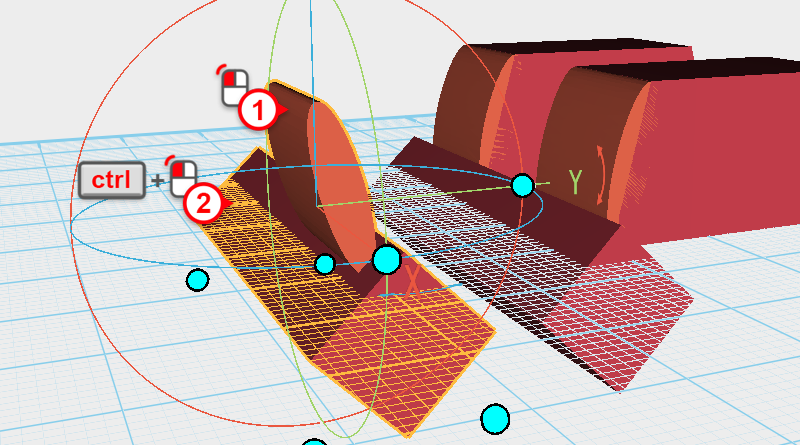
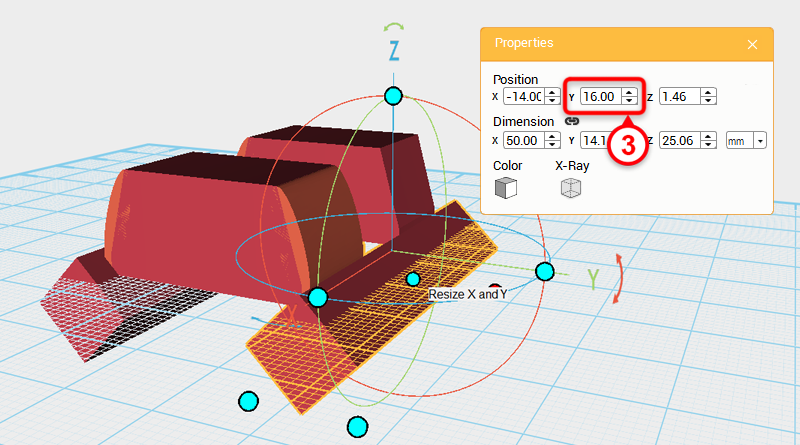 選取剛剛鏡射出的兩個物件,將位置的Y值設定為16。
選取剛剛鏡射出的兩個物件,將位置的Y值設定為16。 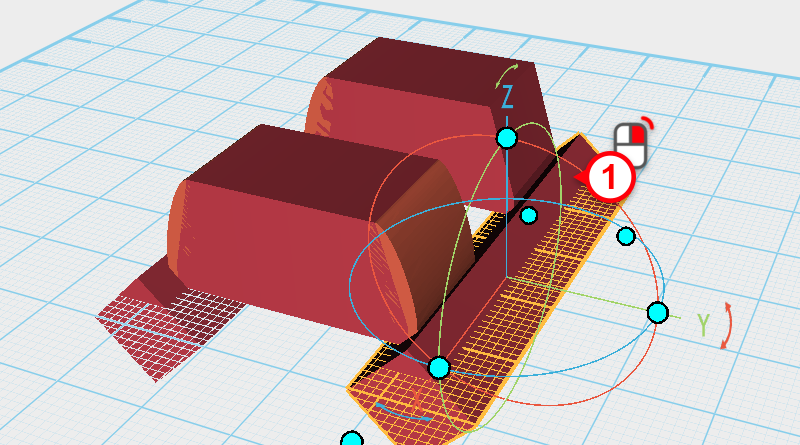
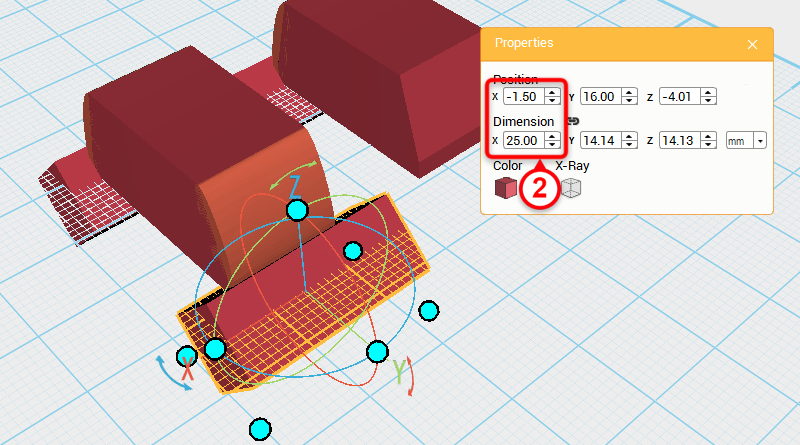 選取圖中的﹝Cube﹞物件,將尺寸的X值設定為25,位置的X值設定為-1.5。
選取圖中的﹝Cube﹞物件,將尺寸的X值設定為25,位置的X值設定為-1.5。 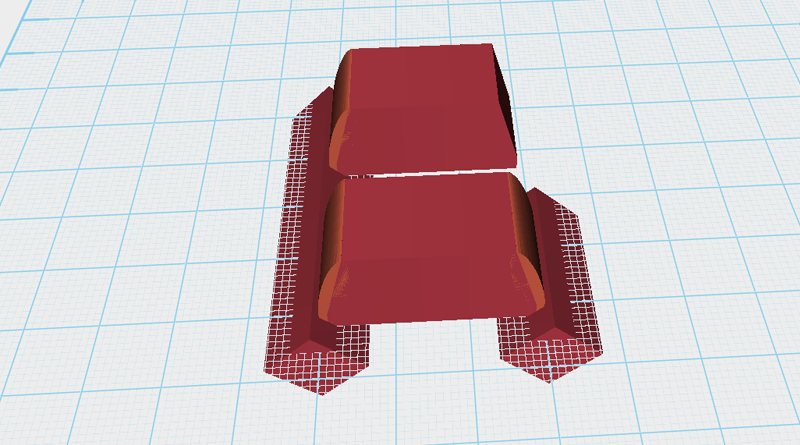 到目前為止物件間的位置關係應如圖所示。
到目前為止物件間的位置關係應如圖所示。 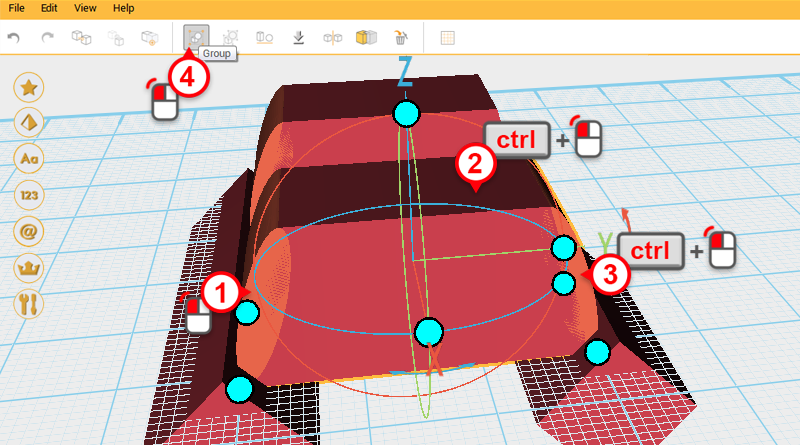 選取圖中的三個物件,按下﹝Group﹞按鈕,作為「指節A」物件。
選取圖中的三個物件,按下﹝Group﹞按鈕,作為「指節A」物件。 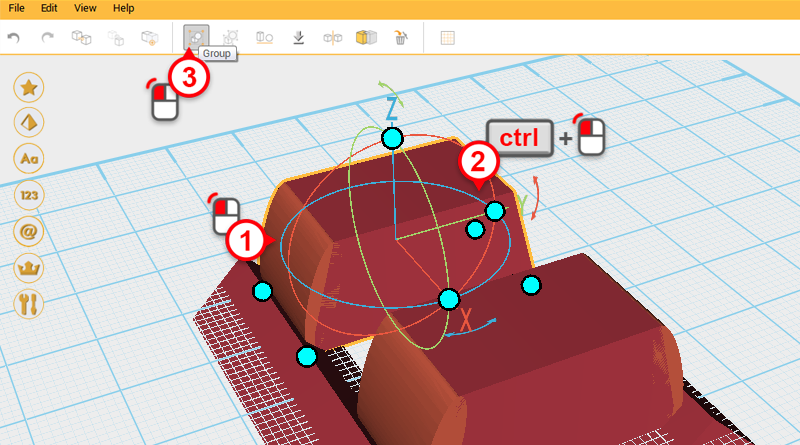 選取圖中的兩個物件,按下﹝Group﹞按鈕,作為「指尖」物件。
選取圖中的兩個物件,按下﹝Group﹞按鈕,作為「指尖」物件。 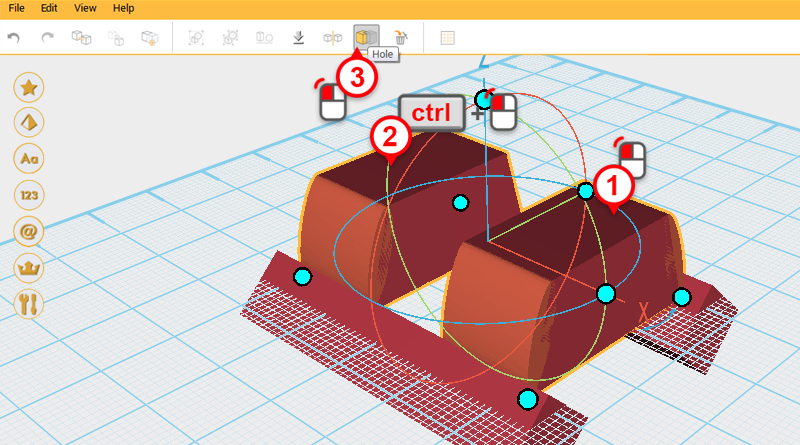 選取「指節A」物件,按住鍵盤的﹝ctrl﹞鍵再點擊「指尖」物件完成加選,接著按下﹝Hole﹞按鈕。
選取「指節A」物件,按住鍵盤的﹝ctrl﹞鍵再點擊「指尖」物件完成加選,接著按下﹝Hole﹞按鈕。 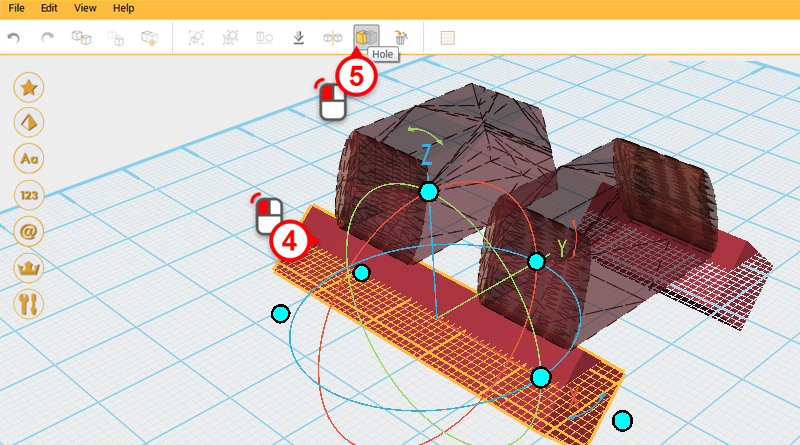
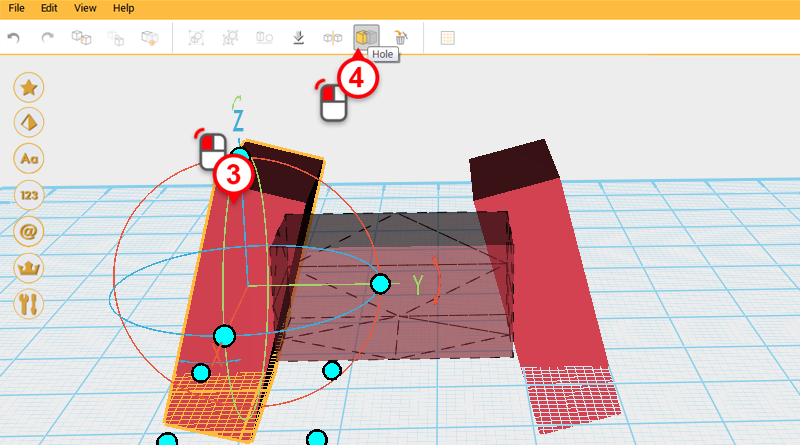
 接著選取圖中的「切削」物件,再次按下﹝Hole﹞按鈕。
接著選取圖中的「切削」物件,再次按下﹝Hole﹞按鈕。 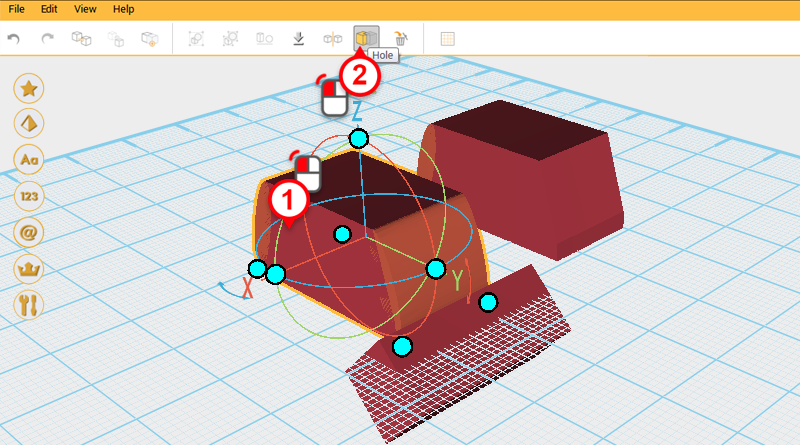 選取「指節A」物件,接著按下﹝Hole﹞按鈕。
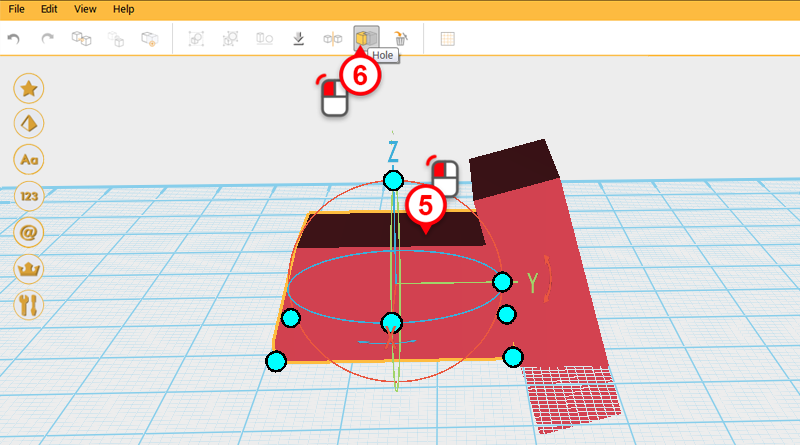
選取「指節A」物件,接著按下﹝Hole﹞按鈕。 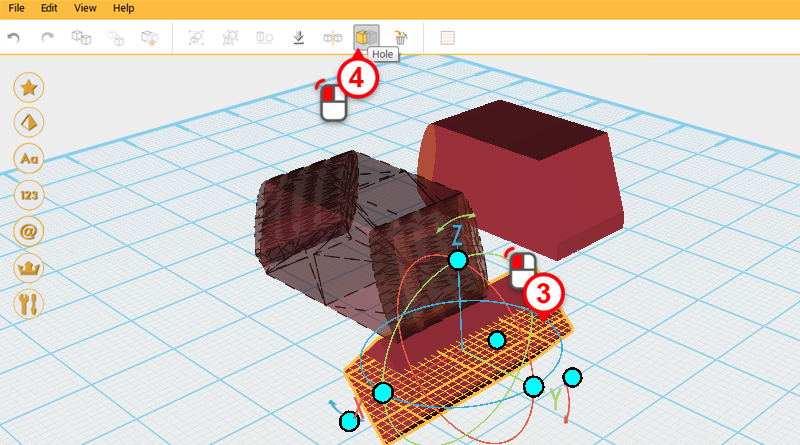 接著選取圖中的「切削」物件,再次按下﹝Hole﹞按鈕,完成另一端的切削。
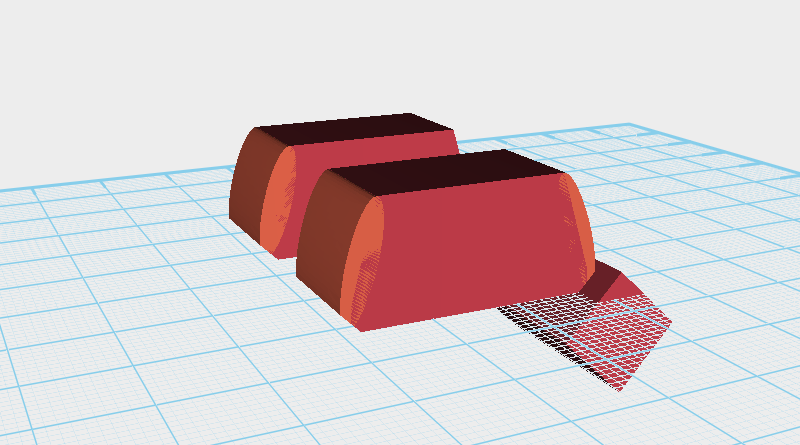
接著選取圖中的「切削」物件,再次按下﹝Hole﹞按鈕,完成另一端的切削。 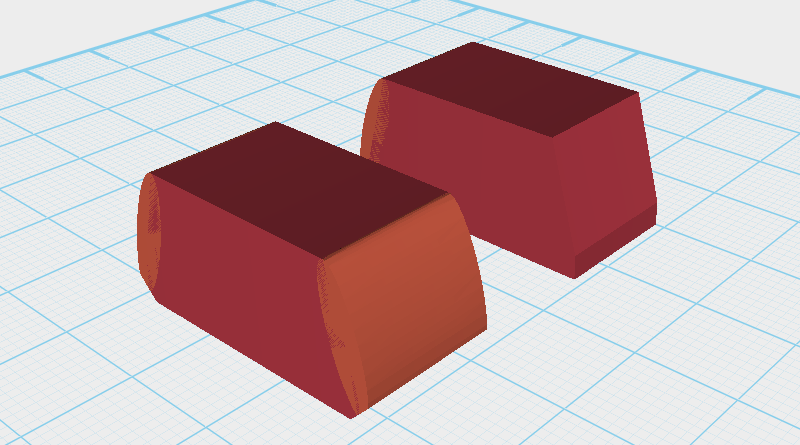 切削完成的物件應如圖所示。
切削完成的物件應如圖所示。