XYZmaker建模教學 – 機械手PART8
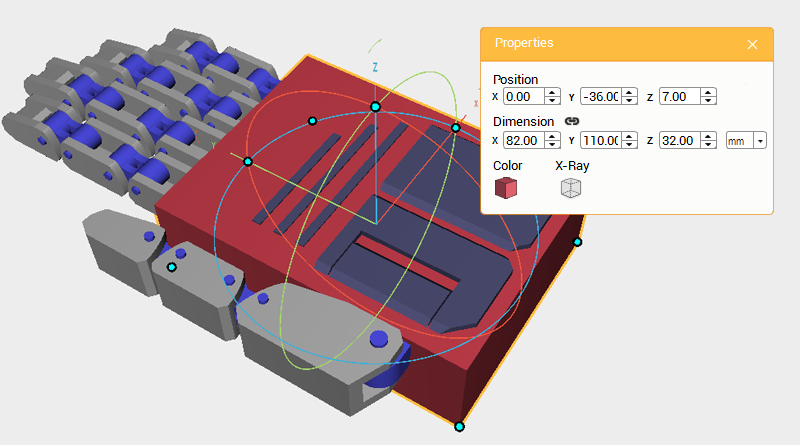 接下來要製作手背的護甲,首先將「工作平面網格」關閉以方便檢視物件。建立一個﹝Cube﹞物件,尺寸設定為X: 82,Y: 110,Z: 32 mm,位置設定為X: 0,Y: -36,Z: 7,作為「手背護甲」物件。
接下來要製作手背的護甲,首先將「工作平面網格」關閉以方便檢視物件。建立一個﹝Cube﹞物件,尺寸設定為X: 82,Y: 110,Z: 32 mm,位置設定為X: 0,Y: -36,Z: 7,作為「手背護甲」物件。 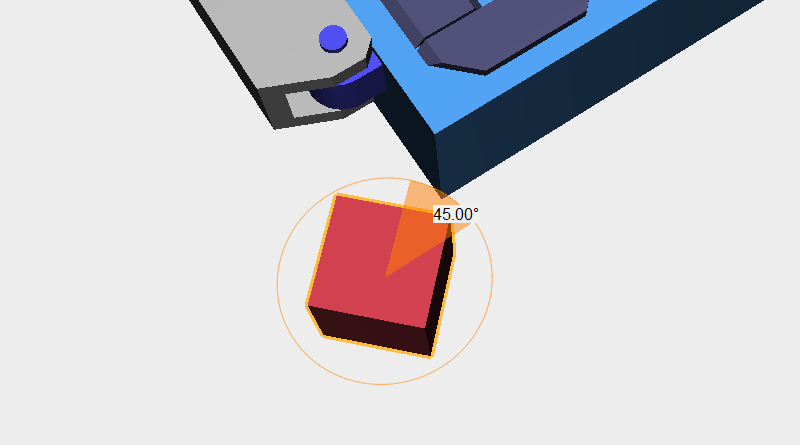 再來要配合「掌心」物件的形狀,對「手背護甲」物件切削出斜角。建立一個﹝Cube﹞物件,移動到「手背護甲」物件的旁邊,對Z軸旋轉45度,作為「切削」物件。
再來要配合「掌心」物件的形狀,對「手背護甲」物件切削出斜角。建立一個﹝Cube﹞物件,移動到「手背護甲」物件的旁邊,對Z軸旋轉45度,作為「切削」物件。 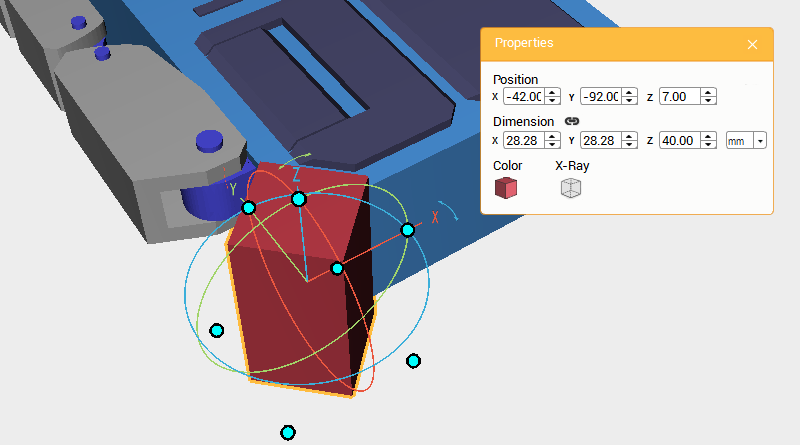 將「切削」物件的尺寸的Z值設定為40mm,位置設定為X: -42,Y: -92,Z: 7。
將「切削」物件的尺寸的Z值設定為40mm,位置設定為X: -42,Y: -92,Z: 7。 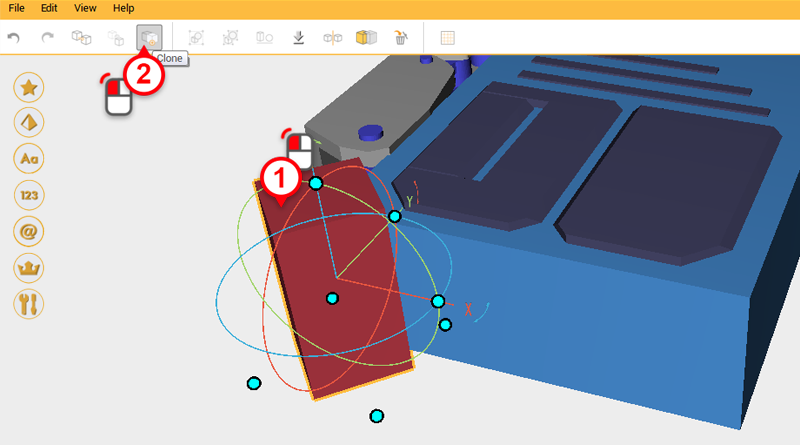
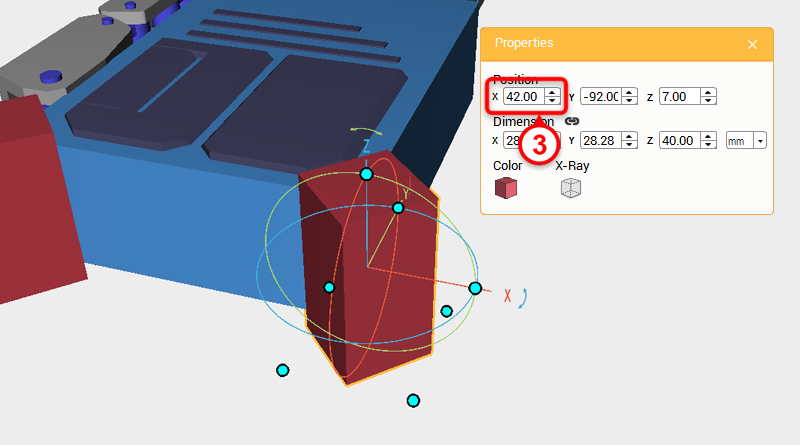 選取「切削」物件,按下﹝Clone﹞按鈕,接著將位置的X值設定為42。
選取「切削」物件,按下﹝Clone﹞按鈕,接著將位置的X值設定為42。 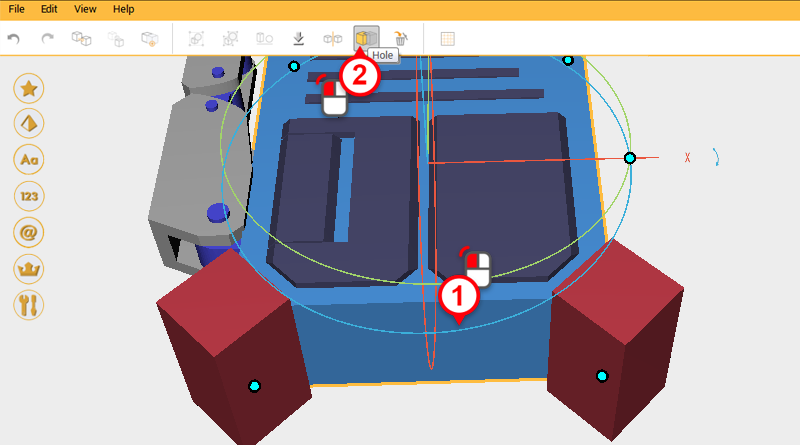
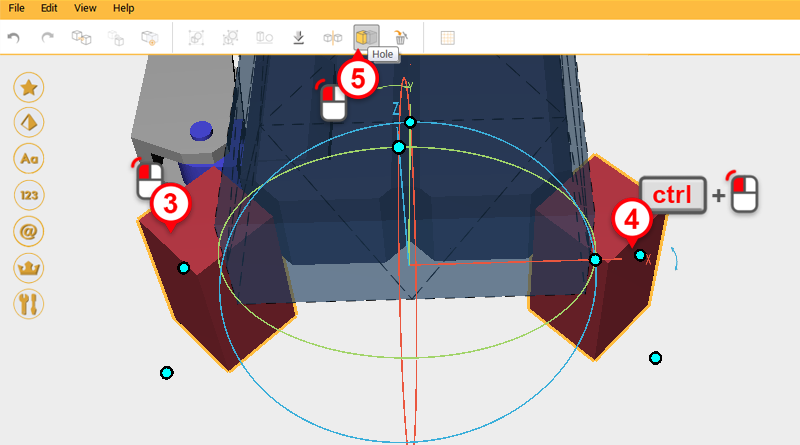
 利用這兩個「切削」物件與﹝Hole﹞功能,將「手背護甲」物件切削出斜角。
利用這兩個「切削」物件與﹝Hole﹞功能,將「手背護甲」物件切削出斜角。 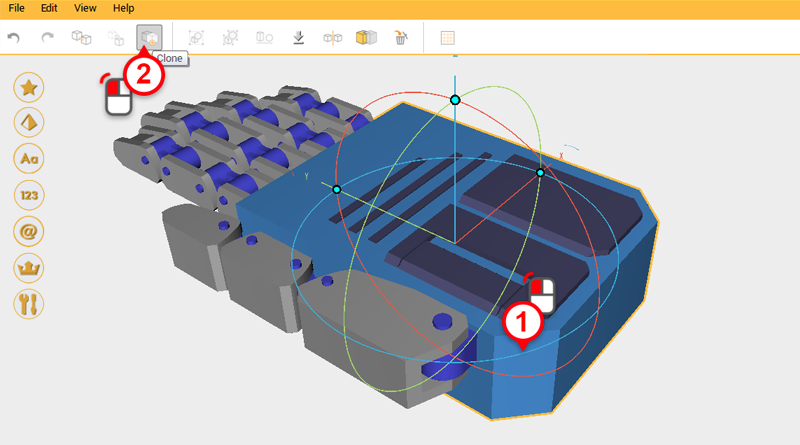
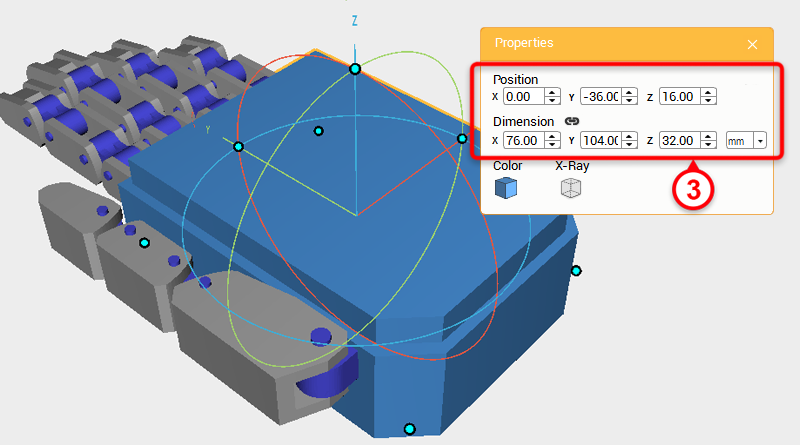 選取「手背護甲」物件,按下﹝Clone﹞按鈕,接著將尺寸設定為X: 76,Y: 104,Z: 32 mm,位置的Z值設定為16,作為「切削」物件。
選取「手背護甲」物件,按下﹝Clone﹞按鈕,接著將尺寸設定為X: 76,Y: 104,Z: 32 mm,位置的Z值設定為16,作為「切削」物件。 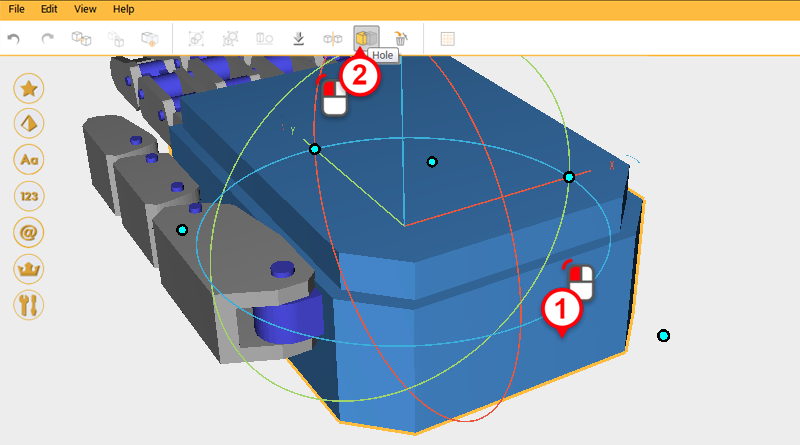
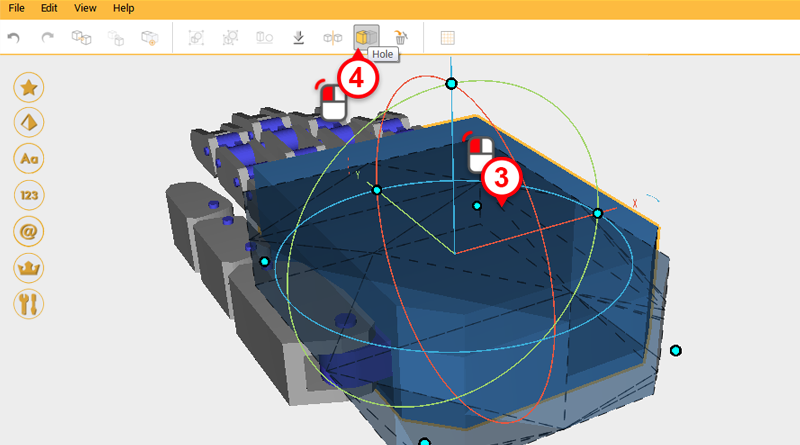
 利用「切削」物件與﹝Hole﹞功能,將「手背護甲」物件挖出內部的空間。
利用「切削」物件與﹝Hole﹞功能,將「手背護甲」物件挖出內部的空間。 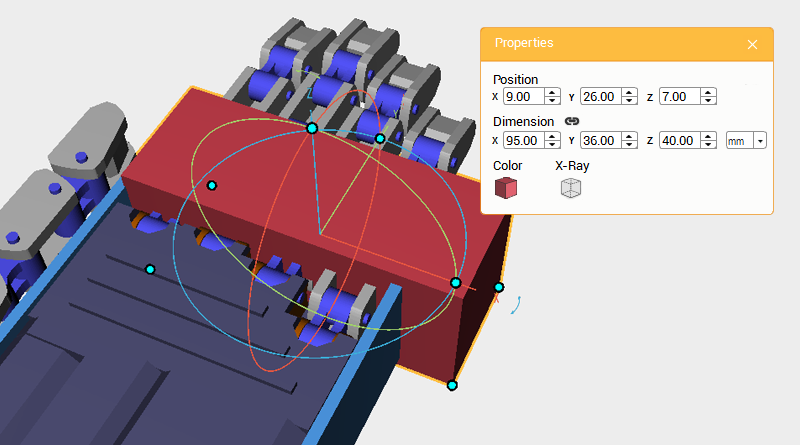 「手背護甲」物件的前方還需要再次切削,挖出讓手指伸出的空間。建立一個﹝Cube﹞物件,尺寸設定為X: 95,Y: 36,Z: 40 mm,位置設定為X: 9,Y: 26,Z: 7,作為「切削」物件。
「手背護甲」物件的前方還需要再次切削,挖出讓手指伸出的空間。建立一個﹝Cube﹞物件,尺寸設定為X: 95,Y: 36,Z: 40 mm,位置設定為X: 9,Y: 26,Z: 7,作為「切削」物件。 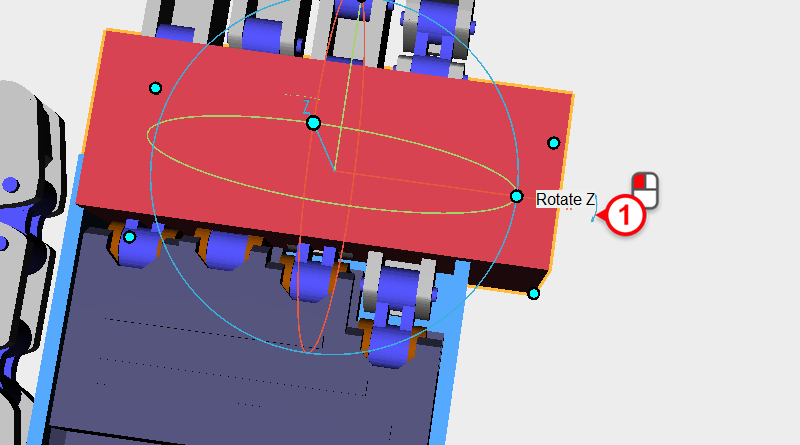
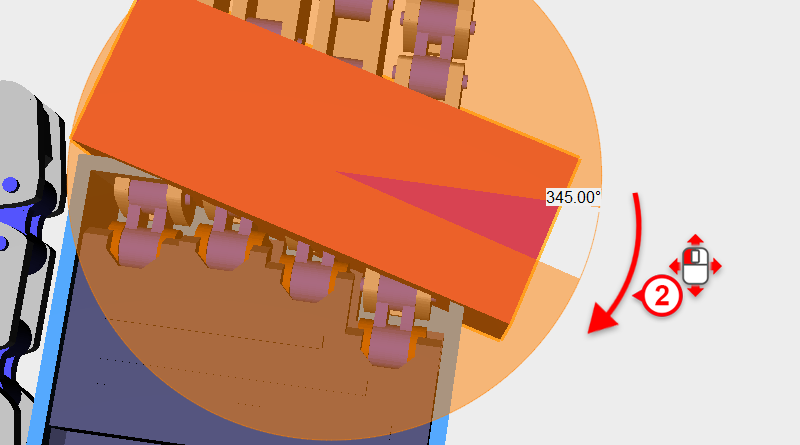 選取「切削」物件,按住控制器中X字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為345度。
選取「切削」物件,按住控制器中X字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為345度。 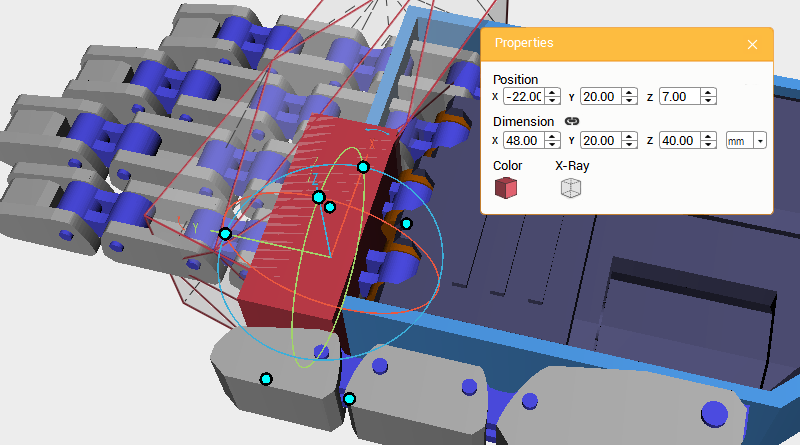 再建立一個﹝Cube﹞物件,尺寸設定為X: 48,Y: 20,Z: 40 mm,位置設定為X: -22,Y: 20,Z: 7,作為「切削」物件。
再建立一個﹝Cube﹞物件,尺寸設定為X: 48,Y: 20,Z: 40 mm,位置設定為X: -22,Y: 20,Z: 7,作為「切削」物件。 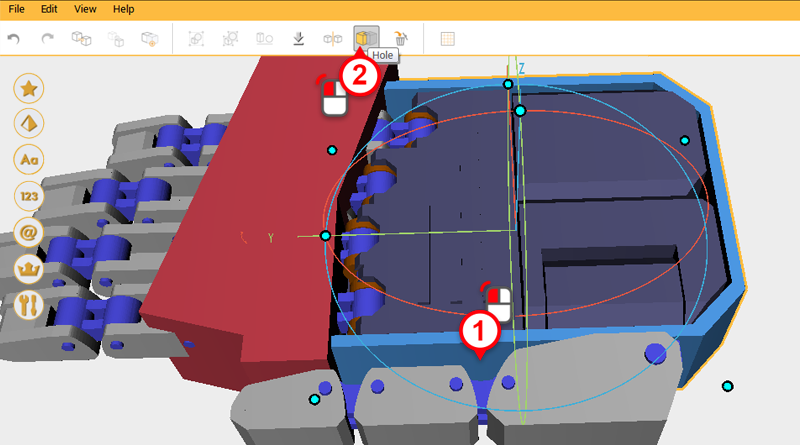
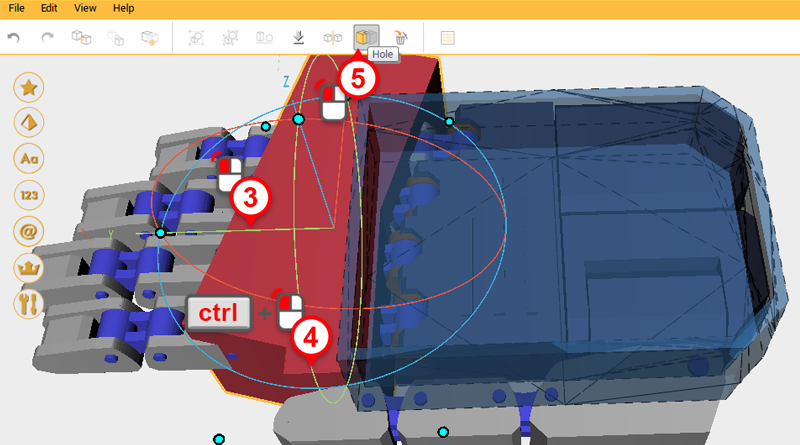
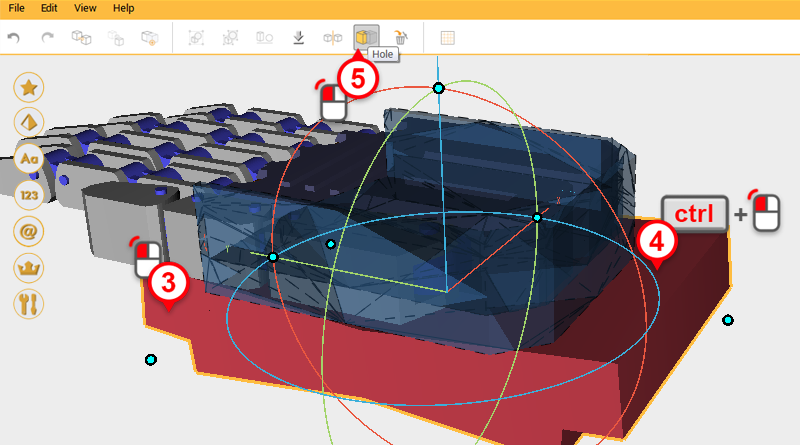
 利用這兩個「切削」物件與﹝Hole﹞功能,將「手背護甲」物件前方切削掉。
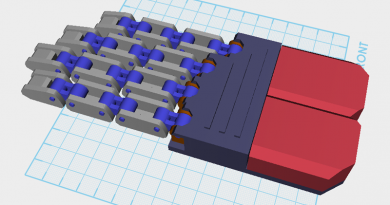
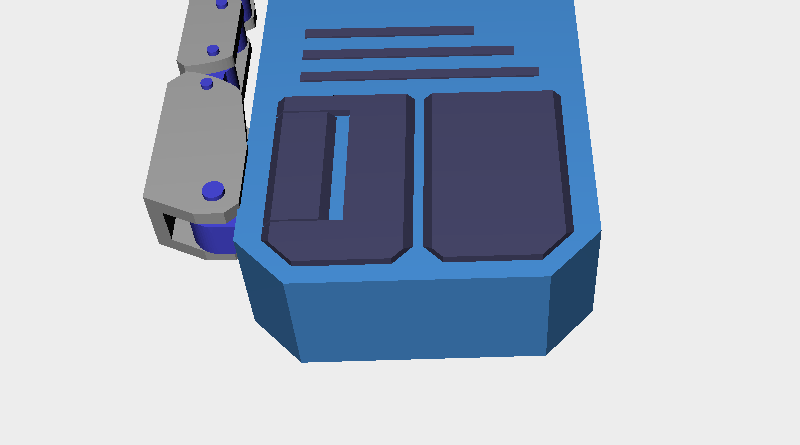
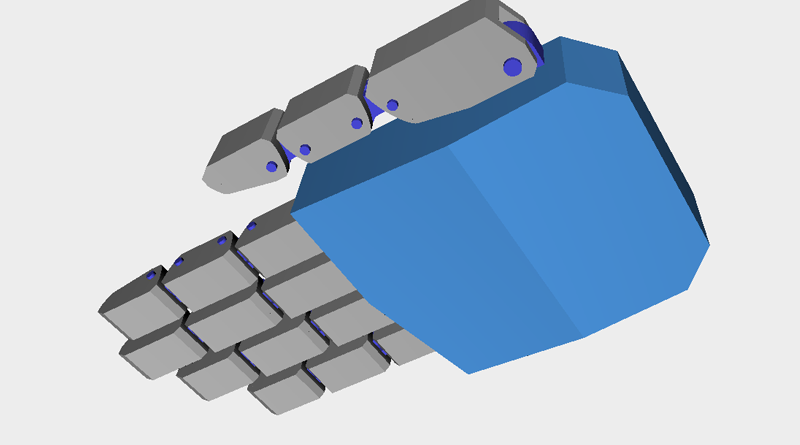
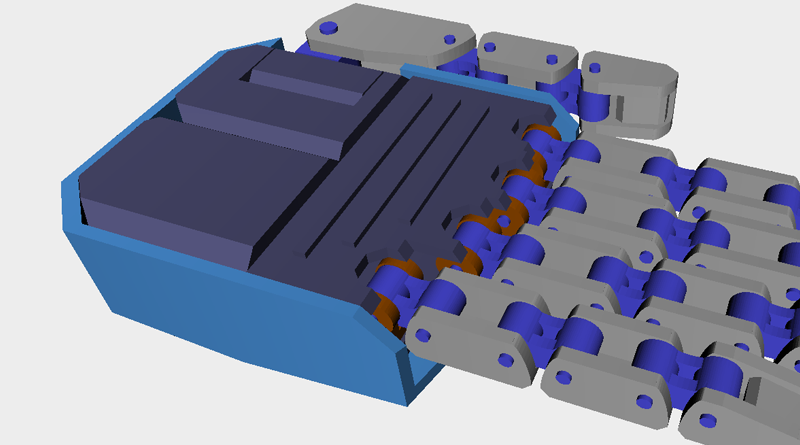
利用這兩個「切削」物件與﹝Hole﹞功能,將「手背護甲」物件前方切削掉。 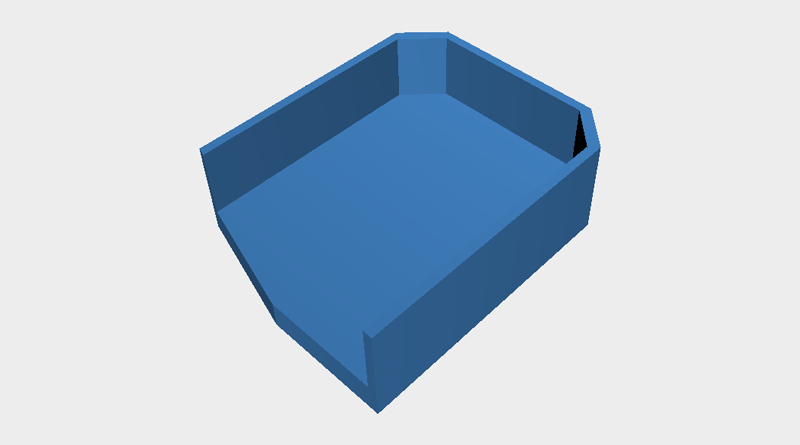 在此階段若單獨檢視「手背護甲」物件,應如圖中所顯示的形狀。
在此階段若單獨檢視「手背護甲」物件,應如圖中所顯示的形狀。 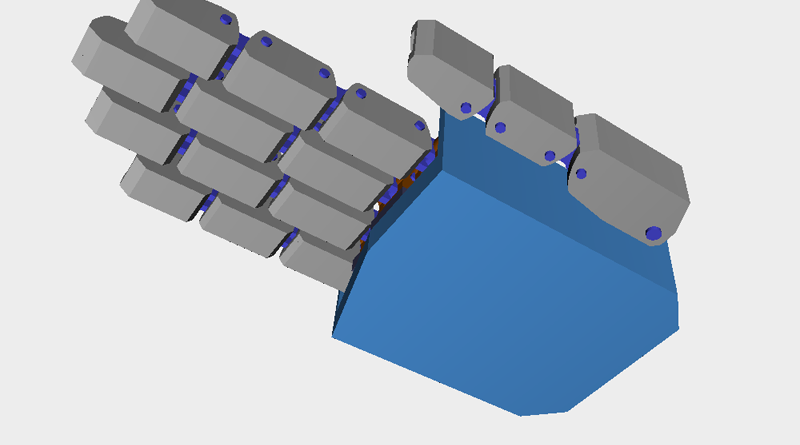 所有模型已大致完成,但檢視手背部分,發現太過平坦單調,因此需要再次加工,增加外觀上的變化。
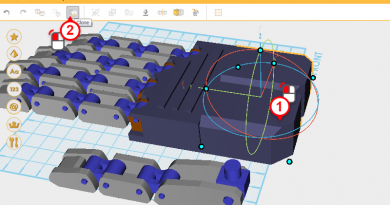
所有模型已大致完成,但檢視手背部分,發現太過平坦單調,因此需要再次加工,增加外觀上的變化。 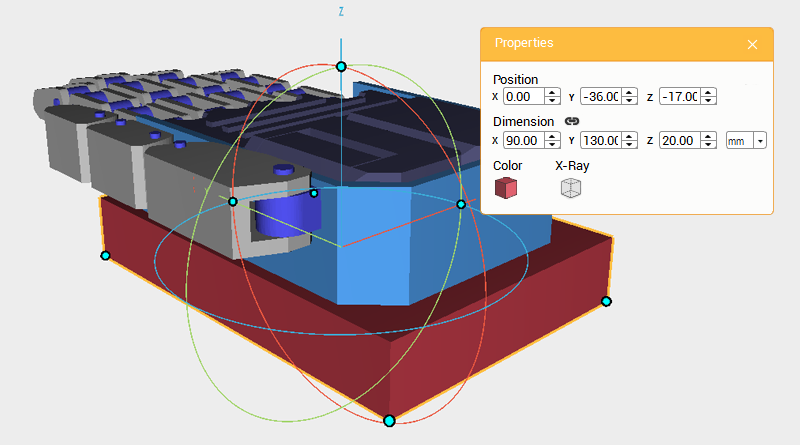 建立一個﹝Cube﹞物件,尺寸設定為X: 90,Y: 130,Z: 20 mm,位置設定為X: 0,Y: -36,Z: -17,作為「切削」物件。
建立一個﹝Cube﹞物件,尺寸設定為X: 90,Y: 130,Z: 20 mm,位置設定為X: 0,Y: -36,Z: -17,作為「切削」物件。 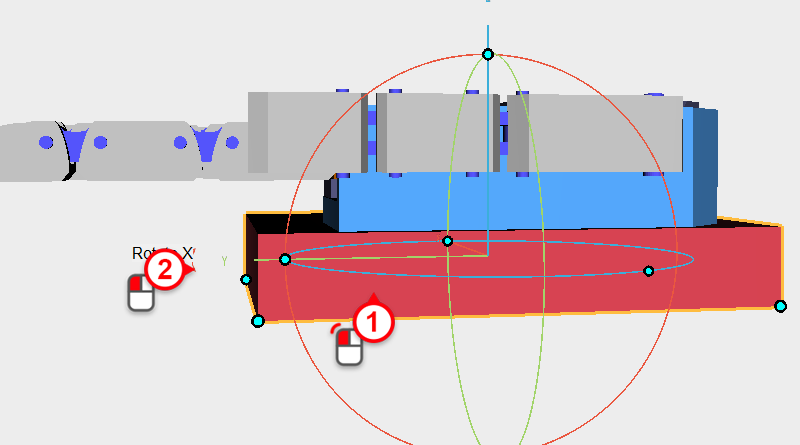
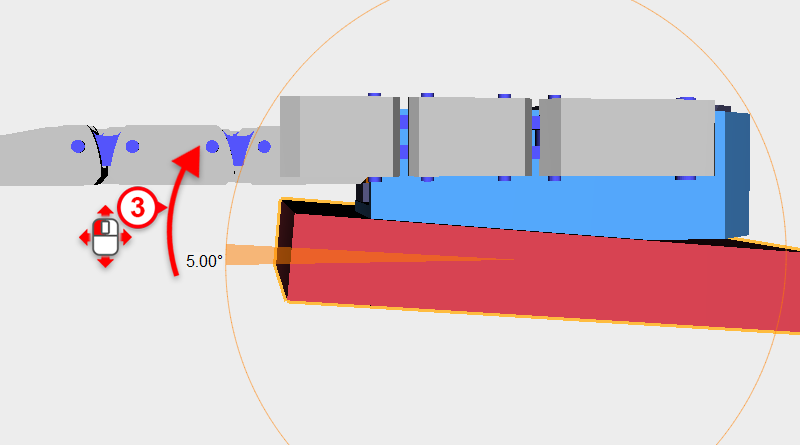 選取「切削」物件,按住控制器中Y字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為5度。
選取「切削」物件,按住控制器中Y字母旁的箭頭,拖曳滑鼠直到旋轉數值顯示為5度。 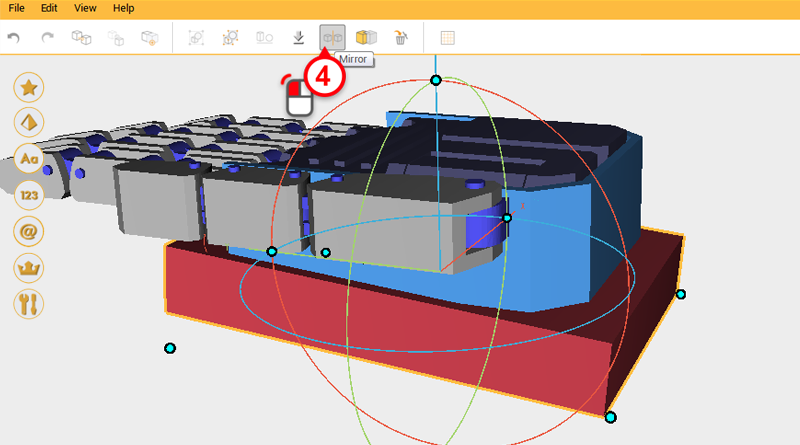
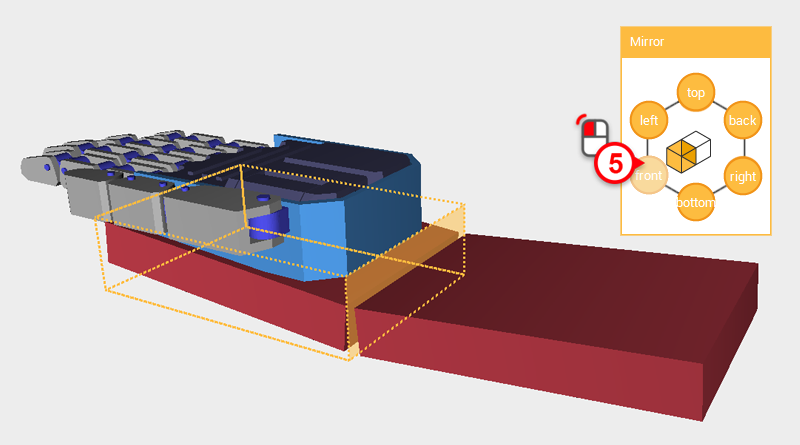 接著按下﹝Mirror﹞按鈕,在Mirror面板中按下﹝front﹞按鈕,鏡射出另一個「切削」物件。
接著按下﹝Mirror﹞按鈕,在Mirror面板中按下﹝front﹞按鈕,鏡射出另一個「切削」物件。 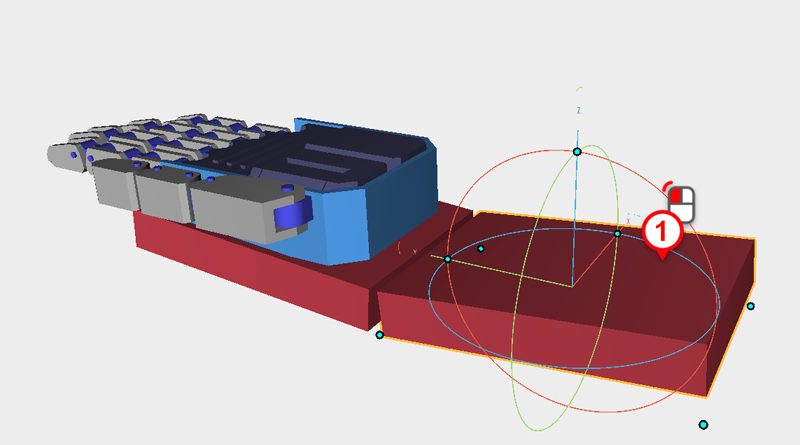
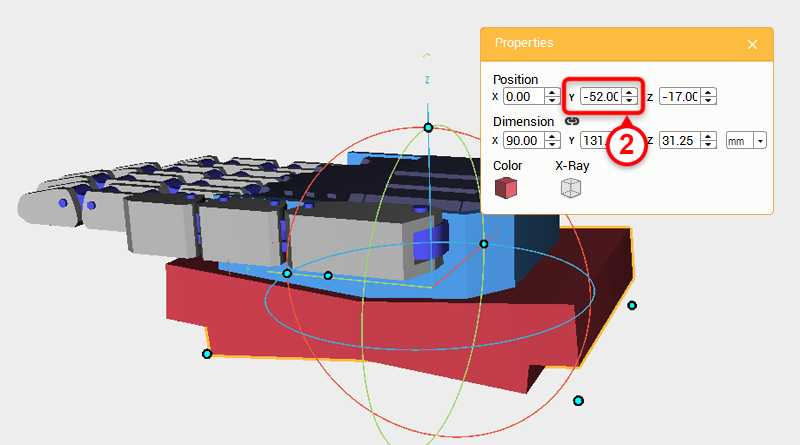 選取剛剛鏡射出來的「切削」物件,將位置的Y值設定為-52。
選取剛剛鏡射出來的「切削」物件,將位置的Y值設定為-52。 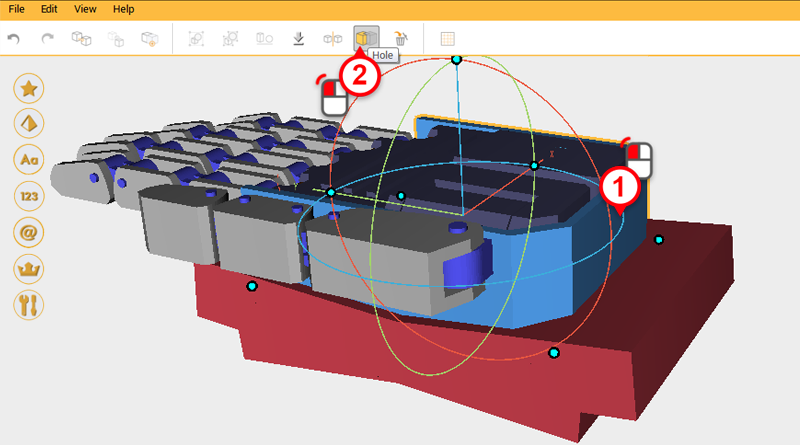
 利用這兩個「切削」物件,將「手背護甲」物件下方切削出斜面。
利用這兩個「切削」物件,將「手背護甲」物件下方切削出斜面。 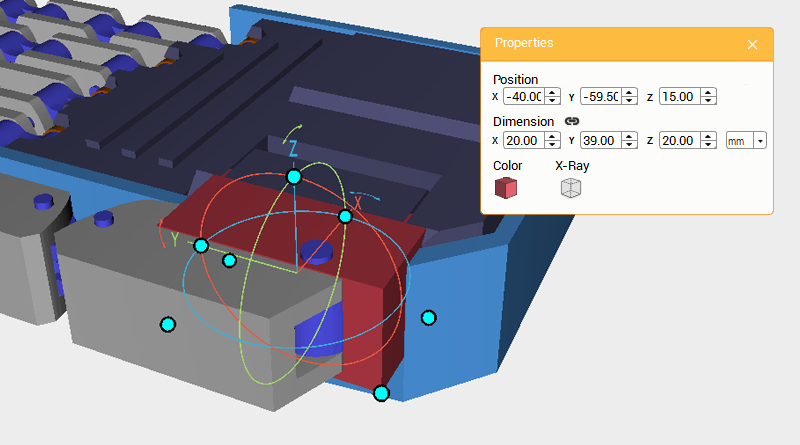 接著要對拇指與手掌連結的地方切削出空間,建立一個﹝Cube﹞物件,尺寸設定為X: 20,Y: 39,Z: 20 mm,位置設定為X: -40,Y: -59.5,Z: 15,作為「切削」物件。
接著要對拇指與手掌連結的地方切削出空間,建立一個﹝Cube﹞物件,尺寸設定為X: 20,Y: 39,Z: 20 mm,位置設定為X: -40,Y: -59.5,Z: 15,作為「切削」物件。 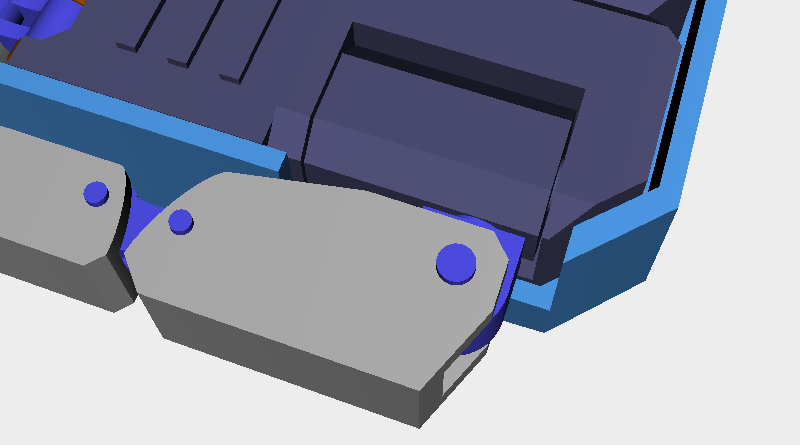 利用「切削」物件與﹝Hole﹞功能,將「手背護甲」物件切削出讓拇指連結的空間。
利用「切削」物件與﹝Hole﹞功能,將「手背護甲」物件切削出讓拇指連結的空間。 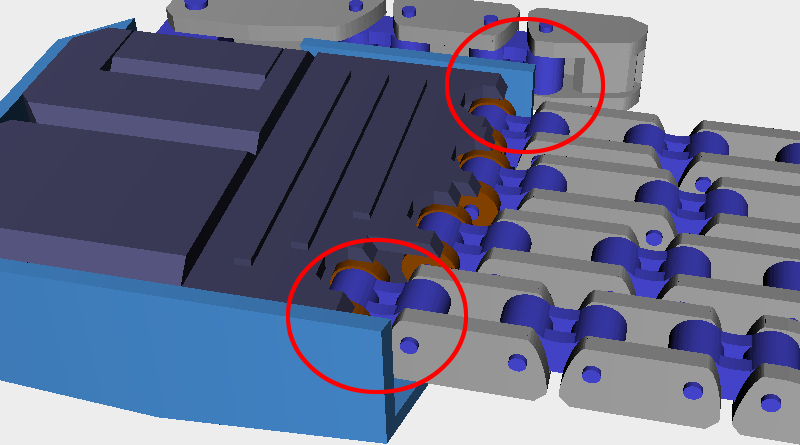
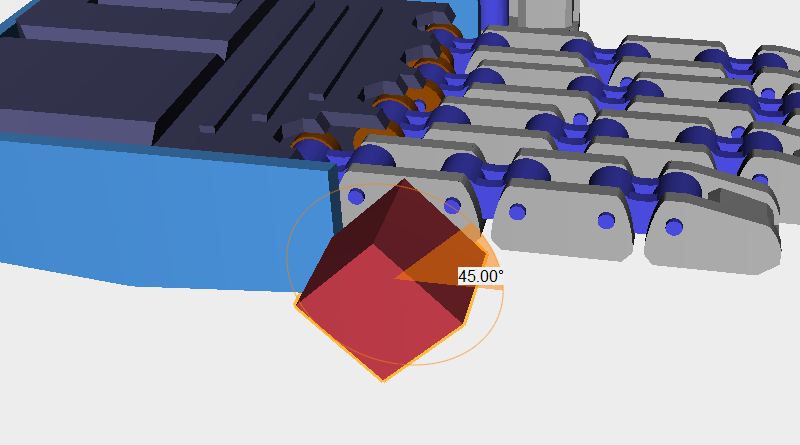
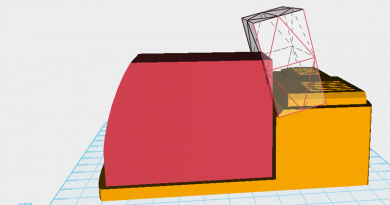
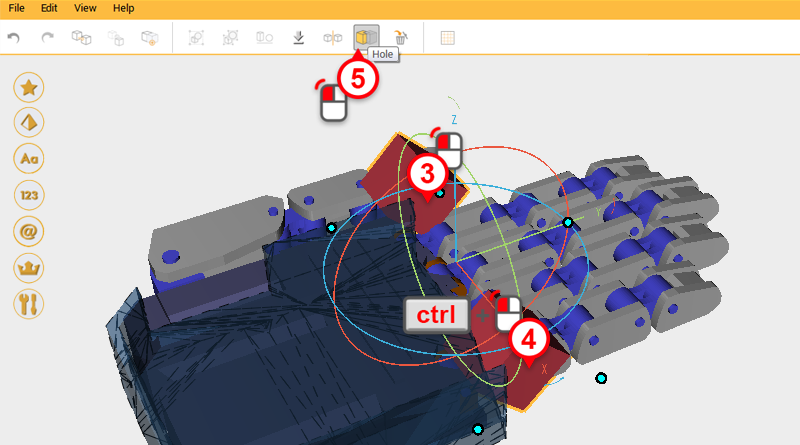
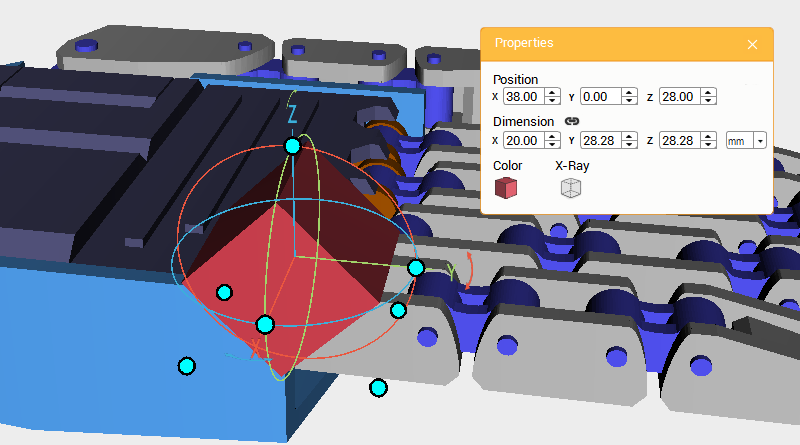 最後要對紅圈處的直角進行切削,建立一個﹝Cube﹞物件,移動到手指根部附近的位置,對X軸旋轉45度,接著將位置設定為X: 38,Y: 0,Z: 28,作為「切削」物件。
最後要對紅圈處的直角進行切削,建立一個﹝Cube﹞物件,移動到手指根部附近的位置,對X軸旋轉45度,接著將位置設定為X: 38,Y: 0,Z: 28,作為「切削」物件。 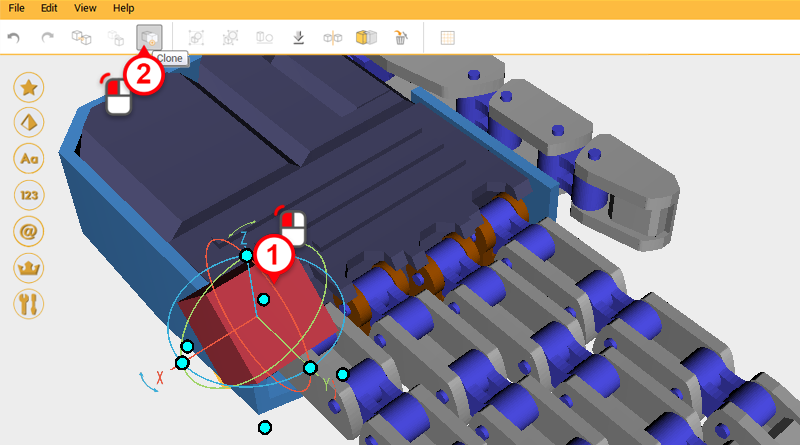
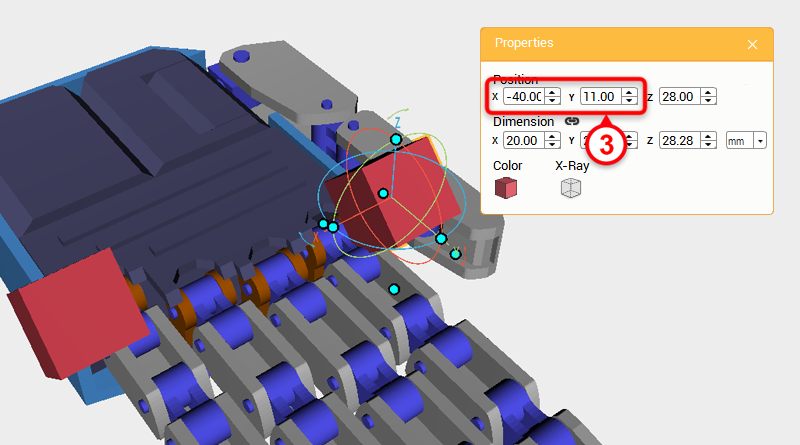 選取「切削」物件,按下﹝Clone﹞按鈕,接著將位置的X值設定為-40,Y值設定為11。
選取「切削」物件,按下﹝Clone﹞按鈕,接著將位置的X值設定為-40,Y值設定為11。 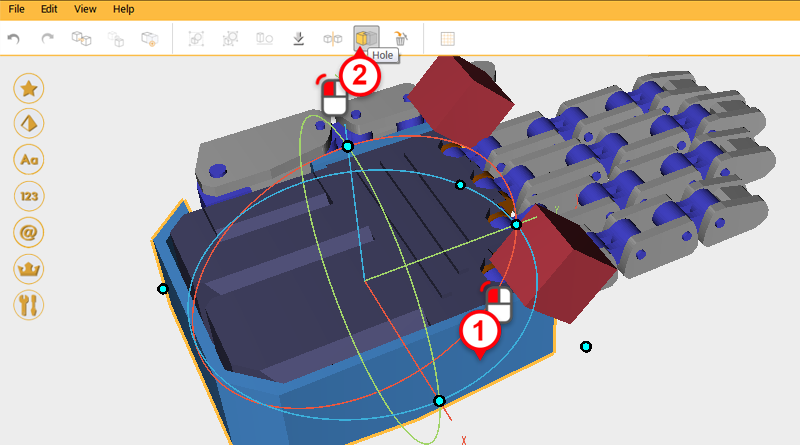
 利用這兩個「切削」物件,將「手背護甲」物件切削出斜角。
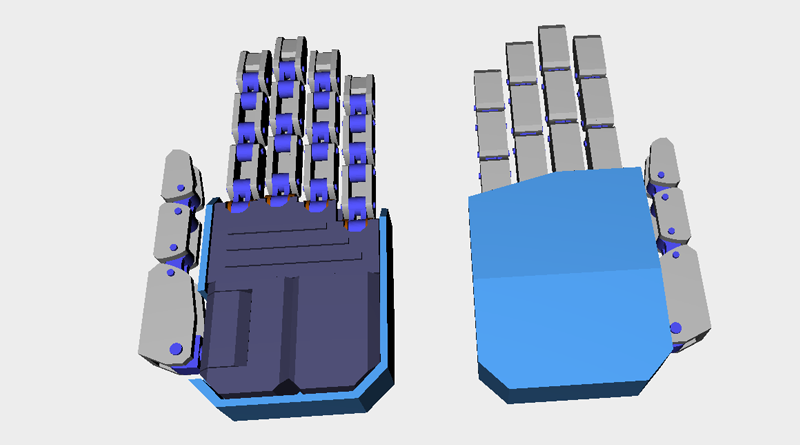
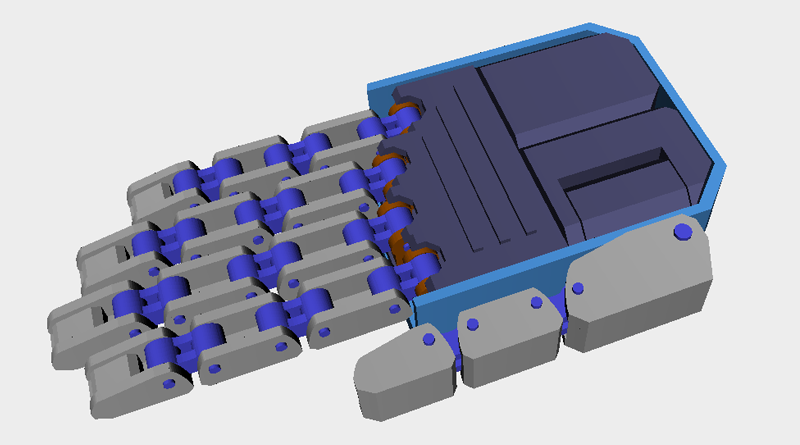
利用這兩個「切削」物件,將「手背護甲」物件切削出斜角。 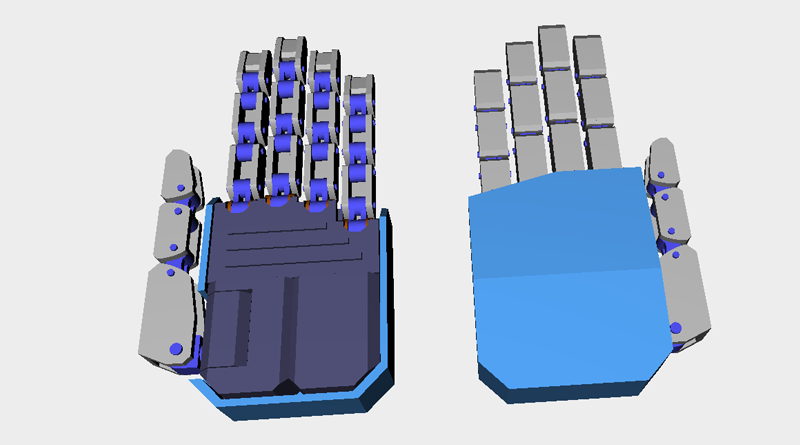 機械手掌模型已製作完成,可以準備進行後續的列印工作囉!
機械手掌模型已製作完成,可以準備進行後續的列印工作囉!