XYZmaker建模教學 – 機械手PART5
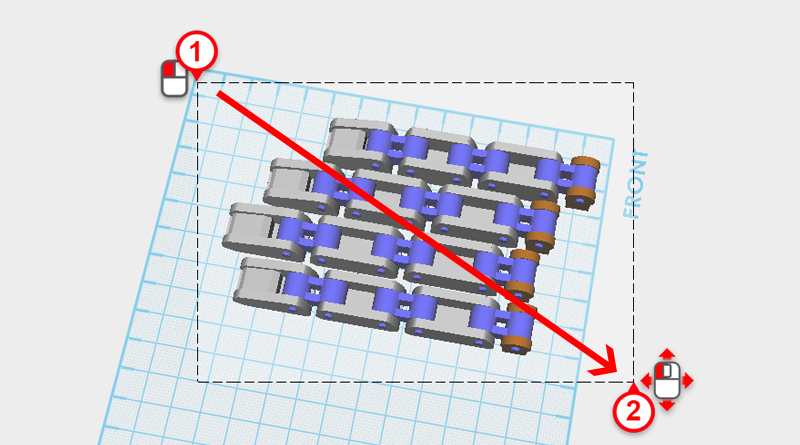
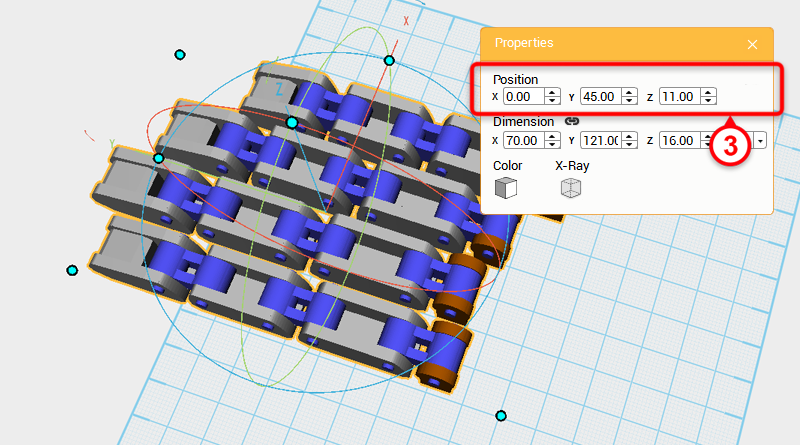 接下來要開始製作手掌部分,框選所有手指模型,將位置設定為:X: 0,Y: 45,Z: 11。
接下來要開始製作手掌部分,框選所有手指模型,將位置設定為:X: 0,Y: 45,Z: 11。 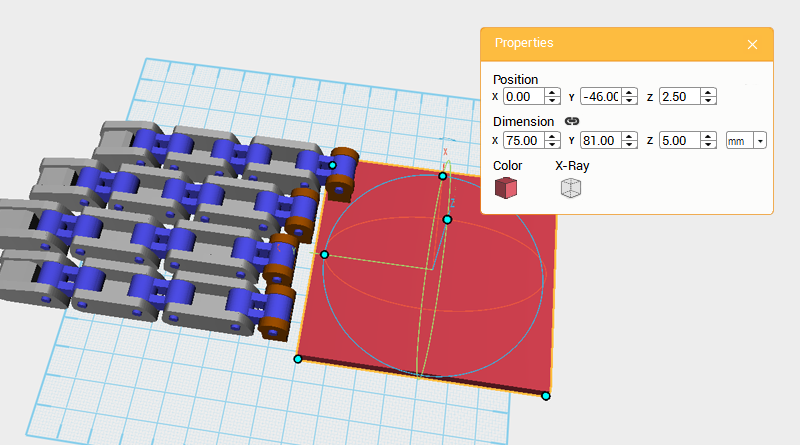 建立一個﹝Cube﹞物件,接著將尺寸設定為X: 75,Y: 81,Z: 5 mm,位置設定為X: 0,Y: -46,Z: 2.5。
建立一個﹝Cube﹞物件,接著將尺寸設定為X: 75,Y: 81,Z: 5 mm,位置設定為X: 0,Y: -46,Z: 2.5。 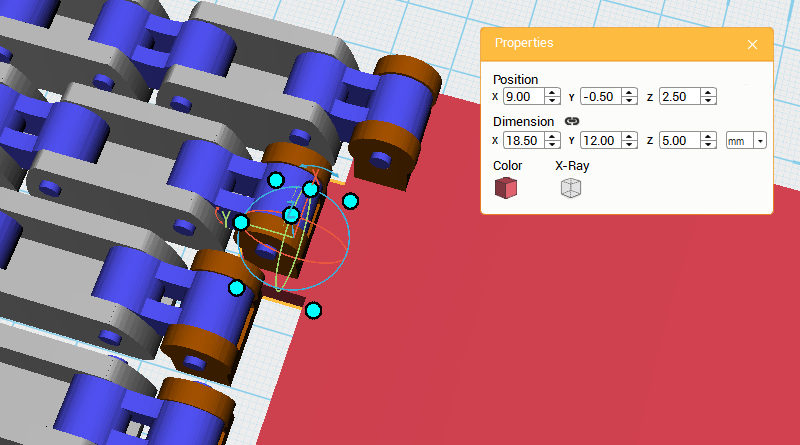 建立一個﹝Cube﹞物件,接著將尺寸設定為X: 18.5,Y: 12,Z: 5 mm,位置設定為X: 9,Y: -0.5,Z: 2.5,延伸出的面積讓無名指能與手掌組合。
建立一個﹝Cube﹞物件,接著將尺寸設定為X: 18.5,Y: 12,Z: 5 mm,位置設定為X: 9,Y: -0.5,Z: 2.5,延伸出的面積讓無名指能與手掌組合。 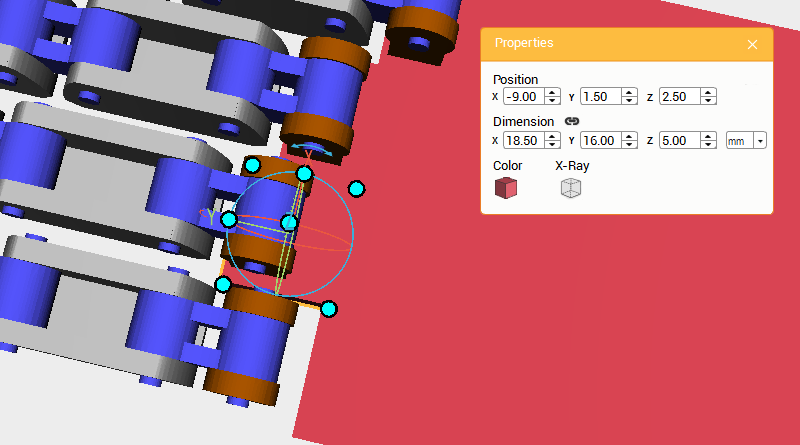 建立一個﹝Cube﹞物件,接著將尺寸設定為X: 18.5,Y: 16,Z: 5 mm,位置設定為X: -9,Y: 1.5,Z: 2.5,延伸出的面積讓中指能與手掌組合。
建立一個﹝Cube﹞物件,接著將尺寸設定為X: 18.5,Y: 16,Z: 5 mm,位置設定為X: -9,Y: 1.5,Z: 2.5,延伸出的面積讓中指能與手掌組合。 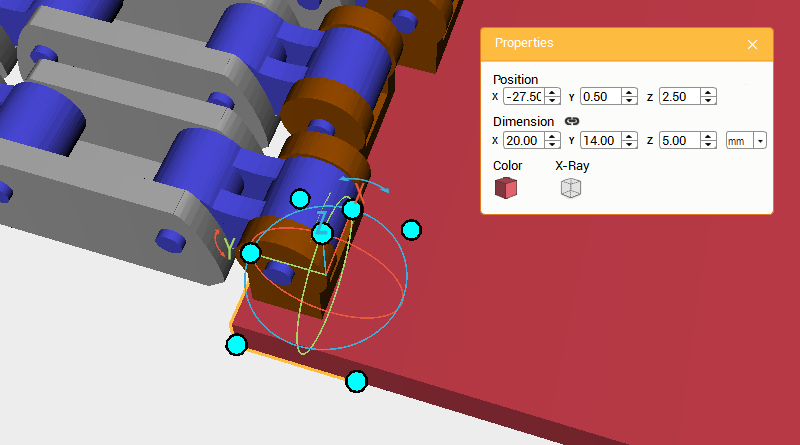 建立一個﹝Cube﹞物件,接著將尺寸設定為X: 20,Y: 14,Z: 5 mm,位置設定為X: -27.5,Y: 0.5,Z: 2.5,延伸出的面積讓食指能與手掌組合。
建立一個﹝Cube﹞物件,接著將尺寸設定為X: 20,Y: 14,Z: 5 mm,位置設定為X: -27.5,Y: 0.5,Z: 2.5,延伸出的面積讓食指能與手掌組合。 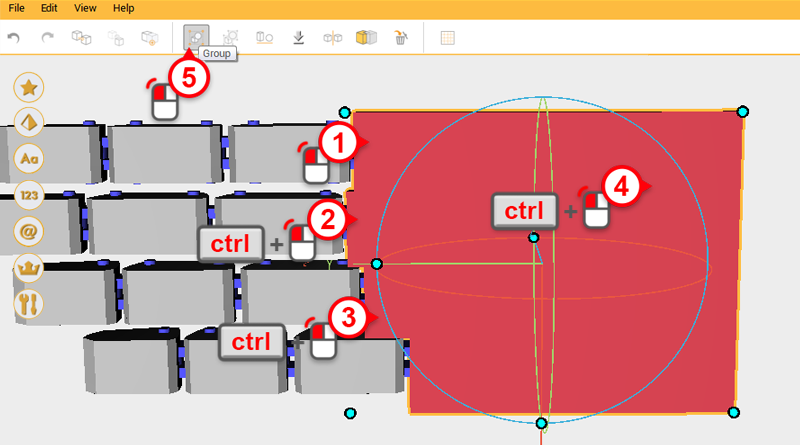 將視點轉至下方,如圖所示選取物件,按下﹝Group﹞按鈕,完成「手掌底板」物件。
將視點轉至下方,如圖所示選取物件,按下﹝Group﹞按鈕,完成「手掌底板」物件。 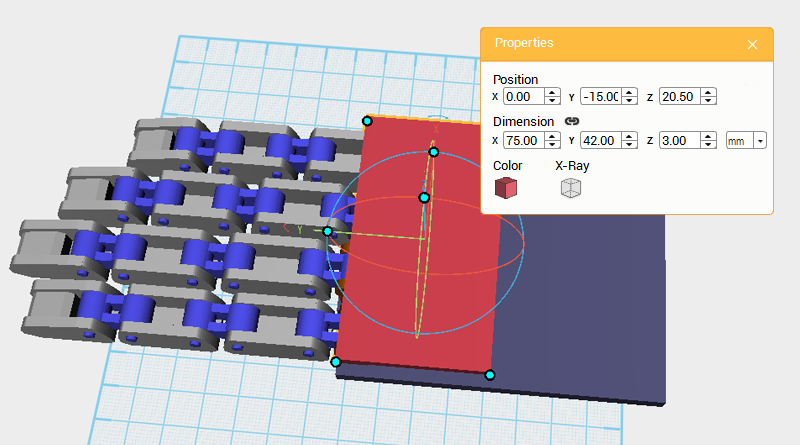 建立一個﹝Cube﹞物件,接著將尺寸設定為X: 75,Y: 42,Z: 3 mm,位置設定為X: 0,Y: -15,Z: 20.5,作為「手掌蓋板」物件。
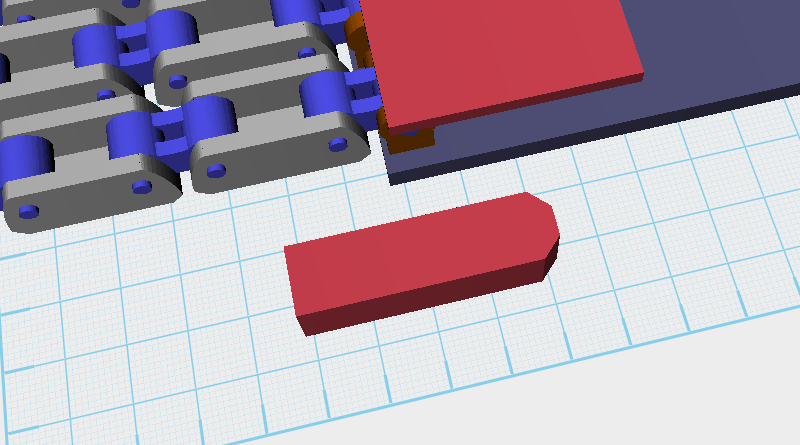
建立一個﹝Cube﹞物件,接著將尺寸設定為X: 75,Y: 42,Z: 3 mm,位置設定為X: 0,Y: -15,Z: 20.5,作為「手掌蓋板」物件。 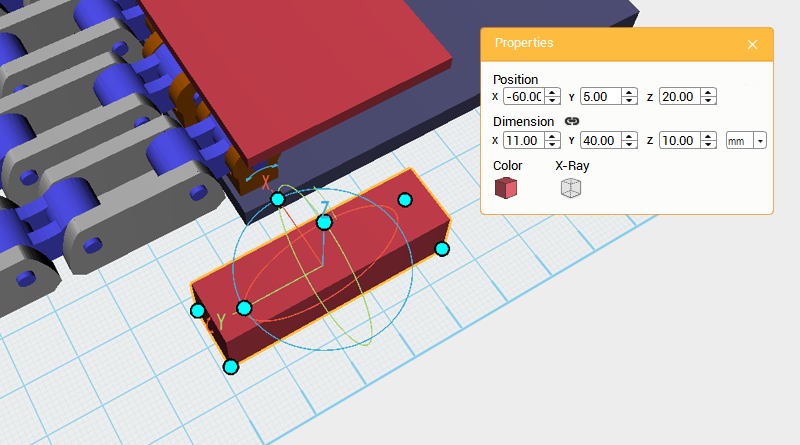 接著我們要先製作一個帶有斜角的切削物件,再對「手掌蓋板」物件切削出讓關節活動的溝槽。建立一個﹝Cube﹞物件,將尺寸設定為X: 11,Y: 40,Z: 10 mm,位置設定為X: -60,Y: 5,Z: 20。
接著我們要先製作一個帶有斜角的切削物件,再對「手掌蓋板」物件切削出讓關節活動的溝槽。建立一個﹝Cube﹞物件,將尺寸設定為X: 11,Y: 40,Z: 10 mm,位置設定為X: -60,Y: 5,Z: 20。 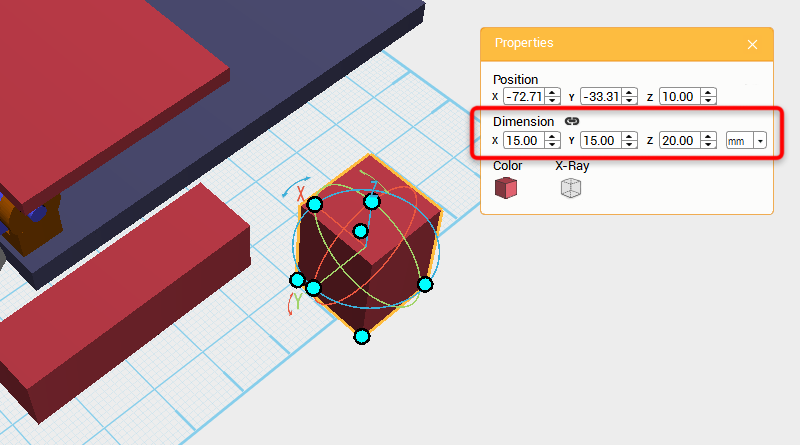
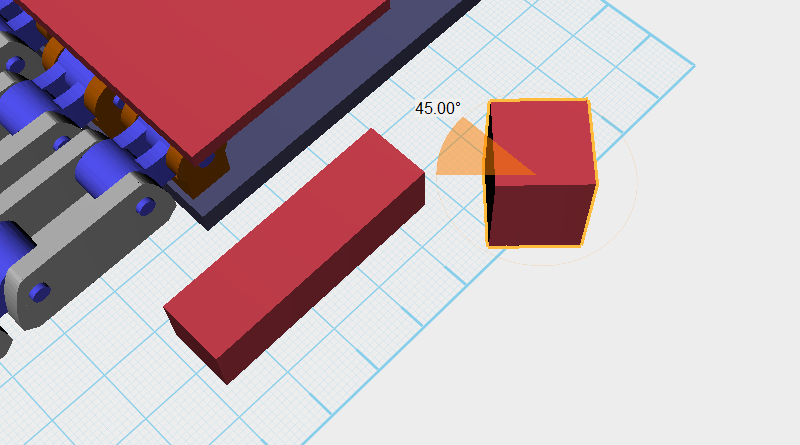
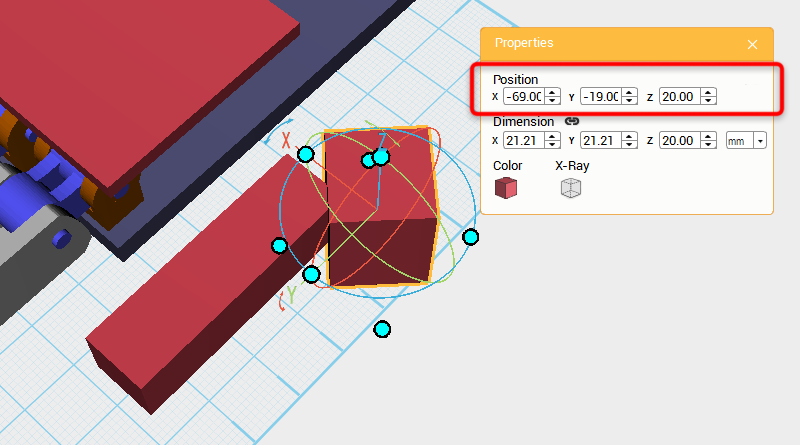 建立一個﹝Cube﹞物件,將尺寸設定為X: 15,Y: 15,Z: 20 mm,接著對Z軸旋轉45度,再將位置設定為X: -69,Y: -19,Z: 20。
建立一個﹝Cube﹞物件,將尺寸設定為X: 15,Y: 15,Z: 20 mm,接著對Z軸旋轉45度,再將位置設定為X: -69,Y: -19,Z: 20。 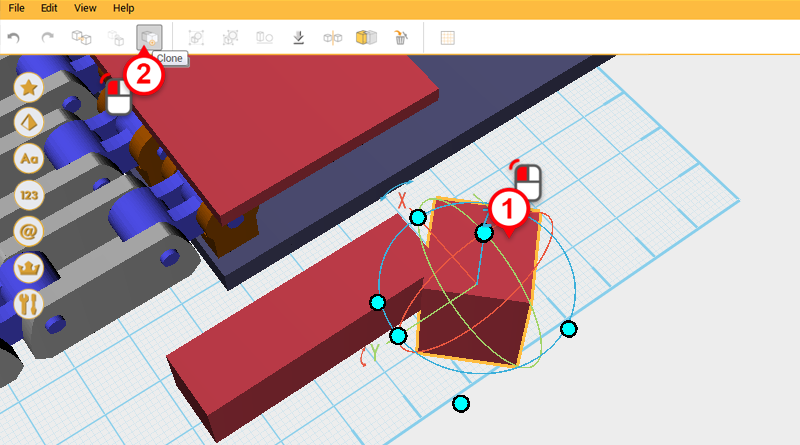
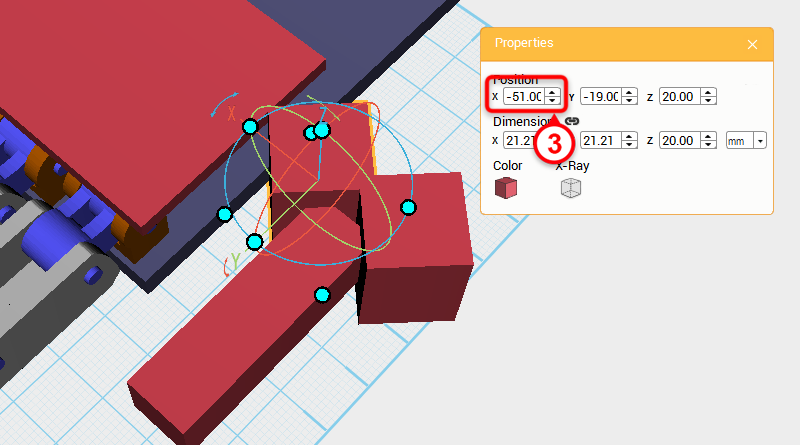 選取剛剛建立的﹝Cube﹞物件,按下﹝Clone﹞按鈕,接著將位置的X值設定為-51。
選取剛剛建立的﹝Cube﹞物件,按下﹝Clone﹞按鈕,接著將位置的X值設定為-51。 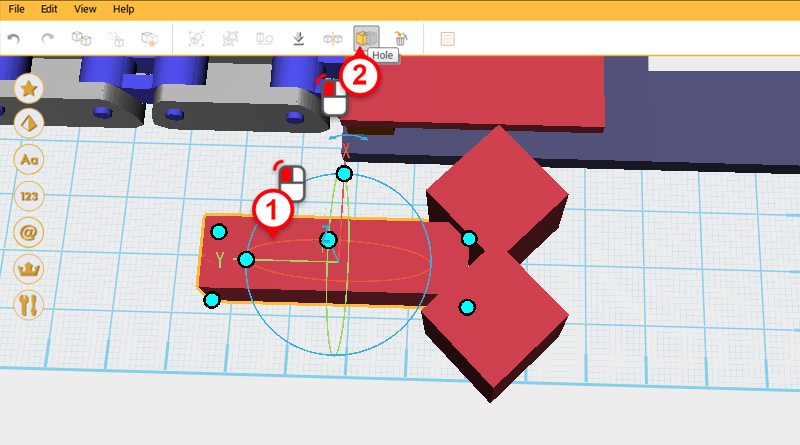
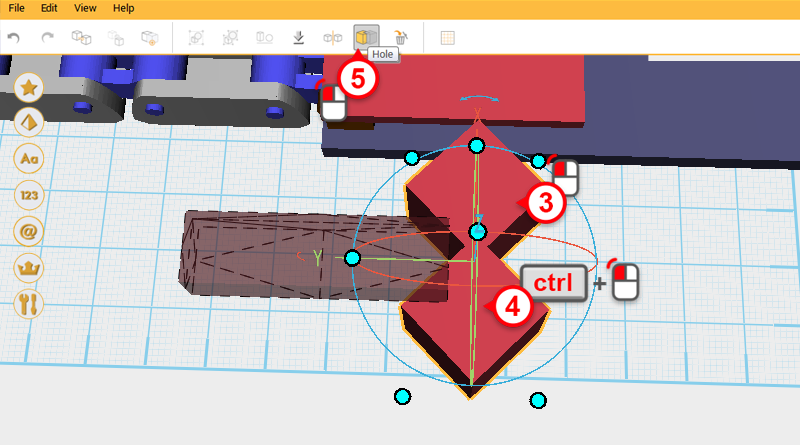
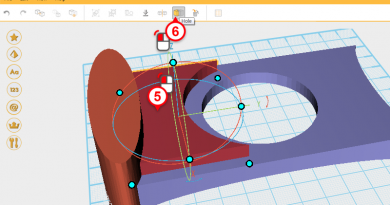
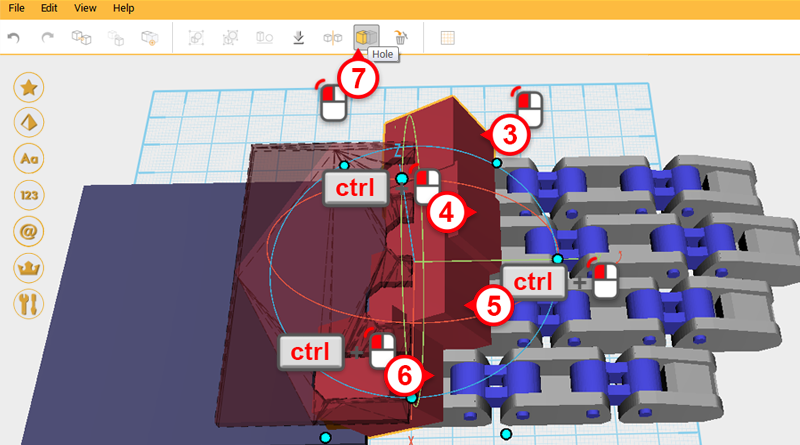
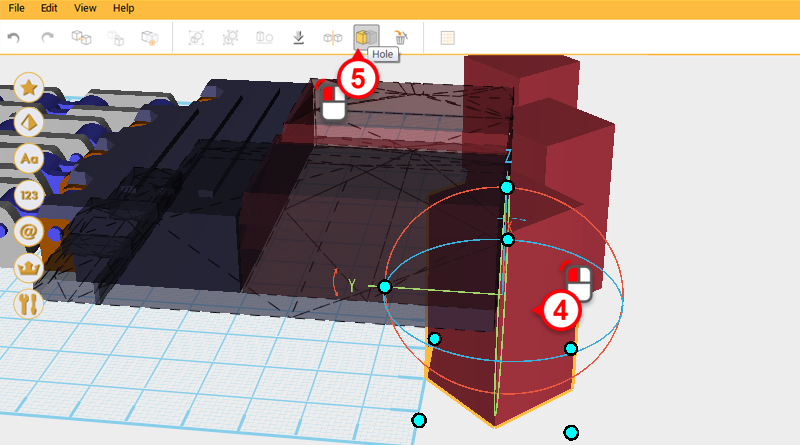
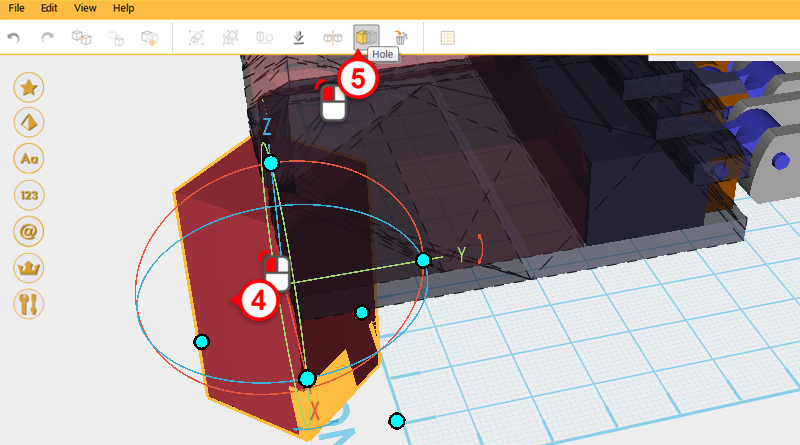
 接著如圖所示利用﹝Hole﹞功能製作完成具有斜邊的「切削」物件。
接著如圖所示利用﹝Hole﹞功能製作完成具有斜邊的「切削」物件。 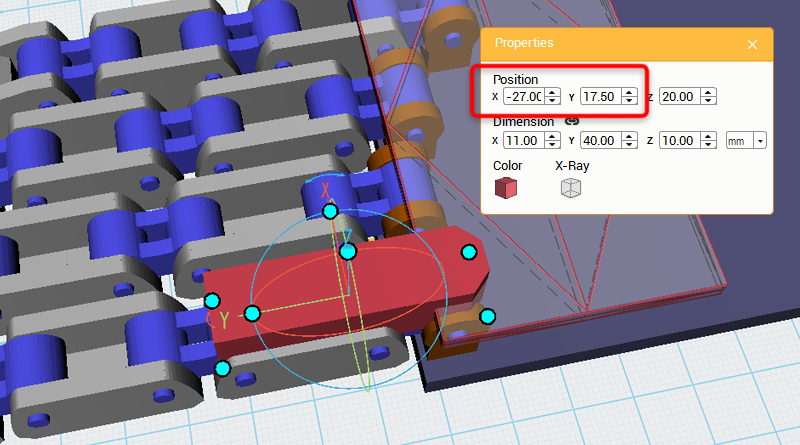 選取「切削」物件,將位置的X值設定為-27,Y值設定為17.5。
選取「切削」物件,將位置的X值設定為-27,Y值設定為17.5。 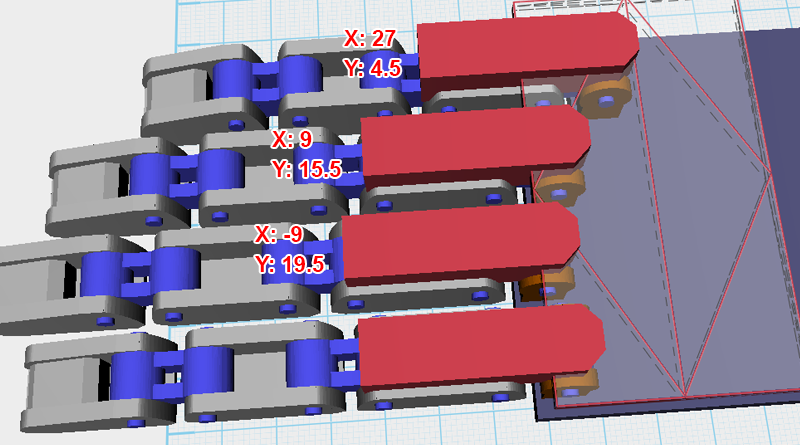 拷貝出另外三個「切削」物件,並如圖所示設定位置的X值與Y值。
拷貝出另外三個「切削」物件,並如圖所示設定位置的X值與Y值。 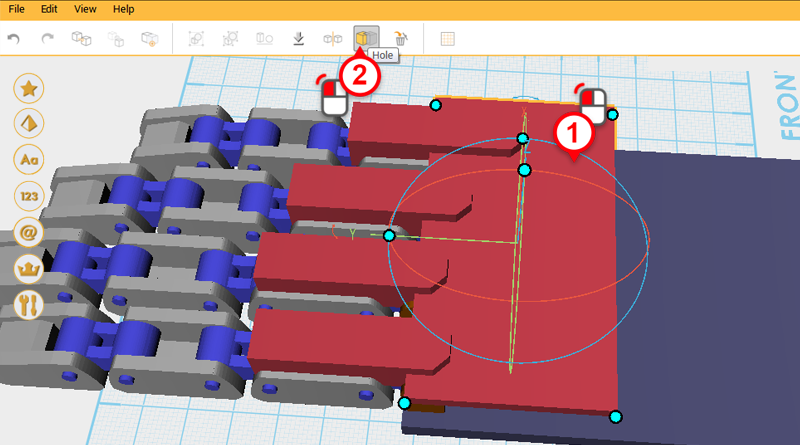
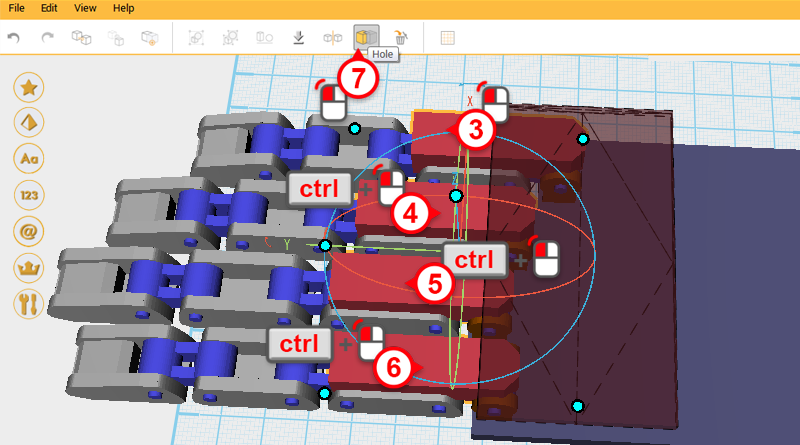
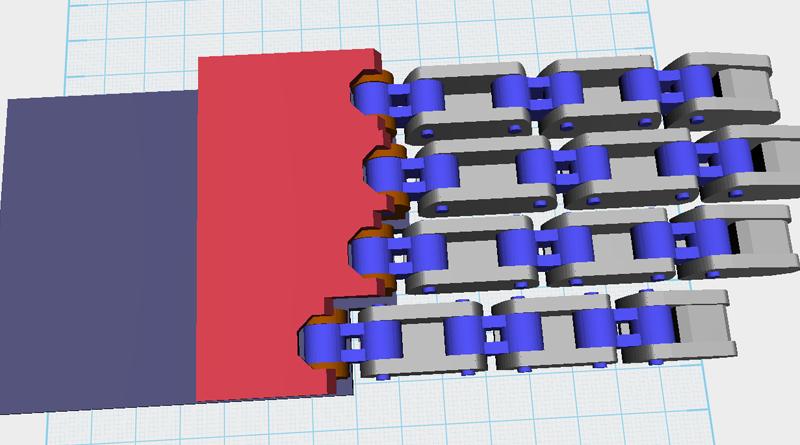
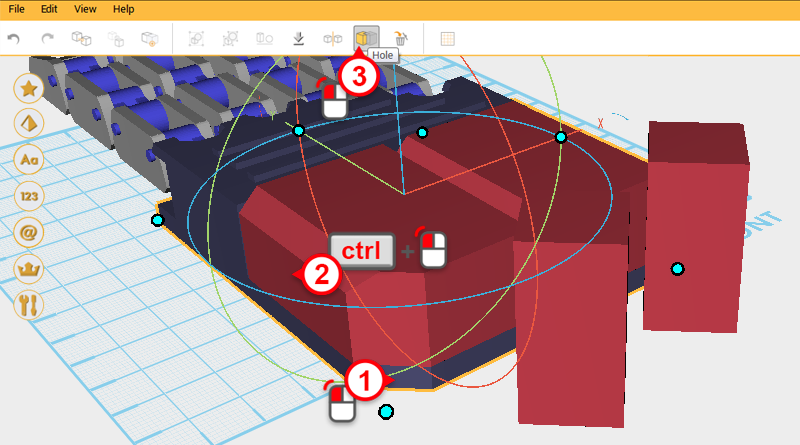
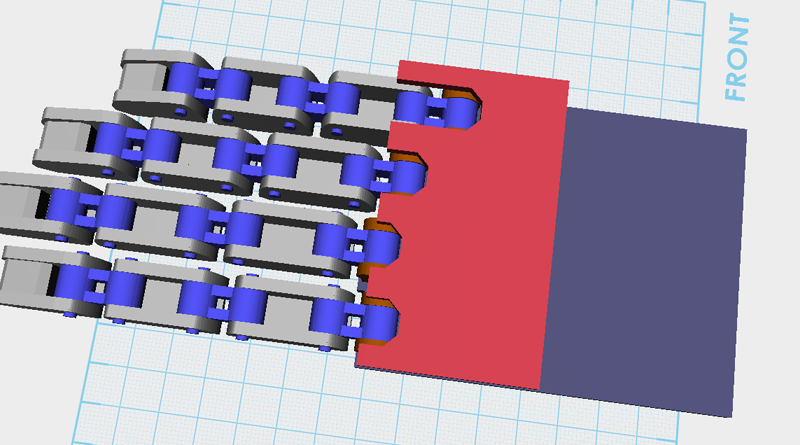 利用這四個「切削」物件與﹝Hole﹞功能,將「手掌蓋板」物件切削出溝槽。
利用這四個「切削」物件與﹝Hole﹞功能,將「手掌蓋板」物件切削出溝槽。 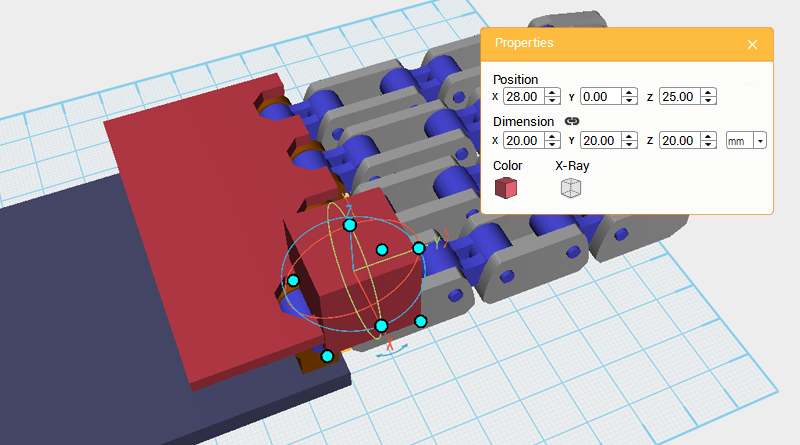
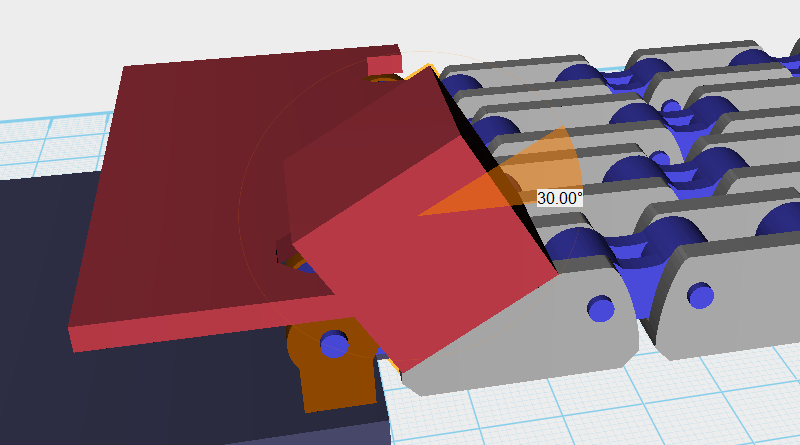 建立一個﹝Cube﹞物件,將位置設定為X: 28,Y: 0,Z: 25,接著對X軸旋轉30度,作為「切削」物件。
建立一個﹝Cube﹞物件,將位置設定為X: 28,Y: 0,Z: 25,接著對X軸旋轉30度,作為「切削」物件。 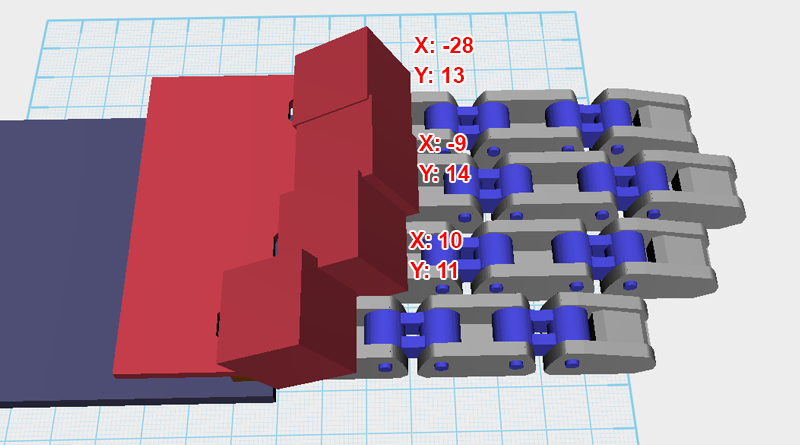 同樣拷貝出另外三個「切削」物件,並如圖所示設定位置的X值與Y值。
同樣拷貝出另外三個「切削」物件,並如圖所示設定位置的X值與Y值。 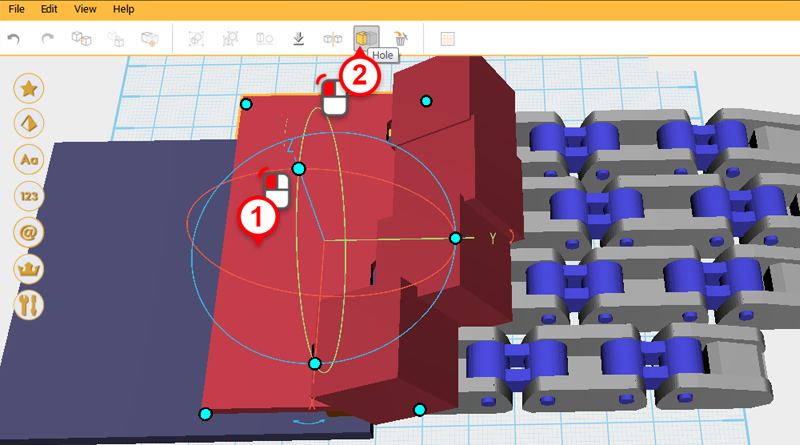
 利用這四個「切削」物件與﹝Hole﹞功能,繼續對「手掌蓋板」物件進行切削。
利用這四個「切削」物件與﹝Hole﹞功能,繼續對「手掌蓋板」物件進行切削。 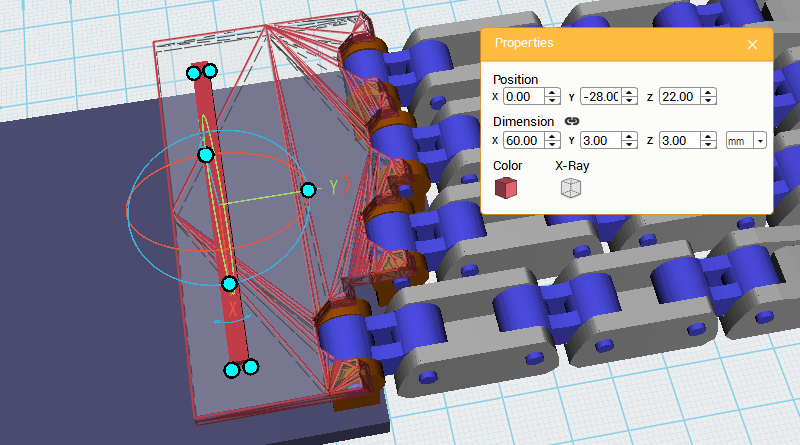 建立一個﹝Cube﹞物件,將尺寸設定為X: 60,Y: 3,Z: 3 mm,位置設定為X: 0,Y: -28,Z: 22。
建立一個﹝Cube﹞物件,將尺寸設定為X: 60,Y: 3,Z: 3 mm,位置設定為X: 0,Y: -28,Z: 22。 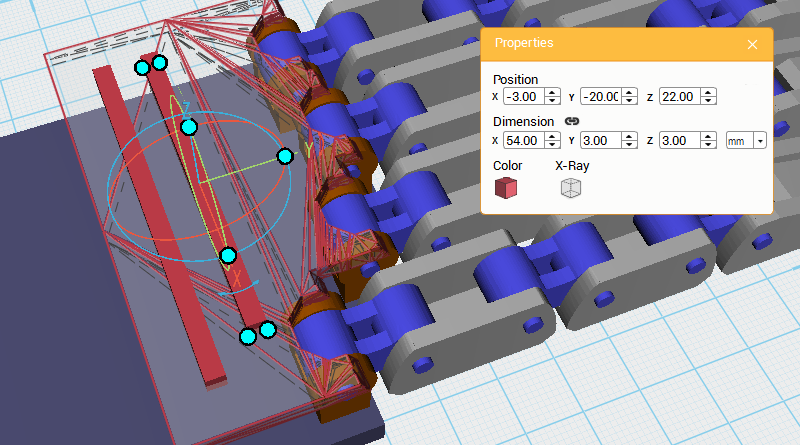 拷貝此﹝Cube﹞物件,將尺寸的X值設定為54mm,位置的X值設定為-3,Y值設定為-20。
拷貝此﹝Cube﹞物件,將尺寸的X值設定為54mm,位置的X值設定為-3,Y值設定為-20。 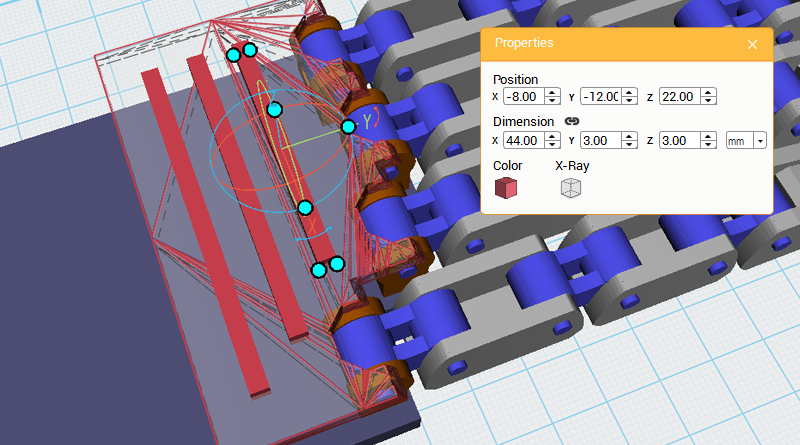 再次拷貝﹝Cube﹞物件,將尺寸的X值設定為44mm,位置的X值設定為-8,Y值設定為-12。
再次拷貝﹝Cube﹞物件,將尺寸的X值設定為44mm,位置的X值設定為-8,Y值設定為-12。 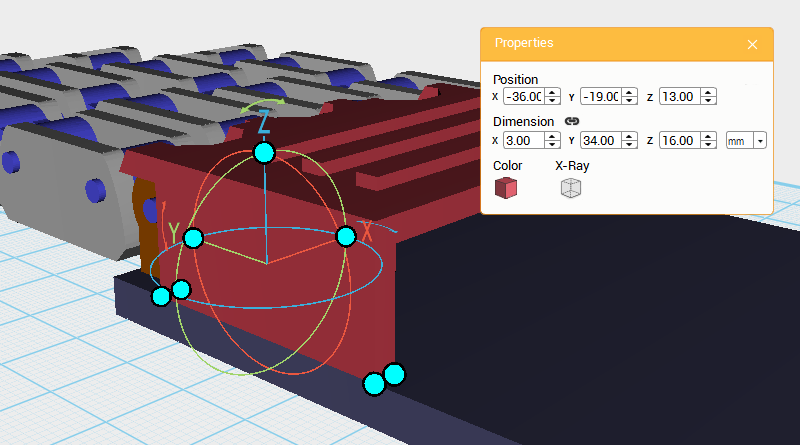 接下來要製作「手掌蓋板」物件側面的結構,建立一個﹝Cube﹞物件,將尺寸設定為X: 3,Y: 34,Z: 16 mm,位置設定為X: -36,Y: -19,Z: 13。
接下來要製作「手掌蓋板」物件側面的結構,建立一個﹝Cube﹞物件,將尺寸設定為X: 3,Y: 34,Z: 16 mm,位置設定為X: -36,Y: -19,Z: 13。 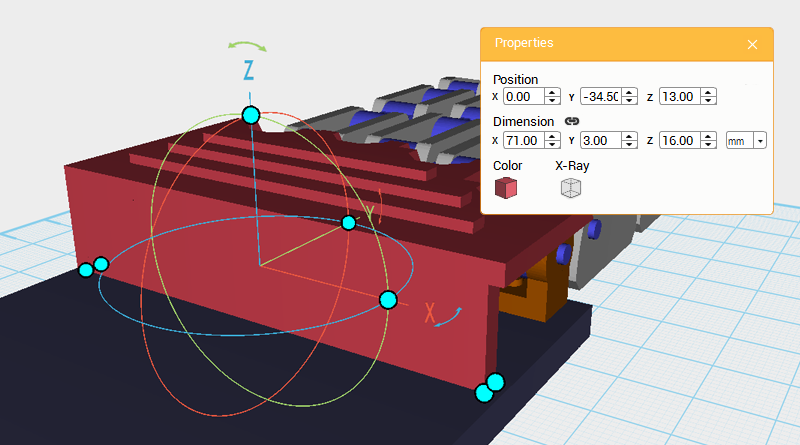 建立一個﹝Cube﹞物件,將尺寸設定為X: 71,Y: 3,Z: 16 mm,位置設定為X: 0,Y: -34.5,Z: 13。
建立一個﹝Cube﹞物件,將尺寸設定為X: 71,Y: 3,Z: 16 mm,位置設定為X: 0,Y: -34.5,Z: 13。 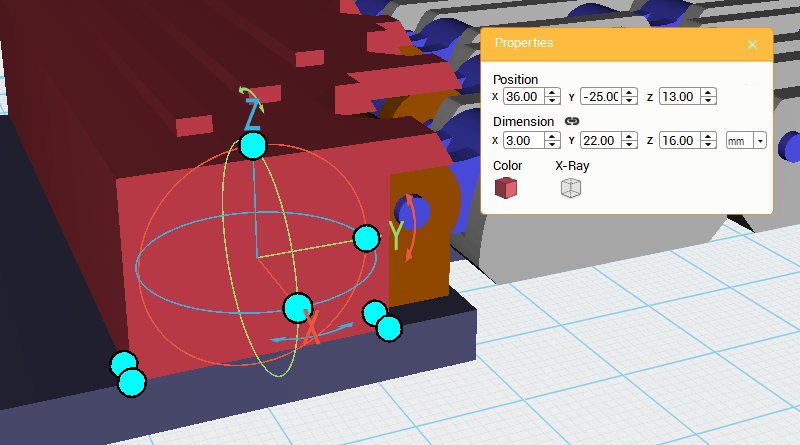 建立一個﹝Cube﹞物件,將尺寸設定為X: 3,Y: 22,Z: 16 mm,位置設定為X: 36,Y: -25,Z: 13。
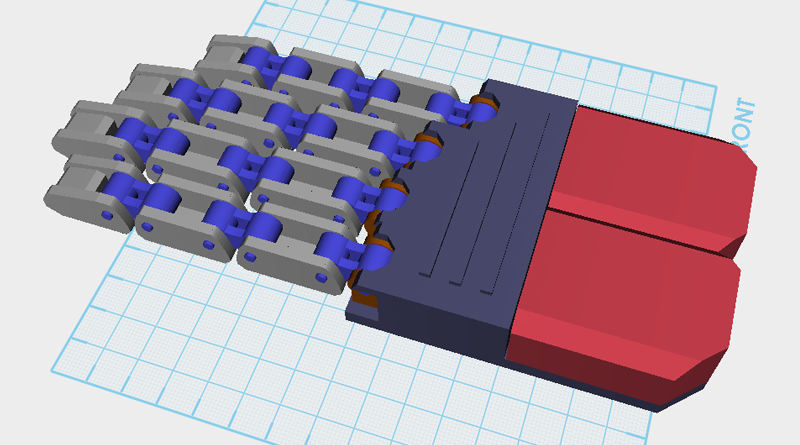
建立一個﹝Cube﹞物件,將尺寸設定為X: 3,Y: 22,Z: 16 mm,位置設定為X: 36,Y: -25,Z: 13。 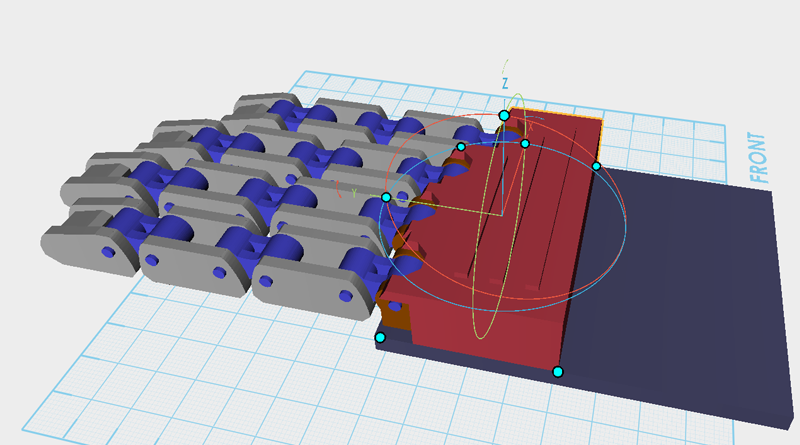 最後選取圖中所有紅色的﹝Cube﹞物件,按下﹝Group﹞按鈕,完成「手掌蓋板」物件。
最後選取圖中所有紅色的﹝Cube﹞物件,按下﹝Group﹞按鈕,完成「手掌蓋板」物件。 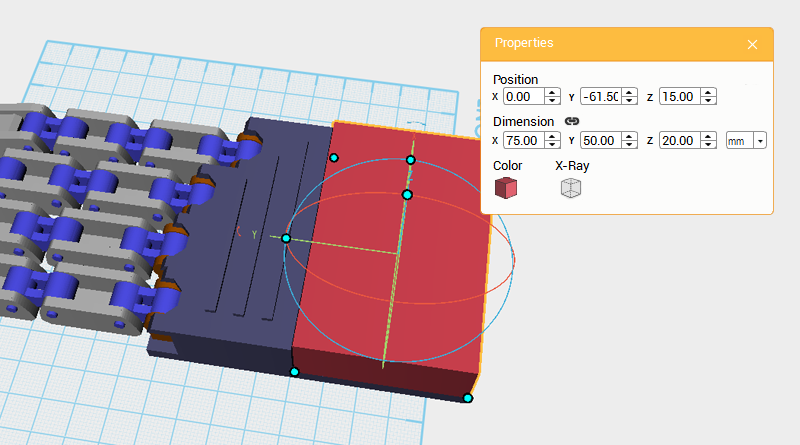 接下來要製作手掌的其餘部分。建立一個﹝Cube﹞物件,將尺寸設定為X: 75,Y: 50,Z: 20 mm,位置設定為X: 0,Y: -61.5,Z: 15,作為「掌心」物件。
接下來要製作手掌的其餘部分。建立一個﹝Cube﹞物件,將尺寸設定為X: 75,Y: 50,Z: 20 mm,位置設定為X: 0,Y: -61.5,Z: 15,作為「掌心」物件。 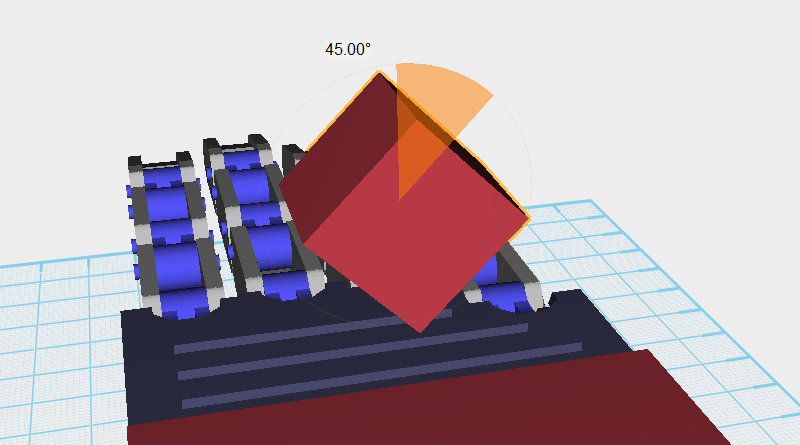
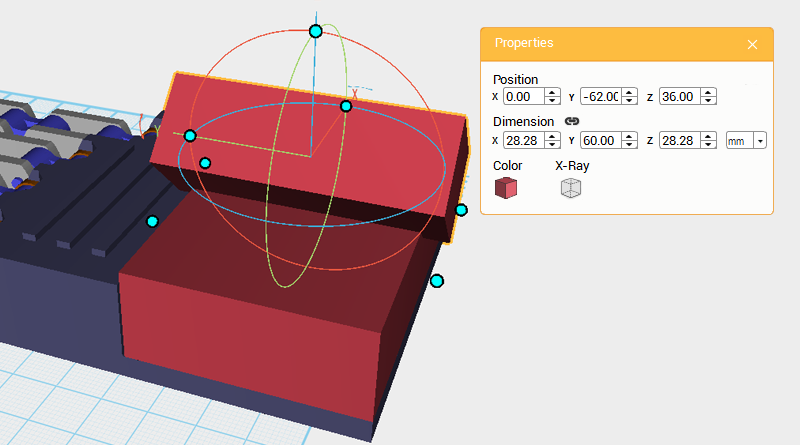 建立一個﹝Cube﹞物件,對Y軸旋轉45度後,將尺寸的Y值設定為60mm,位置設定為X: 0,Y: -62,Z: 36,作為「切削」物件。
建立一個﹝Cube﹞物件,對Y軸旋轉45度後,將尺寸的Y值設定為60mm,位置設定為X: 0,Y: -62,Z: 36,作為「切削」物件。 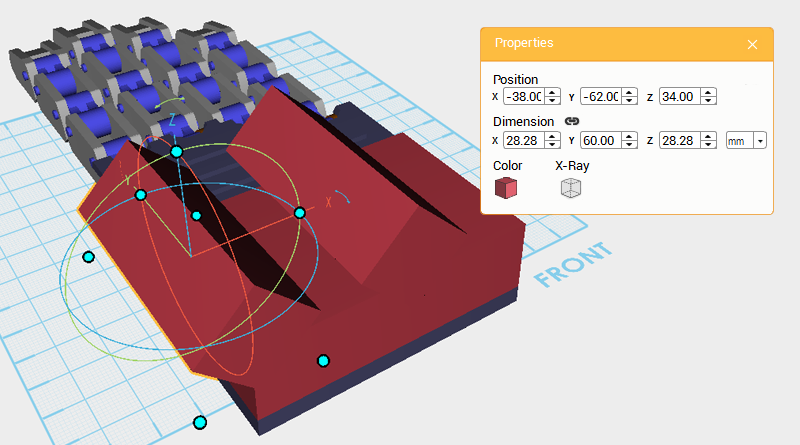 拷貝「切削」物件,將位置的X值設定為-38,Z值設定為34。
拷貝「切削」物件,將位置的X值設定為-38,Z值設定為34。 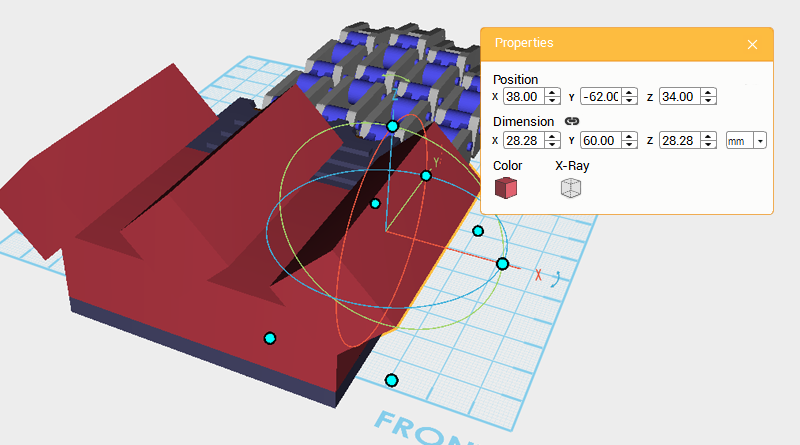 再次拷貝「切削」物件,將位置的X值設定為38,Z值設定為34。
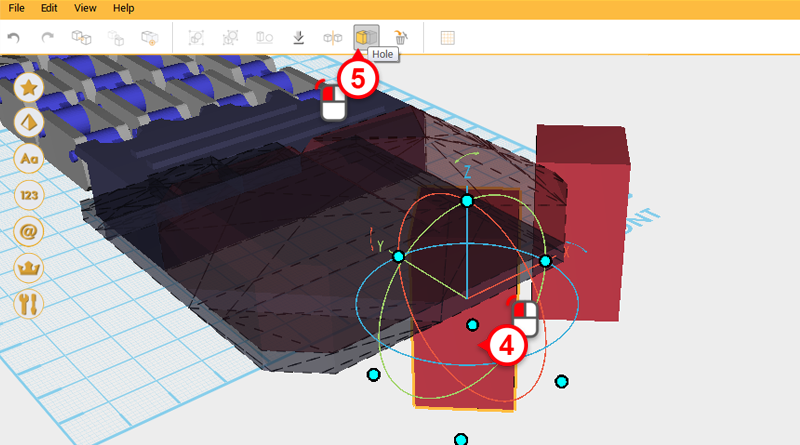
再次拷貝「切削」物件,將位置的X值設定為38,Z值設定為34。 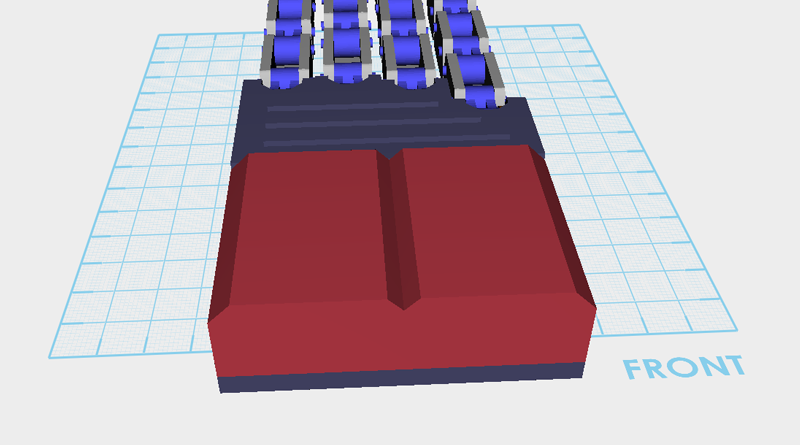 接著利用這三個「切削」物件與﹝Hole﹞功能,將「掌心」物件切削為如圖所示的樣子。
接著利用這三個「切削」物件與﹝Hole﹞功能,將「掌心」物件切削為如圖所示的樣子。 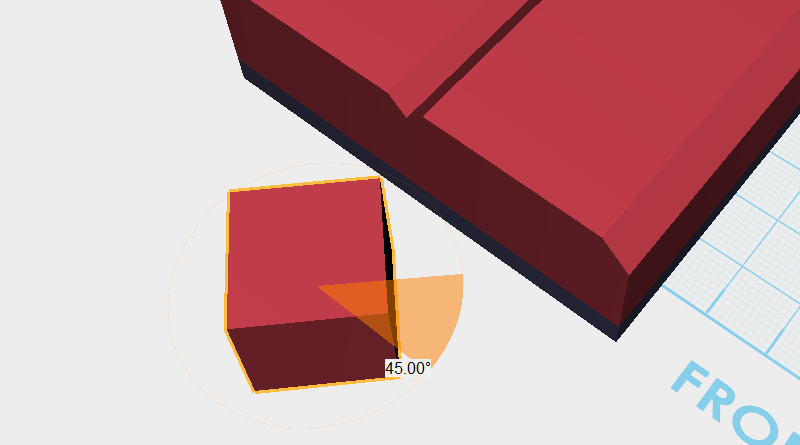
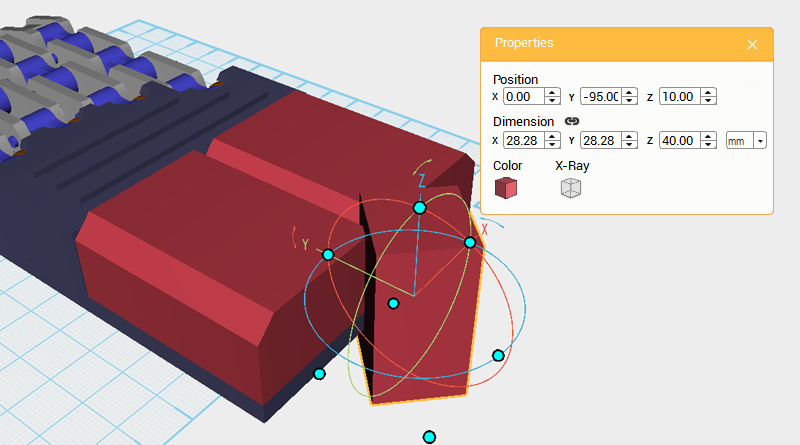 建立一個﹝Cube﹞物件,對Z軸旋轉45度後,將尺寸的Z值設定為40mm,位置設定為X: 0,Y: -95,Z: 10,作為「切削」物件。
建立一個﹝Cube﹞物件,對Z軸旋轉45度後,將尺寸的Z值設定為40mm,位置設定為X: 0,Y: -95,Z: 10,作為「切削」物件。 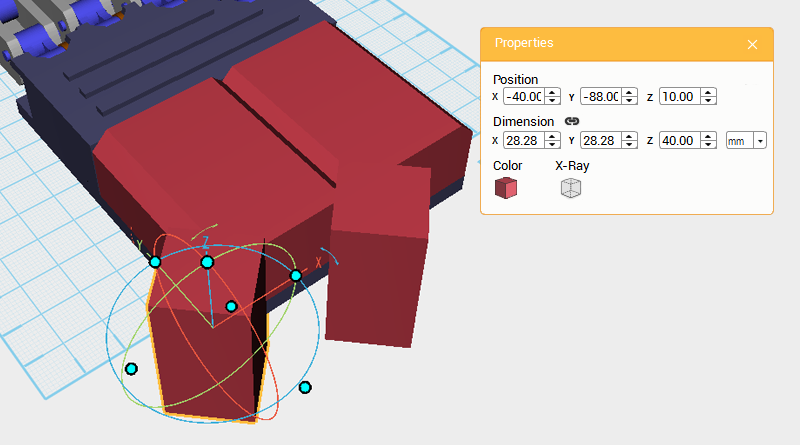 拷貝「切削」物件,將位置的X值設定為-40,Y值設定為-88。
拷貝「切削」物件,將位置的X值設定為-40,Y值設定為-88。 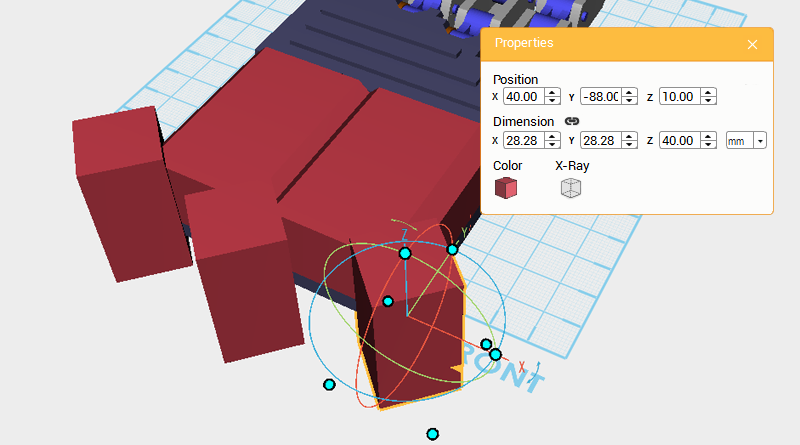 再次拷貝「切削」物件,將位置的X值設定為40,Y值設定為-88。
再次拷貝「切削」物件,將位置的X值設定為40,Y值設定為-88。 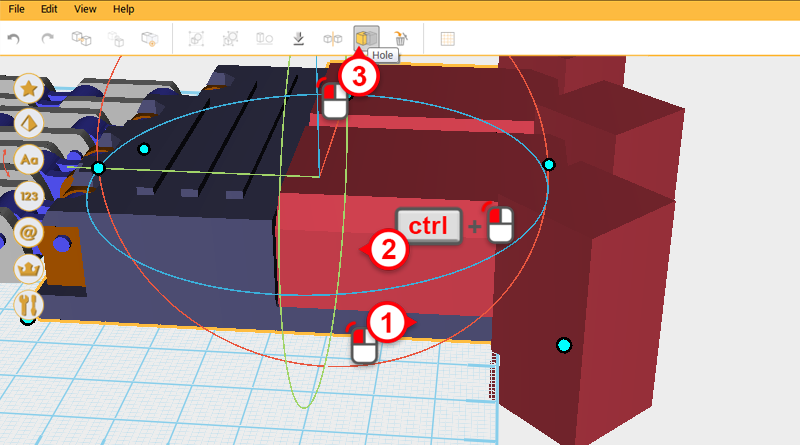
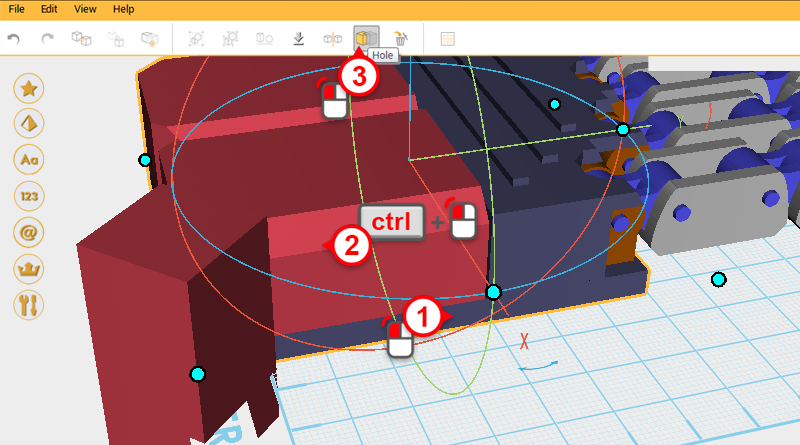
 接著利用這三個「切削」物件與﹝Hole﹞功能,將「掌心」物件與「手掌底板」物件切削為如圖所示的樣子。
接著利用這三個「切削」物件與﹝Hole﹞功能,將「掌心」物件與「手掌底板」物件切削為如圖所示的樣子。