XYZmaker建模教學 – 機械手PART7
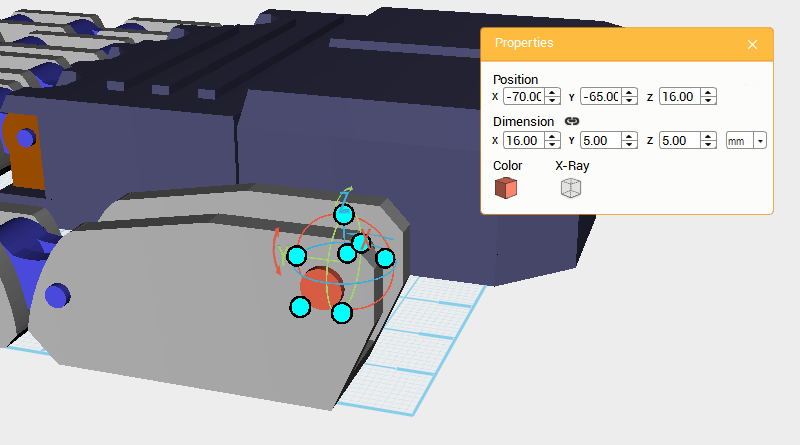 接下來要製作拇指與手掌連接的關節物件,建立一個﹝Cylinder﹞物件,對Y軸旋轉90度後,將尺寸設定為X: 16,Y: 5,Z: 5 mm,位置設定為X: -70,Y: -65,Z: 16。
接下來要製作拇指與手掌連接的關節物件,建立一個﹝Cylinder﹞物件,對Y軸旋轉90度後,將尺寸設定為X: 16,Y: 5,Z: 5 mm,位置設定為X: -70,Y: -65,Z: 16。 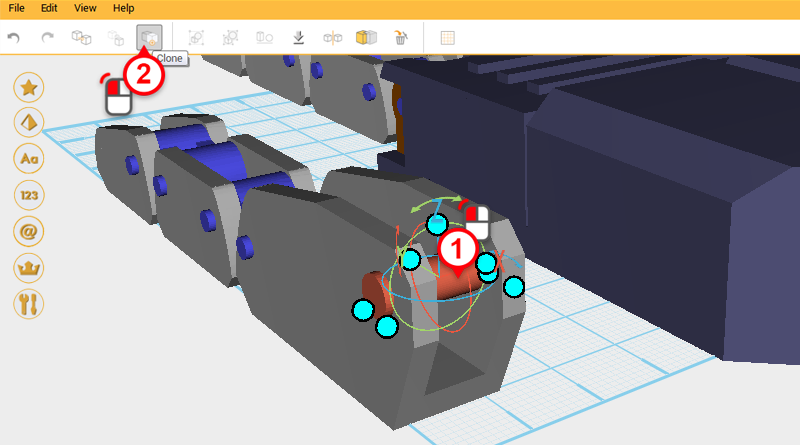
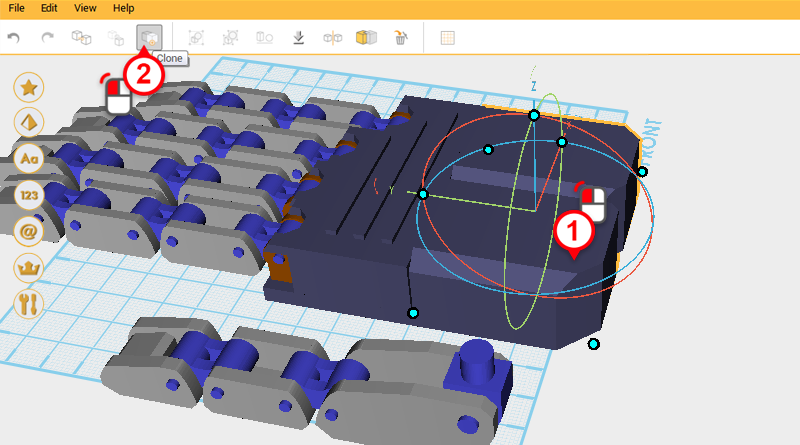
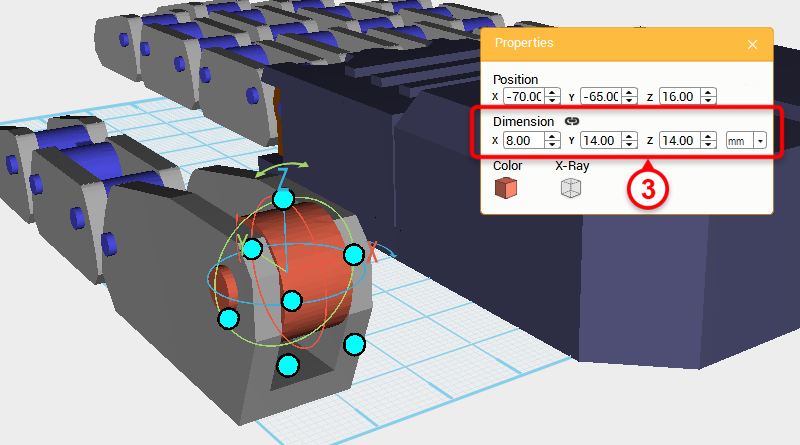 選取﹝Cylinder﹞物件,按下﹝Clone﹞按鈕,接著將尺寸設定為X: 8,Y: 14,Z: 14 mm。
選取﹝Cylinder﹞物件,按下﹝Clone﹞按鈕,接著將尺寸設定為X: 8,Y: 14,Z: 14 mm。 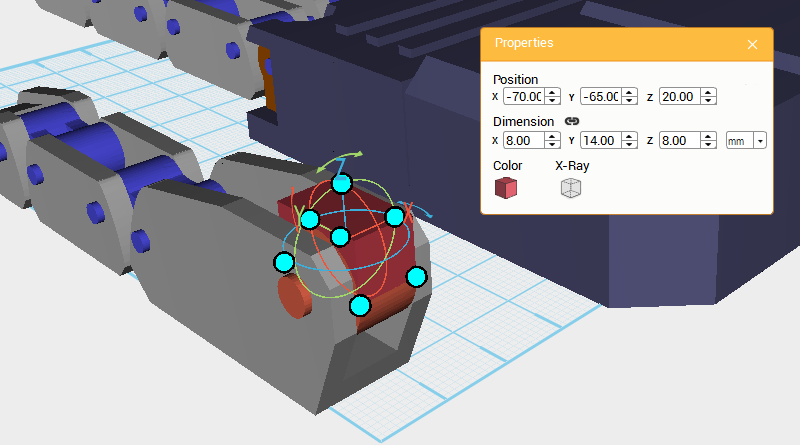 建立一個﹝Cube﹞物件,尺寸設定為X: 8,Y: 14,Z: 8 mm,位置設定為X: -70,Y: -65,Z: 20。
建立一個﹝Cube﹞物件,尺寸設定為X: 8,Y: 14,Z: 8 mm,位置設定為X: -70,Y: -65,Z: 20。 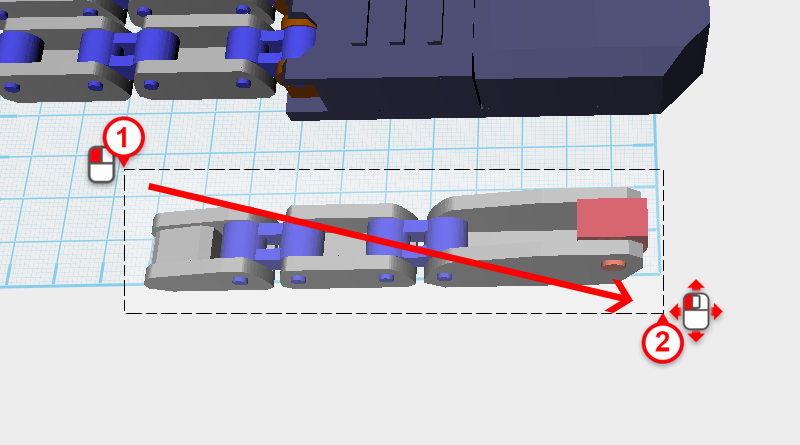
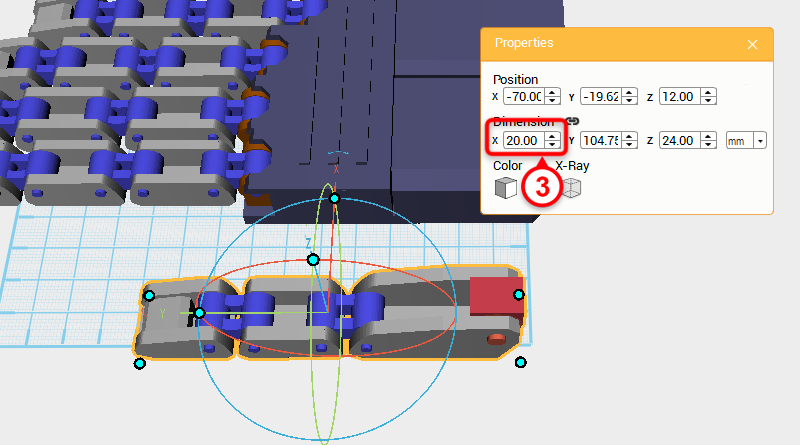 接下來要將拇指加粗,框選圖中的物件,接著將尺寸的X值設定為20mm。
接下來要將拇指加粗,框選圖中的物件,接著將尺寸的X值設定為20mm。 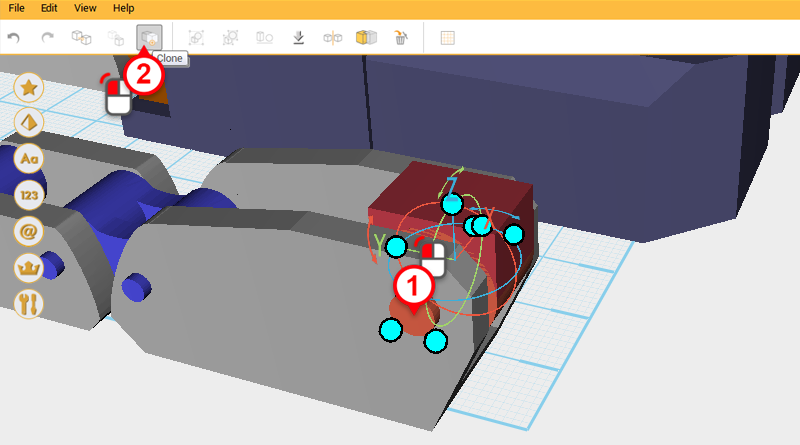
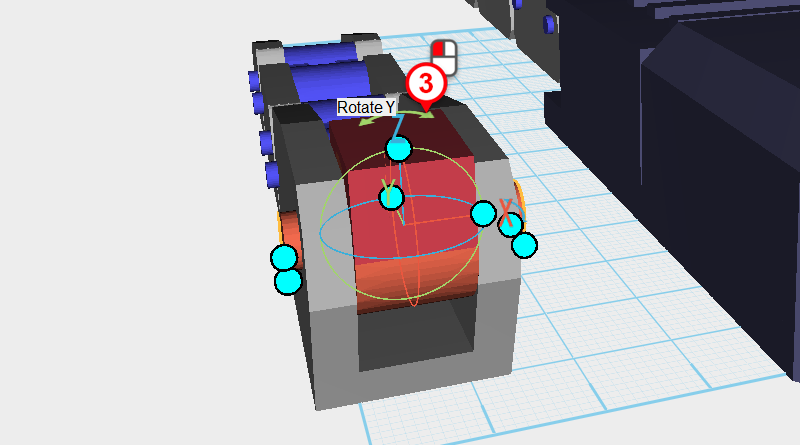
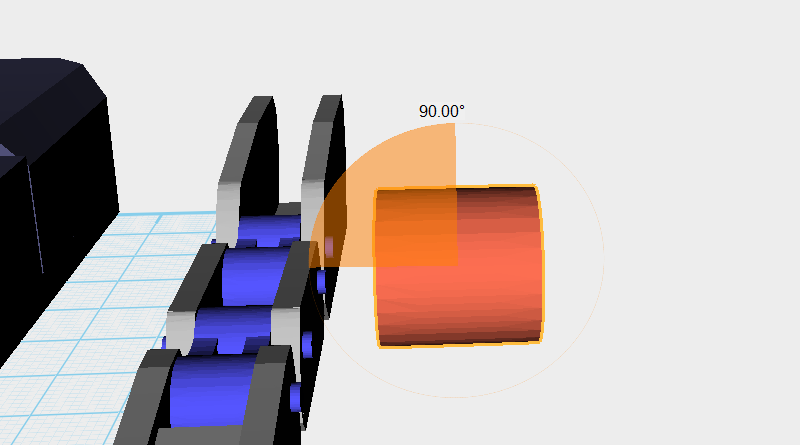
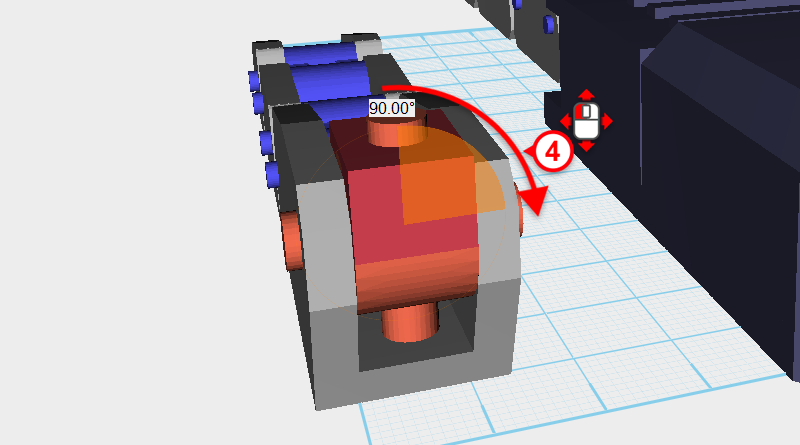 選取圖中的﹝Cylinder﹞物件,按下﹝Clone﹞按鈕,接著按住控制器中Z字母上方的箭頭,拖曳滑鼠直到旋轉數值顯示為90度。
選取圖中的﹝Cylinder﹞物件,按下﹝Clone﹞按鈕,接著按住控制器中Z字母上方的箭頭,拖曳滑鼠直到旋轉數值顯示為90度。 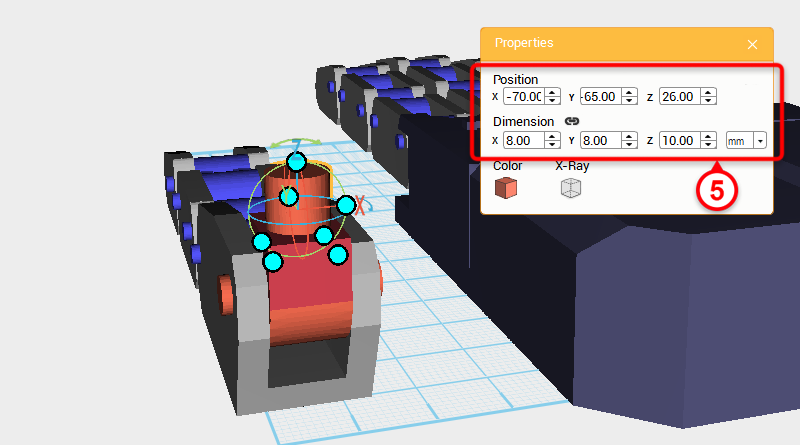 最後將﹝Cylinder﹞物件的尺寸設定為X: 8,Y: 8,Z: 10 mm,位置的Z值設定為26。
最後將﹝Cylinder﹞物件的尺寸設定為X: 8,Y: 8,Z: 10 mm,位置的Z值設定為26。 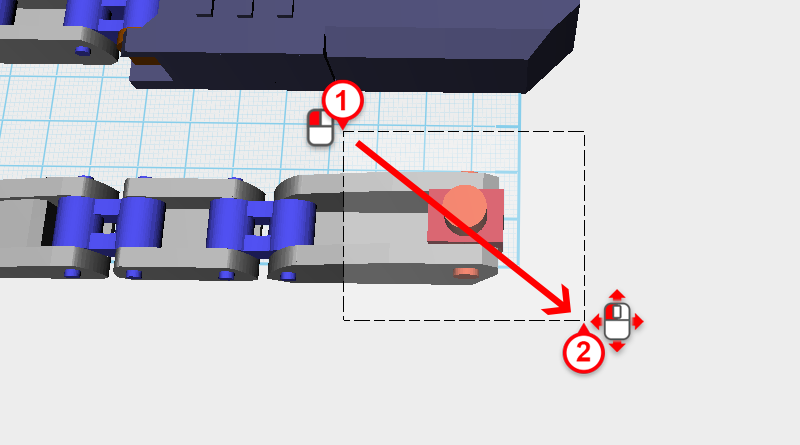
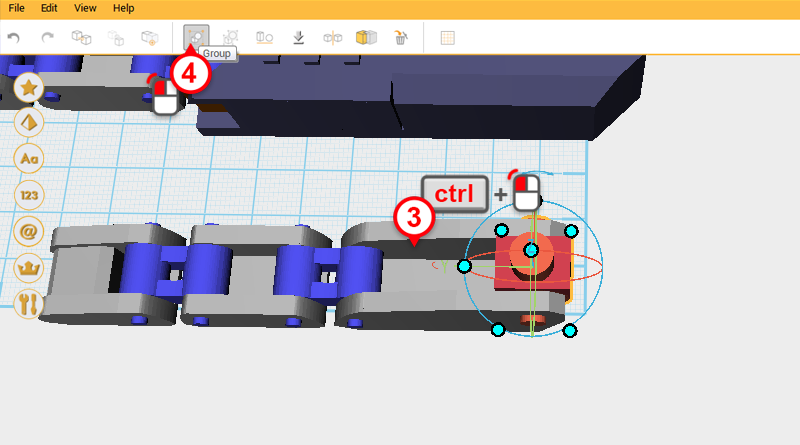 如圖所示框選物件,按住鍵盤的﹝ctrl﹞鍵點擊減選「拇指根部」物件,接著按下﹝Group﹞按鈕。
如圖所示框選物件,按住鍵盤的﹝ctrl﹞鍵點擊減選「拇指根部」物件,接著按下﹝Group﹞按鈕。 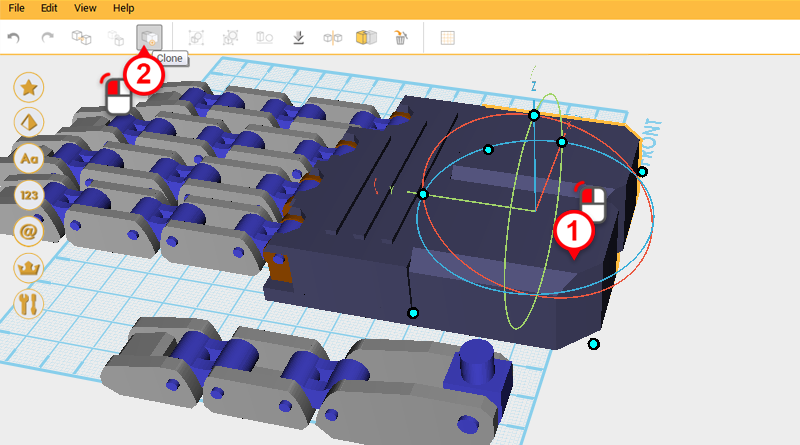
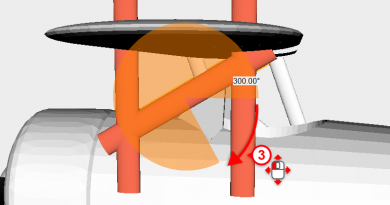
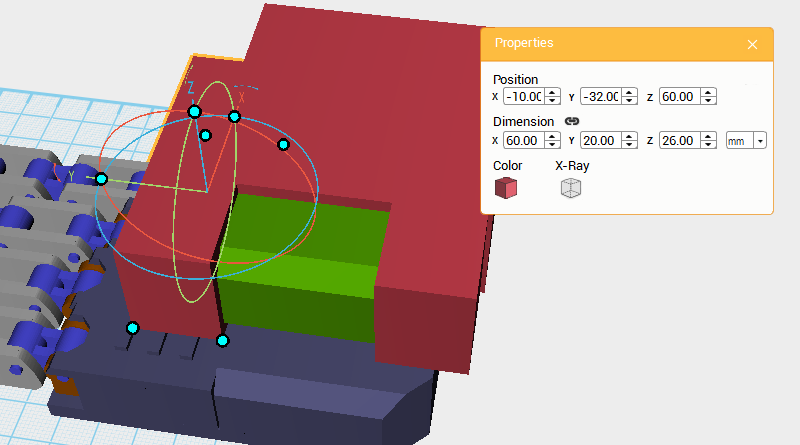
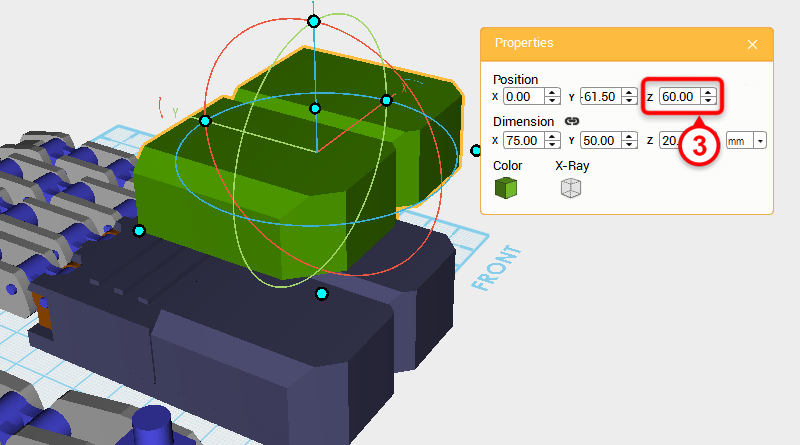 手掌與拇指連結處也需要一個旋轉關節,選取「掌心」物件,按下﹝Clone﹞按鈕,接著將位置的Z值設定為60,作為「拇指根部關節」物件,同時改變顏色以方便觀察。
手掌與拇指連結處也需要一個旋轉關節,選取「掌心」物件,按下﹝Clone﹞按鈕,接著將位置的Z值設定為60,作為「拇指根部關節」物件,同時改變顏色以方便觀察。 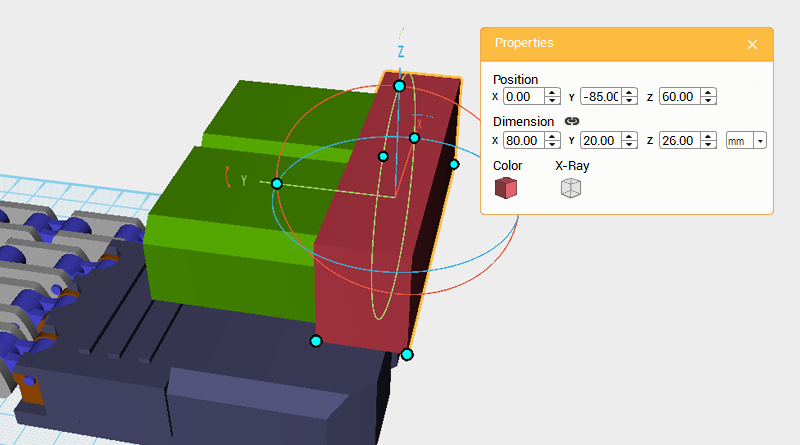
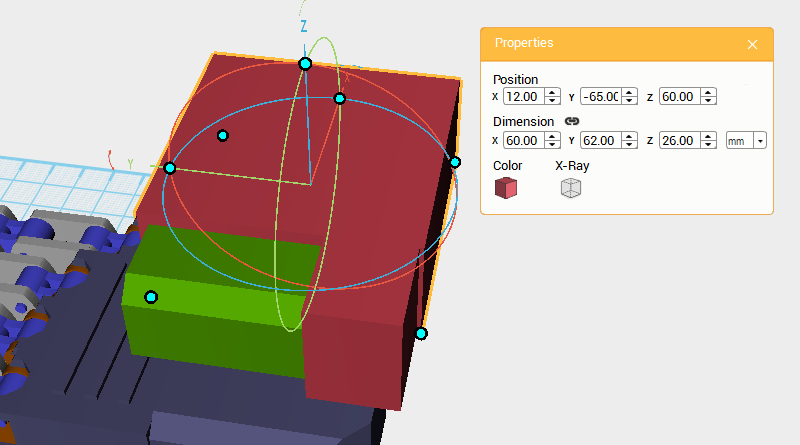
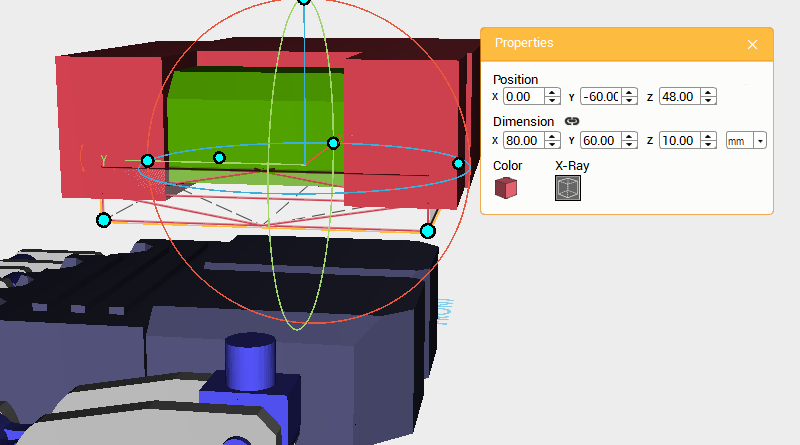 建立四個﹝Cube﹞物件並依圖所示設定尺寸與位置,作為「切削」物件。
建立四個﹝Cube﹞物件並依圖所示設定尺寸與位置,作為「切削」物件。 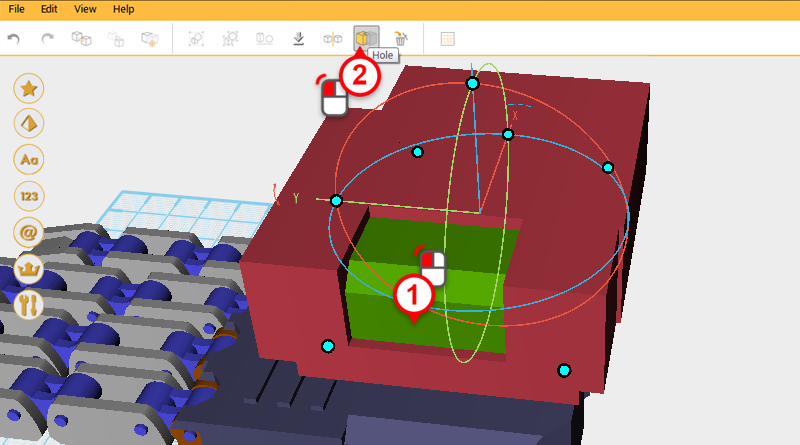
 利用這四個「切削」物件與﹝Hole﹞功能,對「拇指根部關節」物件進行切削。
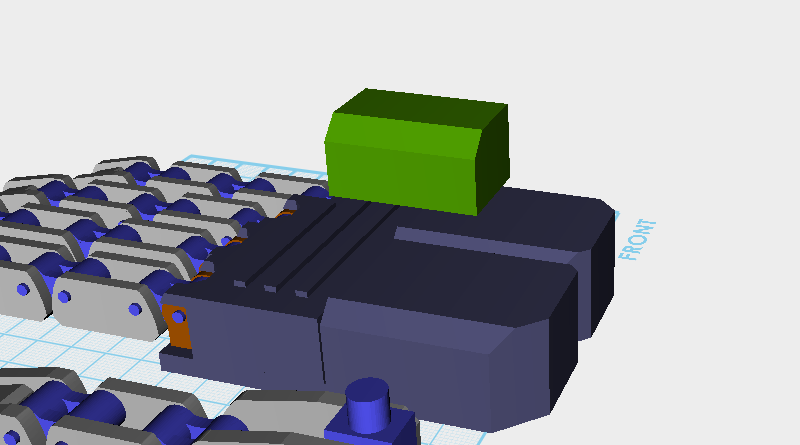
利用這四個「切削」物件與﹝Hole﹞功能,對「拇指根部關節」物件進行切削。 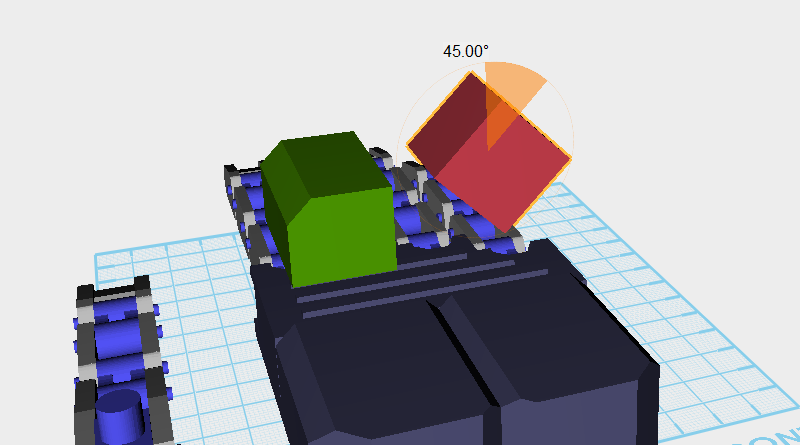 接下來還需要繼續將「拇指根部關節」切削出斜角,轉動時才不會卡住,建立一個﹝Cube﹞物件,移動至「拇指根部關節」物件附近的位置,接著對Y軸旋轉45度,作為「切削」物件。
接下來還需要繼續將「拇指根部關節」切削出斜角,轉動時才不會卡住,建立一個﹝Cube﹞物件,移動至「拇指根部關節」物件附近的位置,接著對Y軸旋轉45度,作為「切削」物件。 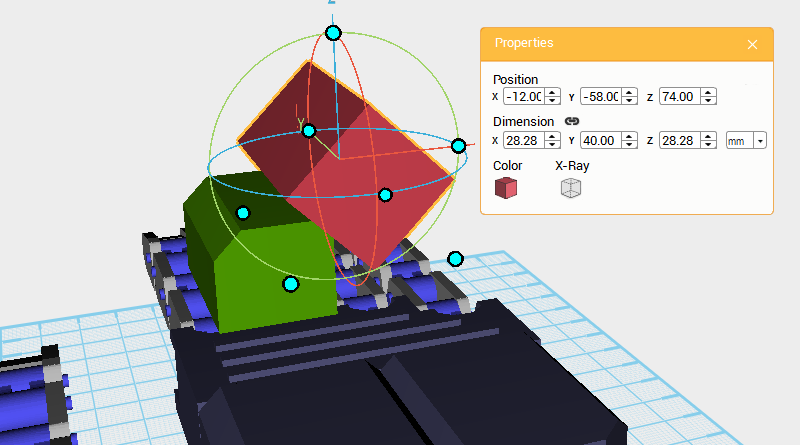 選取「切削」物件,將尺寸的Y值設定為40,位置設定為X: -12,Y: -58,Z: 74。
選取「切削」物件,將尺寸的Y值設定為40,位置設定為X: -12,Y: -58,Z: 74。 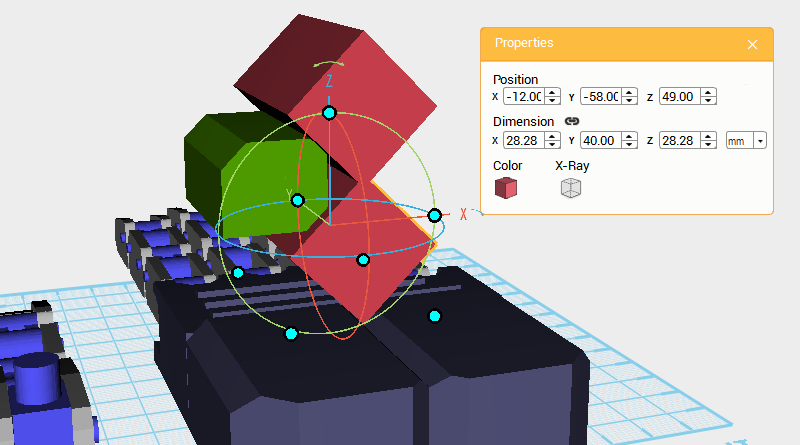 拷貝「切削」物件,將位置的Z值設定為49。
拷貝「切削」物件,將位置的Z值設定為49。 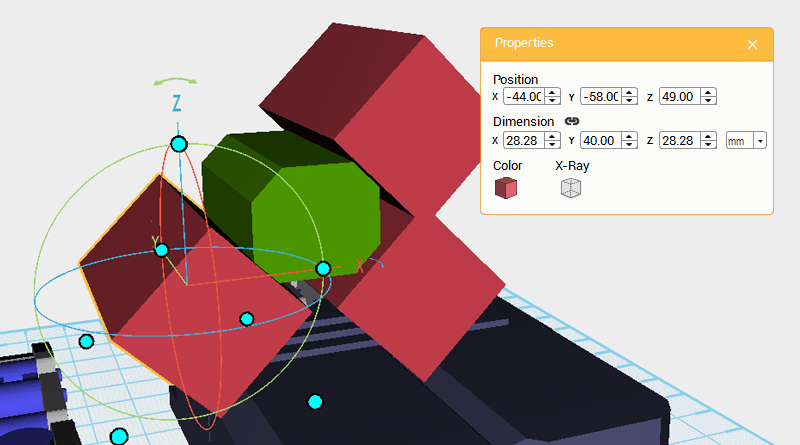 再次拷貝「切削」物件,將位置的X值設定為-44,Z值設定為49。
再次拷貝「切削」物件,將位置的X值設定為-44,Z值設定為49。 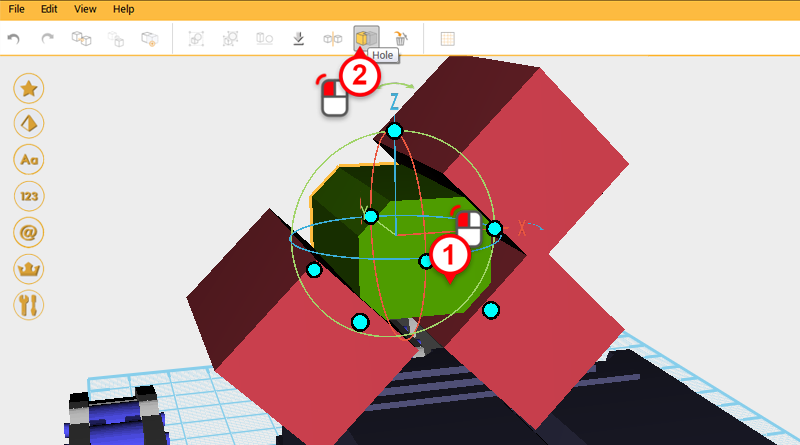
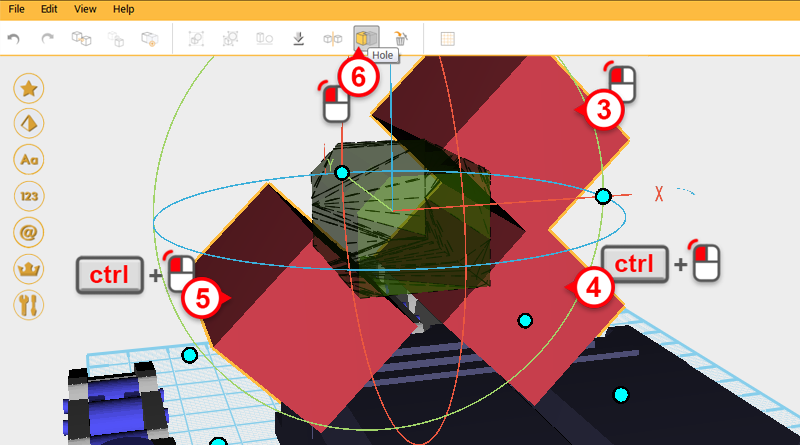
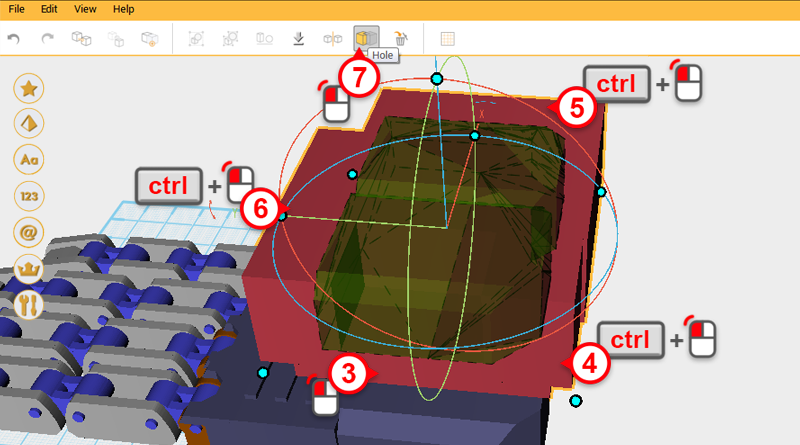
 利用這三個「切削」物件與﹝Hole﹞功能,對「拇指根部關節」物件進行切削。
利用這三個「切削」物件與﹝Hole﹞功能,對「拇指根部關節」物件進行切削。 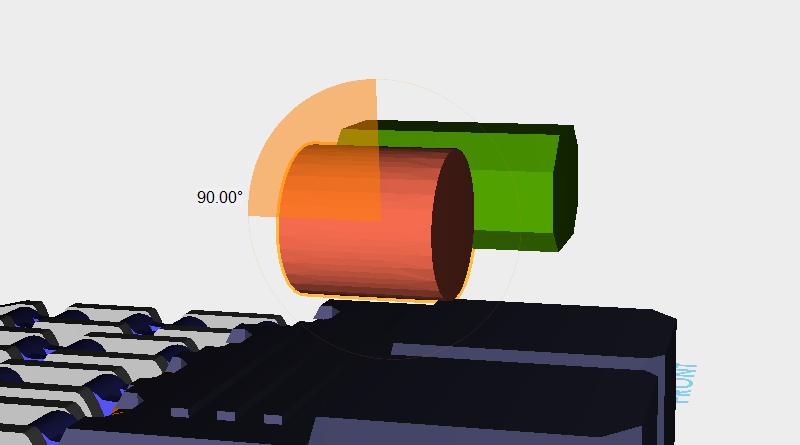 建立一個﹝Cylinder﹞物件,移動至「拇指根部關節」物件附近的位置,接著對X軸旋轉90度。
建立一個﹝Cylinder﹞物件,移動至「拇指根部關節」物件附近的位置,接著對X軸旋轉90度。 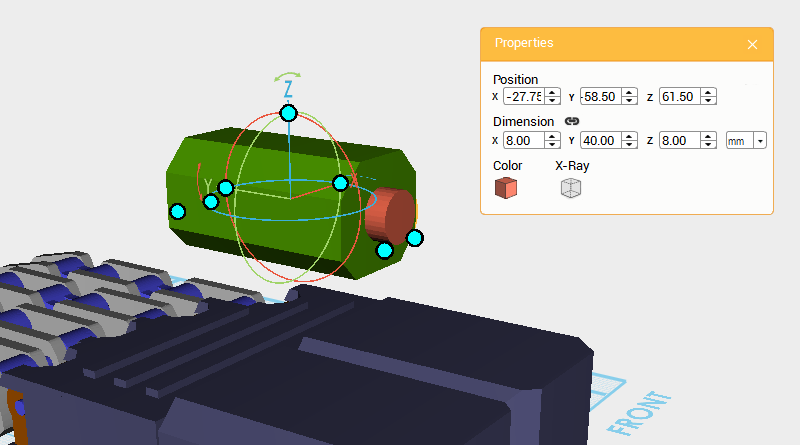 將﹝Cylinder﹞物件尺寸設定為X: 8,Y: 40,Z: 8 mm,位置設定為X: -27.75,Y: -58.5,Z: 61.5。
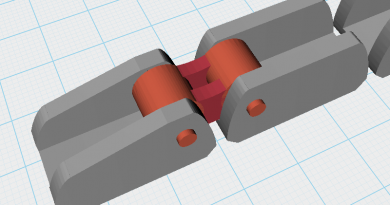
將﹝Cylinder﹞物件尺寸設定為X: 8,Y: 40,Z: 8 mm,位置設定為X: -27.75,Y: -58.5,Z: 61.5。 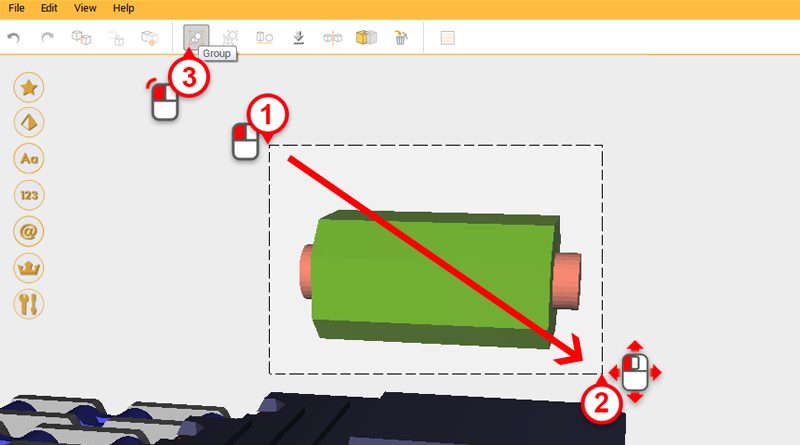 框選圖中的物件,按下﹝Group﹞按鈕,完成「拇指根部關節」物件。
框選圖中的物件,按下﹝Group﹞按鈕,完成「拇指根部關節」物件。 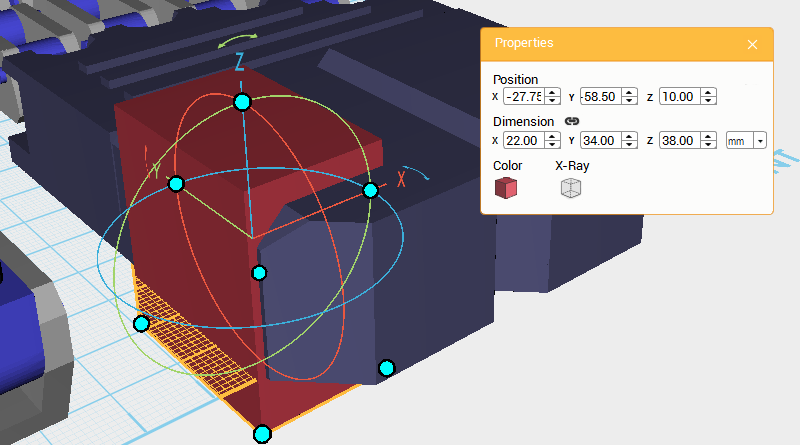 接下來要對「掌心」物件切削出放置「拇指根部關節」物件的空間。建立一個﹝Cube﹞物件,尺寸設定為X: 22,Y: 34,Z: 38 mm,位置設定為X: -27.75,Y: -58.5,Z: 10,作為「切削」物件。
接下來要對「掌心」物件切削出放置「拇指根部關節」物件的空間。建立一個﹝Cube﹞物件,尺寸設定為X: 22,Y: 34,Z: 38 mm,位置設定為X: -27.75,Y: -58.5,Z: 10,作為「切削」物件。  利用「切削」物件與﹝Hole﹞功能,對「掌心」物件進行切削。
利用「切削」物件與﹝Hole﹞功能,對「掌心」物件進行切削。 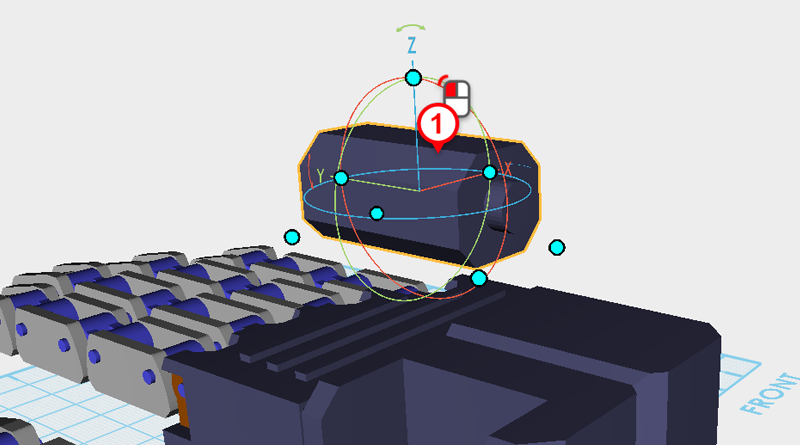
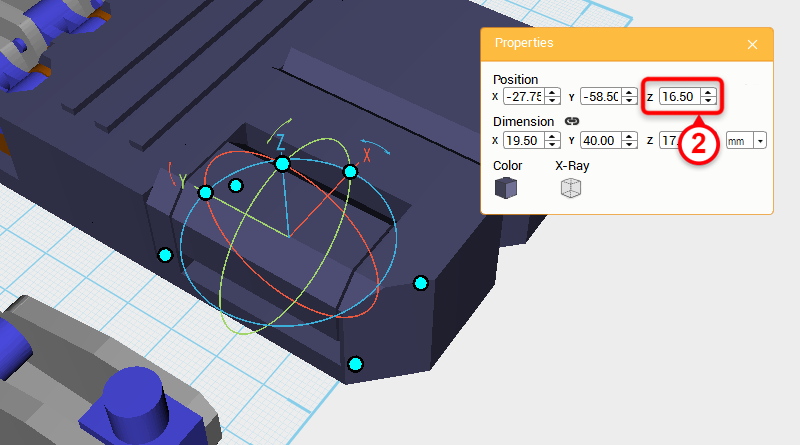 選取「拇指根部關節」物件,將位置的Z值設定為16.5。
選取「拇指根部關節」物件,將位置的Z值設定為16.5。 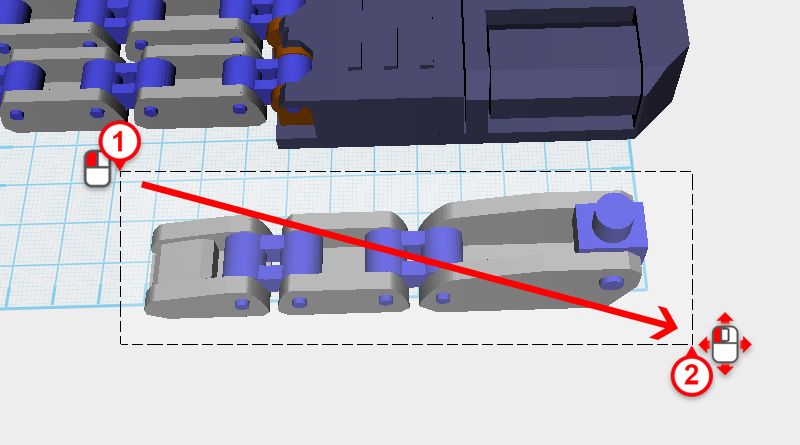
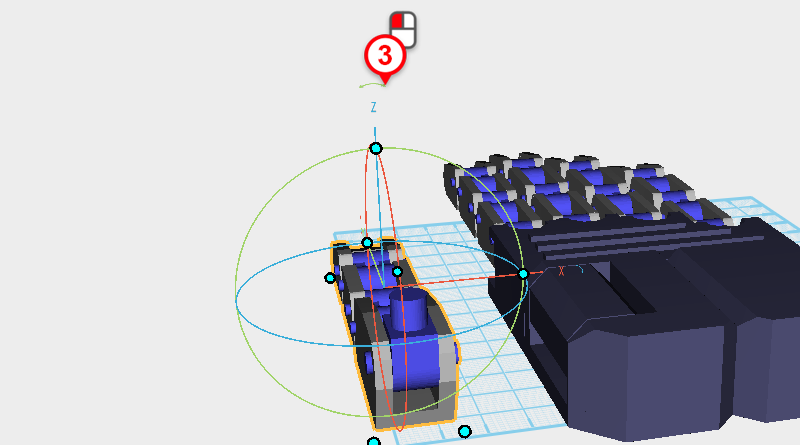
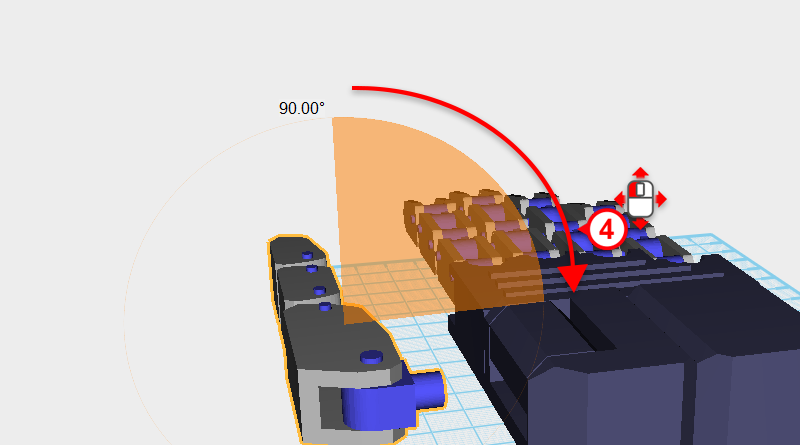 如圖所示框選所有拇指模型,按住控制器中Z字母上方的箭頭,拖曳滑鼠直到旋轉數值顯示為90度。
如圖所示框選所有拇指模型,按住控制器中Z字母上方的箭頭,拖曳滑鼠直到旋轉數值顯示為90度。 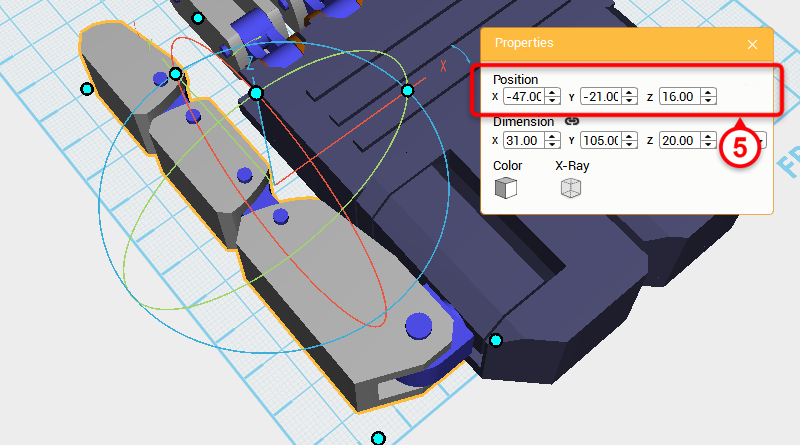 最後將位置設定為X: -47,Y: -21,Z: 16,將拇指與手掌組合起來。
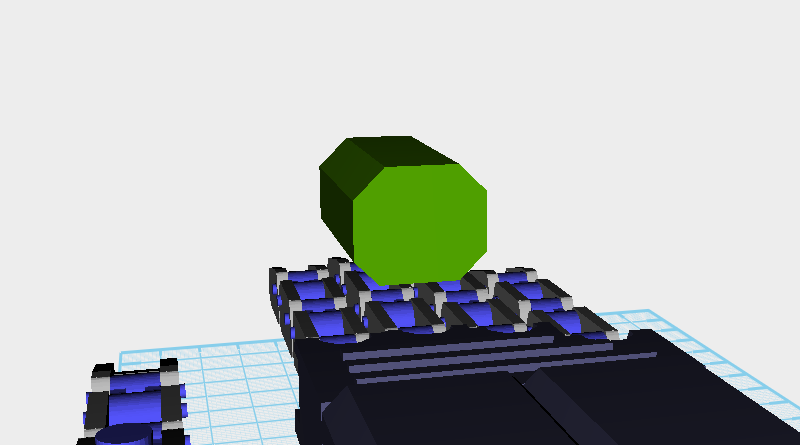
最後將位置設定為X: -47,Y: -21,Z: 16,將拇指與手掌組合起來。 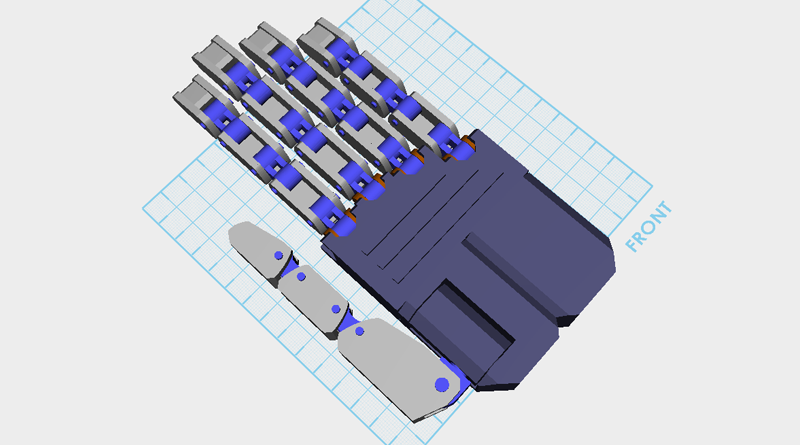 目前階段完成的模型應如圖所示。
目前階段完成的模型應如圖所示。